Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
§ Определяются остальные составляющие реакций. Для этого в аналитических методах составляются и решаются необходимые уравнения равновесия для всей структурной группы как единой механической системы, а в графических – те же уравнения решаются графически.
§ После того, как определены реакции в крайних кинематических парах группы Асура, её разбивают на отдельные звенья, и проводится их кинетостатический расчет, начиная с поводков.
Пример расчета
В качестве примера рассчитаем простой четырехзвенник (рис. 3), выходное звено которого нагружено внешним моментом М.
Исходные данные для расчета сил инерции возьмем из плана ускорений. На рис. 4 воспроизведен план ускорений, выполненный ранее (рис. 11 в Кинематическом анализе) без дополнительных построений для получения точки d.
Определение ускорений центров тяжести звеньев (аС1, аС2 и аС3) выполняется графически на основании свойств плана ускорений. Величина главных векторов сил инерции:
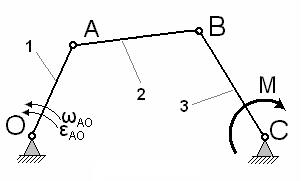
Рис 3
Fи1=maС1, Fи2=maС2, Fи3=maС.
Угловое ускорение звена 1 задано. Угловые ускорения двух других звеньев находятся также на основании свойств плана ускорений.
ε1 = εАО, ε2 = aτBA/L2, ε3 = aτBC/L3.
Отметим, что направление ε1 и ε3 – против, а ε2 – по часовой стрелке. Величина главных моментов сил инерции:
Ми1=J1Сε1, Ми2=J2Сε2, Ми3=J3Сε3.
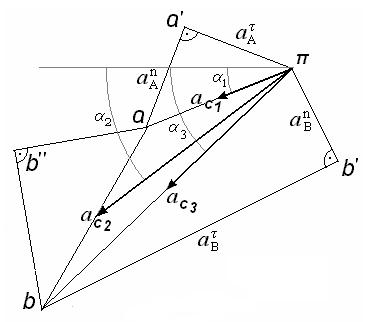
Рис. 4
Отсоединим группу Асура, состоящую из звеньев 2 и 3, и покажем все внешние силы, действующие на нее (рис. 5):
§ заданный внешний момент М;
§ силы тяжести звеньев G2 и G3;
§ реакции в шарнирах А и С, раскладывая их на составляющие, направленные вдоль и поперек оси звеньев RτA, RnA, RτC, RnC;
§ главные векторы (Fи2, Fи3) и главные моменты (Ми2, Ми3) сил инерции, направляя силы навстречу ускорениям, а моменты противоположно угловым ускорениям.
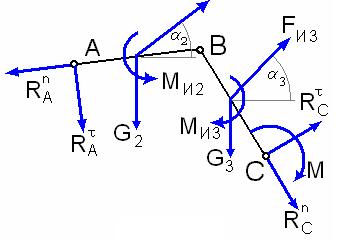
Рис. 5
Теперь, составляя для каждого звена уравнения равновесия в моментах относительно точки В, можно определить поперечные составляющие реакций в шарнирах А и С (RτA, RτC).
Дальнейший расчет может проводиться либо аналитически, либо графически. В первом случае составляются уравнения равновесия для всей структурной группы, из которых находятся остающиеся пока неизвестными продольные реакции в шарнирах А и С (RnA, RnC). Во втором случае, который будет рассмотрен далее, – используется метод плана сил, являющийся по существу графическим решением векторного уравнения ∑F=0 для всей структурной группы АВС.
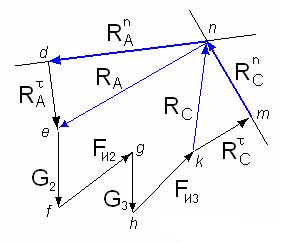
Рис. 6
При построении плана сил (рис. 6) сначала изображаются все известные силы, составляющие ломаную линию defghkm. Первой должна быть поперечная составляющая одного из шарниров (в нашем случае RτA), последней – поперечная составляющая другого шарнира (в нашем случае RτС), последовательность остальных сил не имеет значения. Из точки d проводится направление неизвестной силы RnA, а из точки m – направление неизвестной силы Rnс. Получается замкнутый силовой многоугольник defghkmn.
Реакции в шарнирах определяются сложением рассчитанных поперечных и продольных составляющих. Это можно сделать аналитически (по теореме Пифагора), либо графически. Графическое сложение выполнено на плане сил (рис. 6) – отрезки ne и kn.
Теперь появляется возможность рассчитать реакции в шарнире В. Для этого надо расчленить структурную группу АВС по этому шарниру, и рассмотреть равновесие любого из звеньев. Расчет можно выполнить аналитическим методом или методом плана сил.
3.2.3. Способы уменьшения сил, действующих на механизм
Снижение уровня сил, действующих на механизм, всегда был, есть и будет актуальным, поскольку с этим связаны вопросы работоспособности механизмов, их надежности и долговечности. Рассмотрение конкретных приемов, обеспечивающих снижение сил, не входит в задачи данного курса, поэтому ограничимся лишь общими замечаниями.
Силы полезного сопротивления являются исходными данными при создании машин и механизмов, задача их уменьшения никогда не ставится.
