

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Режим приема сигналов на ненаправленную антенну служит для прослушивания сигналов радиомаяков.
Режим приема сигналов на направленную антенну является вспомогательным и служит для принудительной установки гониометра с помощью дистанционного включения электродвигателя в положение, позволяющее определить пеленг на слух.
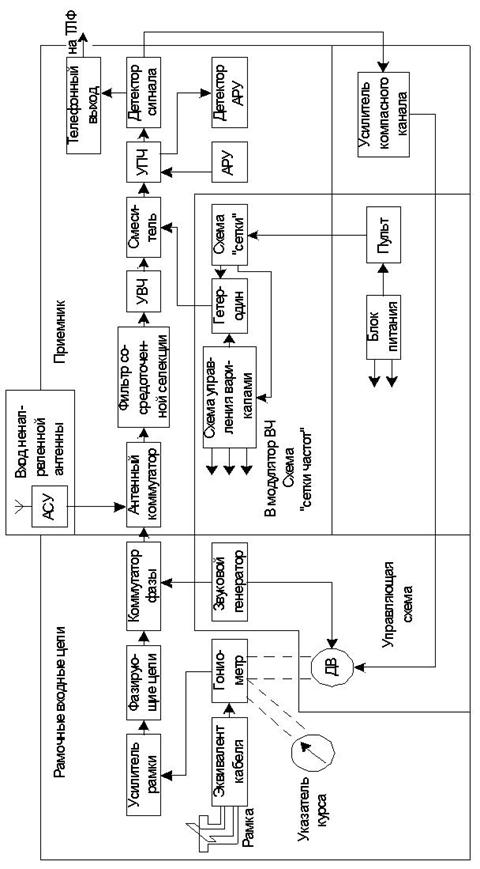
Рис.11. Функциональная схема АРК-15.
3.15 Принципы построения курсовых систем.
Курс является одним из важнейших параметров, знание которого необходимо для решения задач навигации и управления. Для определения курса самолетов была создана самая многочисленная группа курсовых приборов и систем, основанных на различных физических принципах.
Направление меридиана можно определить на борту летательного аппарата с помощью компаса, гирокомпаса, радиокомпаса к астрокомпаса.
Первыми курсовыми приборами, применявшимися на самолетах, были авиационные магнитные компасы (АМК). В зависимости от назначения они отличались по своим точностным, габаритным и массовым данным. Наиболее точными были штурманские компасы типа А, использовавшиеся в навигационных целях, менее точными с меньшими габаритными размерами были компасы для пилота, а также аварийные (дублирующие) типа КИ.
Авиационным магнитным компасом присущи существенные недостатки:
1) для определения истинного (географического) курса требуется вводить вручную поправку на магнитное склонение;
2) большие магнитные девиации, вызываемые ферромагнитными массами, расположенными на борту, и девиации, переменные во времени, вызываемые электромагнитными полями, создаваемыми электрооборудованием;
3) креповая девиация, появляющаяся при наклоне объекта относительно картушки. Если при отсутствии данного наклона девиация устраняется с помощью девиационного устройства, то при наклоне (крене) она появляется вследствие изменения взаимного расположения ферромагнитных масс и картушки;
4) поворотная погрешность, появляющаяся при выполнении поворотов (виражей) вследствие наклона картушки относительно горизонта вместе с объектом. Зависимость поворотной погрешности от крена ![]() , магнитного курса
, магнитного курса ![]() , угла магнитного наклонения
, угла магнитного наклонения ![]() имеет вид:
имеет вид:
 (11)
(11)
Данная погрешность принимает наибольшее значение при разворотах объекта на курсах![]() , равных 0° и 180°, и поэтому ее еще называют северной поворотной погрешностью. При крутых виражах (большие значения
, равных 0° и 180°, и поэтому ее еще называют северной поворотной погрешностью. При крутых виражах (большие значения ![]() )
) ![]() может составлять десятки градусов и даже, равное p. В полярных районах с уменьшением горизонтальной компоненты
может составлять десятки градусов и даже, равное p. В полярных районах с уменьшением горизонтальной компоненты ![]() (увеличение
(увеличение![]() ) данная погрешность увеличивается;
) данная погрешность увеличивается;
5) угол застоя (погрешность трения) от наличия сил трения в опоре картушки. Погрешность является значительной вследствие малости величины удельного устанавливающего момента;
6) погрешность от смещения центра тяжести картушки относительно точки опоры, возникающая при наличии переносного ускорения (ускорения объекта), в движении набора скорости и выполнения эволюции;
7) погрешность от увлечения (поворота) картушки заполняющей корпус жидкостью (силами вязкого трения жидкости), которая, в свою очередь, увлекается (раскручивается) корпусом прибора при эволюциях объекта. Погрешность зависит от продолжительности и угловой скорости разворота и может составлять от нескольких до десятков градусов;
8) свободные и вынужденные колебания картушки от возмущений, создаваемых объектом, которые даже при спокойном полете происходят с амплитудой 3 ... 5°. Эти колебания затрудняют отсчет показаний курса и пилотирование;
9) ограничение применения по широте места. С изменением широты в сторону приближения к магнитному полюсу, уменьшается горизонтальная компонента HМПЗ и соответственно возрастает угол застоя. Ограничения, связанные с появлением магнитных бурь, главным образом, в полярных областях и наличием значительных переменных по высоте магнитных аномалий.
