Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
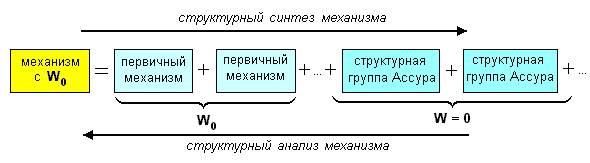
Рис. 5
При структурном синтезе механизма по Ассуру к выбранным первичным механизмам с заданной подвижностью W0 последовательно присоединяются структурные группы c нулевой подвижностью. Полученный таким образом механизм обладает рациональной структурой, т. е. не содержит избыточных связей и подвижностей.
Структурному анализу по Ассуру можно подвергать только механизмы, не содержащие избыточных связей и подвижностей. Поэтому перед проведением структурного анализа необходимо устранить избыточные связи и выявить местные подвижности. Затем необходимо выбрать первичные механизмы и, начиная со звеньев наиболее удаленных от первичных, выделять из состава механизма структурные группы нулевой подвижности. При этом необходимо следить, чтобы звенья, остающиеся в механизме, не теряли связи с первичными механизмами.
Механизмы I класса (двухзвенные простейшие механизмы) широко применяются в технике, например, в турбинах, электродвигателях, генераторах и т. п.
Как следует из сформулированного закона Ассура, двухзвенный (первичный) механизм представляет собою основу многозвенного механизма. Его подвижное звено является входным звеном образуемого механизма.
Очевидно, одна и та же стойка может одновременно входить в состав нескольких таких двухзвенных, не зависящих друг от друга механизмов. Подвижные звенья этих механизмов представляют собою не что иное, как начальные звенья, причем каждое из них всегда будет иметь одну степень подвижности.
Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна содержит свободный элемент звена, называются поводками.
Для групп Ассура в плоских механизмах формула Чебышева принимает вид
3n –2p5 = 0.
Это позволяет найти соотношение между числом звеньев и кинематических пар, составляющих группу
p5 = 1,5n.
Группы могут быть различной степени сложности. В зависимости от сложности, структурные группы Ассура делятся на классы, а классы в свою очередь делятся на порядки (см. табл. 2).
Классом структурной группы Ассура называется наибольшее число кинематических пар, входящих в замкнутый контур внутри группы.
Порядок группы определяется числом поводков (при этом нельзя присоединять группы к одному звену).
Механизмы классифицируются по степени сложности групп, входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп (табл. 2).
Таблица 2

Особенность структурных групп Ассура – их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Поэтому нельзя присоединять группу Ассура к одному звену – она при этом теряет подвижность, составляя единое целое с этим звеном. Используя группы Ассура, удобно проводить структурный, кинематический и силовой анализ механизмов.
Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура II класса 2-го порядка. Такие структурные группы (обычно называемые двухповодковыми группами Ассура) дополнительно классифицируются по видам, различающимся сочетанием вращательных и поступательных пар (рис. 6). Видно, что каждый новый вид структурной группы получается из предыдущей путем замены вращательных пар на поступательные. Отметим, что при замене всех трех кинематических пар на поступательные получается механизм.
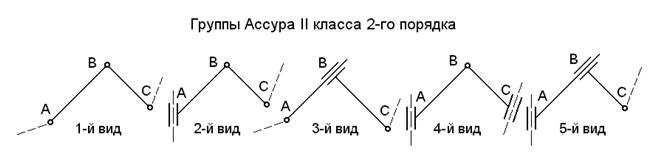
Рис. 6
Структурный анализ механизма проводится путем расчленения его на структурные группы и первичные механизмы в порядке, обратном образованию механизма.
1.8. Структурный анализ заданного механизма
Задачей структурного анализа заданного механизма является определение его степени подвижности, класса и порядка.
Последовательность действий при проведении структурного анализа
1 Определяются звенья и кинематические пары заданного механизма, и вычерчивается его структурная или кинематическая схема
2 Выявляются и устраняются лишние звенья и дублирующие кинематические пары.
3 По формуле Чебышева определяется степень подвижности механизма.
4 В соответствии со степенью подвижности определяется одно или несколько начальных звеньев, которые вместе со стойкой образуют первичные механизмы.
5 Начиная со звеньев, наиболее удаленных от первичного механизма, выделяются из состава механизма структурные группы нулевой подвижности (группы Ассура). Начинать надо с попытки отсоединить группы II класса. Если это не получается, то следует пробовать выделять группы III класса и т. д. При этом остающиеся в механизме звенья не должны потерять связь с первичным механизмом. Кроме того, оставшийся механизм должен иметь ту же степень подвижности, что и исходный.
6 По классу и порядку наиболее сложной из групп Ассура определяется класс и порядок заданного механизма.