Уменьшение сил вредного сопротивления достигается применением смазок и антифрикционных материалов. Изучение способов борьбы с вредными последствиями трения выделилось в отдельную науку – трибологию, – и рассматривается в курсе «Трение в машинах».
Уменьшение сил тяжести звеньев механизма имеет значение не столько в плане уменьшения нагрузки на механизм, сколько в плане удобства работы с ним. Эти силы составляют незначительную долю в общей силовой нагрузке на механизм по сравнению с силами производственного (полезного) сопротивления и силами инерции.
Снижения динамических нагрузок на звенья механизма добиваются за счет уравновешивания сил инерции.
3.3. Анализ движения механизмов
Задачами этого раздела теории механизмов является определение мощности, необходимой для осуществления заданного движения, оценка энергетической эффективности механизмов, определение движения механизмов под действием приложенных сил, а также выбор соотношений между силами, массами и размерами звеньев механизма, при которых обеспечивается заданное движение.
3.3.1. Режимы движения механизма
Время движения механизма можно разбить на три части (рис. 7):
§ время пуска (разгон) tпуск;
§ время установившегося движения tуст;
§ время остановки (выбега) tост.
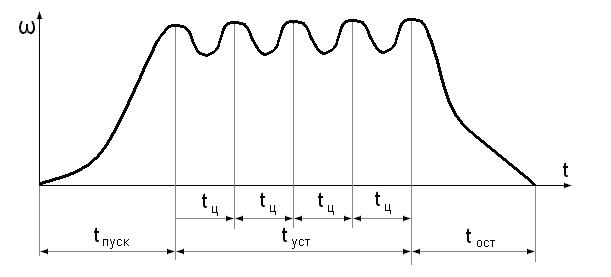
Рис. 7
Движение механизма, при котором его кинематические характеристики являются периодической функцией времени, называется установившимся. Период, по истечении которого кинематические характеристики повторяют свои значения, называется циклом установившегося движения.
Цикл может соответствовать одному или нескольким оборотам начального звена. Например, у четырехтактного двигателя внутреннего сгорания в течение цикла коленчатый вал делает два оборота.
Связь между действующими на звенья силами и кинематическими параметрами движения выражает теорема об изменении кинетической энергии
∆Т = Ад - Ас,
где ∆Т = Т - Т0 – изменение кинетической энергии за рассматриваемый промежуток времени (Т и Т0 – величина кинетической энергии в конце и начале промежутка);
Ад - Ас – суммарная работа действующих сил за рассматриваемый промежуток (Ад, Ас – работа движущих сил и сил сопротивления).
Во время пуска Ад - Ас = ∆Т > 0, то есть происходит увеличение кинетической энергии механизма за счет ускорения движения звеньев.
Во время установившегося движения Ад - Ас = ∆Т = 0, то есть скорости звеньев в конечный и начальный моменты цикла равны и вся работа движущихся сил расходуется на преодоление сопротивлений.
Во время остановки Ад - Ас = ∆Т < 0, то есть движение продолжается некоторое время за счет накопленной кинетической энергии, поглощаемой сопротивлением движению.
Это соотношение, выраженное в дифференциальной форме, является уравнением движения механизма, так как в любой момент времени ставит в однозначное соответствие силы, действующие на механизм, и его кинематические характеристики.
dТ = dАд - dАс.
Уравнение движения машины приводится к тому или иному конкретному виду и решается графическим и графоаналитическим методами.
3.3.2. Приведение сил и масс в механизме
Для исследования закона движения механизма его удобно заменить одним условным звеном – звеном приведения, имеющим закон движения одного из звеньев изучаемого механизма. В качестве звена приведения выбирается то звено, по движению которого проводится исследование механизма. Обычно это начальное звено, поскольку к нему подводится мощность, необходимая для осуществления заданного движения. Рассмотрим приведение механизма к начальному звену.
Суть приведения заключается в следующем. Основой для приведения является теорема об изменении кинетической энергии системы. Сначала без изменения механизма (то есть, кинетическая энергия и ее изменение в левой части теоремы останутся такими же как и были) заменим все внешние силы, действующие на его звенья, одной силой, приложенной к начальному звену (приведенной силой).
Приведенной называется сила, приложенная к звену приведения и производящая работу, равную суммарной работе всех внешних сил, приложенных к механизму.
Апр = ∑Аk.
Равенство работ приведенной силы и внешних сил, приложенных к механизму, означает также и равенство их мощностей. Использование же мощностей позволяет значительно упростить приведение сил.
Рпр = ∑Рk
Рk = Fk vk cos(Fk^vk)
Рпр = ∑ Fk vk cos(Fk^vk)
Приведенная сила обычно прикладывается таким образом, что действует вдоль скорости (cos(Fk^vk) = ±1), поэтому она рассчитывается из условия Рпр = Fпр vпр.
Fпр vпр = ∑ Fk vk cos(Fk^vk)
Fпр = ∑ Fk vk cos(Fk^vk) /vпр
При приведении сил к звену, движущемуся поступательно (например, к ползуну), определяется приведенная сила. При приведении сил к звену, движущемуся вращательно (например, к кривошипу), можно вычислять как приведенную силу, приложенную в определенной точке звена, так и приведенный момент, приложенный к звену в целом.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)