Далее был создан прибор гирополукомпас (ГПК). Ось ротора гироскопа гирополукомласа обладает способностью сохранять свое положение неизменным относительно неподвижных звезд. Однако вследствие вращения Земли и собственных уходов гирополукомпас накапливает погрешность с течением времени. Влияние уходов которого на показания курса периодически вручную корректировались по показаниям АМК.
Пользование двумя приборами АМК и ГПК с периодической коррекцией показаний ГПК через каждые 10 ... 15 мин практически весьма затруднительно. Для решения этого вопроса и для последующего развития идей построения курсовых систем был разработан прибор с автоматической коррекцией на базе двух указанных. Магнитная система устанавливалась в опорах на кожухе гироузла. При рассогласовании положений оси гироскопа (кожуха) и магнитной системы на гироскоп (посредством пневмо-системы) накладывался момент, приводящий его в согласованное положение (в меридиан). Прибор получил название - гиромагнитного компаса (ГМК).
Для решения задач навигации (в горизонтальном полете по маршруту) требовалось применять более точный штурманский магнитный компас. Поэтому наряду с ГМК естественным было развитие дистанционных магнитных компасов (ДМК) с применением дистанционных передач и следящих систем. При разработке решалась задача создания эффективного средства устранения девиаций, особенно переменных во времени, путем установки магнитной системы в местах, где абсолютная величина девиации мала. Одновременно решалась и другая задача уменьшения дублирования курсовых приборов. ДМК состоит из двух основных частей: магнитного датчика (МДМ) направления меридиана (указателя меридиана) и дистанционной передачи угла поворота объекта относительно магнитного датчика, включая и сам указатель курса. В зависимости от типа дистанционной передачи ДМК получили соответствующие названия: при использовании потенциометрической дистанционной передачи — потенциометрические дистанционные компасы (ПДК); при использовании индукционной дистанционной передачи — индукционные дистанционные компасы - (ИДК).
С целью облегчения пилотирования (выдерживания курса) и выполнения разворотов на заданные углы наряду с ДМК использовались также и ГПК. Недостаточная точность определения курса при помощи ДМК и необходимость дополнительно использовать помимо ДМК второй прибор ГПК естественно рождали идеи построения курсовых приборов в двух направлениях: изыскание новых принципов и средств использования МПЗ для повышения точности ДМК и построение дистанционных ГМК, исключающих необходимость применения двух приборов.
С созданием ДМК стало возможным вместо недистанционного ГМК осуществить идею создания и дистанционного ГМК, т. е. ДГМК, обладающего лучшими свойствами из-за дистанционности размещения магнитного датчика.
Магнитные дистанционные гидроскопические компасы типа ДГМК предназначены для определения курса и углов разворота ЛА. Чувствительным элементом ДГМК является магнитная система, устанавливающаяся по направлению компасного меридиана. В компасах ДГМК применяется потенциометрическая дистанционная передача. Указатели магнитного дистанционного компаса ДГМК-3 выдают компасный курс, указатели компаса ДГМК-5 совместно с радиокомпасом выдают компасный курс, курсовой угол радиостанции и магнитный пеленг радиостанции.
В отличие от компасов ДГМК-3 и ДГМК-5 компас ДГМК-7 может указывать истинный курс, так как конструкция компаса обеспечивает автоматическое устранение девиации и ручной ввод поправки на магнитное склонение.
Трехэлементный магнитный зонд и гировертикаль, на которую он устанавливается, образуют индукционный датчик (ИД) МПЗ. Для преобразования значений ЭДС индукционных элементов в угловую величину, определяющую направление магнитного меридиана, используется сельсин, функционирующий в трансформаторном режиме. Система, состоящая из ИД, сельсина со следящей системой, основного указателя (штурмана) и дополнительных дистанционных указателей (повторители), образует дистанционный индукционный компас (ДИК).
Курсовая система ДИК обладает существенными преимуществами по своим характеристикам по сравнению с системами ДМК и тем более по сравнению с АМК. Эти преимущества определяются свойствами ИД и сводятся к следующему: нет больших значений поворотных погрешностей (медленное возрастание из-за отклонения гировертикали); нет в обычном смысле угла застоя; нет погрешности от увлечения; устойчивые показания курса, так как нет свободных и вынужденных колебаний индукционного датчика; меньше ограничения применения по широте места; применяемый в приборе девиационный механический корректор позволяет устранить с достаточной точностью постоянную во времени девиацию (кроме креновой), а также систематические инструментальные погрешности; высокая точность в полете по маршруту (погрешность указателя штурмана ±1°, повторителей ±2°).
Однако ДИК имеет и существенные недостатки: сложность, большие габаритные размеры и масса устройства ИД; при наличии длительных ускорений объекта как при наборе скорости, так и при выполнении эволюции накапливается значительная погрешность, которая, с момента движения, без ускорений медленно устраняется вследствие медленного восстановления гироскопа к вертикали. Подобный прибор применялся на тяжелых самолетах.
Используя закономерность движения небесных светил (в первую очередь Солнца), были созданы астрокомпасы для определения истинного курса.
Основными идеями построения астрокомпасов являются две: первая - построение модели автоматически действующей небесной сферы (точнее части ее), в результате чего образуется указатель истинного меридиана (экваториальный астрокомпас); другая - измерение курсового угла светила путем пеленгации последнего и вычисление азимута светила по данным координат местонахождения объекта и географического места светила (горизонтальный астрокомпас). Суммирование этих двух углов дает истинный курс. Астрокомпасы находят широкое применение, они лишены большинства недостатков, присущих компасам АМК и ДМК. Однако их функционирование возможно при оптической видимости Солнца и знании географических координат местонахождения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