2. Кинематический анализ механизмов
2.1. Задачи кинематики механизмов
Кинематика – раздел механики, изучающий движение без учета причин, вызывающих движение. Соответственно, кинематика механизма изучает движение его звеньев как таковое. Для описания движения используются кинематические характеристики: перемещение (изменение положения), скорость и ускорение. Соответственно различают задачи о положениях, о скоростях, об ускорениях. Решение указанных задач не является самоцелью – они необходимы для последующего полного исследования механизма. Таким образом, кинематика представляет хотя и первую, но важнейшую часть механики машин. В простейших случаях при первоначальном изучении машин можно ограничиться только кинематикой.
Кинематика механизмов в настоящее время изучена достаточно хорошо. Все существующие методы изучения кинематики механизмов можно разделить на графические и аналитические. Распространено мнение, что графические методы недостаточно точны. Действительно, их точность определяется точностью чертежно-измерительного инструмента, а точность аналитических методов практически не ограничена. Но на самом деле точность аналитических методов не может быть выше точности исходных данных, получаемых с помощью того же измерительного инструмента. Преимущество аналитических методов заключается в возможности сравнения близких величин, и в относительно простом их программировании. Преимущество графических методов в простоте и наглядности. Поэтому и те, и другие методы широко используются при изучении кинематики механизмов.
2.1. Графические методы изучения кинематики механизмов
Всякое графическое построение начинается с выбора масштабного коэффициента.
Масштабный коэффициент – это отношение истинного значения параметра к длине отрезка, изображающего его на чертеже.
Истинное значение параметра берется в свойственных ему единицах измерения, а длина отрезка – в миллиметрах. Мы будем использовать масштабные коэффициенты длин kl, скоростей kv, ускорений ka. Если обозначить длину кривошипа LOA, скорость точки А – VA, ускорение точки А – aA, а длины отрезков, изображающих их на чертеже, по точкам начала и конца, например,
ОА, pa, πa, то ķl = LOA/ OA, kv = VА / pa, ka = aА/πa.
Рассмотрим метод планов, заключающийся в последовательном построении плана положений, плана скоростей и плана ускорений для заданного механизма.
2.3. Метод планов
2.3.1. План положений механизма
Планом положений механизма называется совмещенное изображение положений механизма, соответствующих нескольким значениям обобщенной координаты, в качестве которой обычно выступает параметр, описывающий положение начального звена.
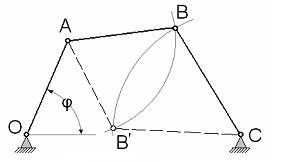
Рис. 1
Рассмотрим построение плана положений четырехзвенника методом засечек. Построение производится в следующей последовательности:
1 Наносятся неподвижные точки механизма (О и С на рис.1).
2 Строится положение начального звена ОА, соответствующее заданной обобщенной координате φ.
3 Строятся линии возможных положений точек или звеньев механизма (дуги радиусов ВА и ВС).
4 Точки пересечения линий соединяются с другими точками механизма (линии ВА и ВС).
На рис. 1 имеются две точки пересечения, соответствующие двум возможным положениям механизма. На практике, исключая частные случаи, возможен только один вариант – он определяется сборкой механизма, прямой или обратной. Полученные два положения механизма соответствуют аналитическому решению задачи о положении такого механизма, которое сводится к квадратному уравнению, имеющему два корня.
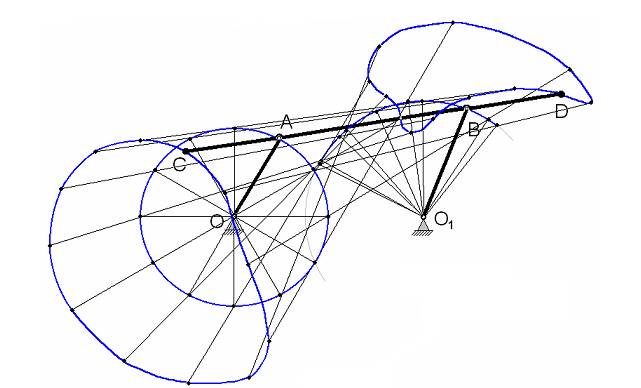
Рис. 2
Задаваясь разными значениями обобщенной координаты φ, построим план положений механизма. Если соединить одноименные точки в разных положениях механизма плавной кривой, получим их траектории – линии движения точек. Точки на шатуне двигаются по так называемым «шатунным кривым», отличающимся чрезвычайным разнообразием при различных размерах механизма. На рис. 2 построен план положений четырехзвенника, на котором показаны траектории четырех точек шатуна.
2.3.2. Основные кинематические определения и соотношения
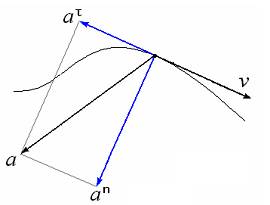
Рис. 3
Вспомним основные кинематические определения и соотношения, известные из курса теоретической механики, поскольку они лежат в основе построения планов скоростей и планов ускорений.
Скорость точки всегда направлена по касательной к траектории. Полное ускорение точки a – характеристика изменения скорости и по величине, и по направлению. Полное ускорение соответственно раскладывается на касательное aτ, отражающее изменение величины скорости, и нормальное an, отражающее изменение направления скорости.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)