Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Фигура на плане скоростей, образованная векторами относительных скоростей, подобна и сходственно расположена по отношению к фигуре на звене, образованной соответствующими точками (свойство подобия).
Если, например, шатун АВ содержит точку D, то треугольник ABD должен быть подобен треугольнику abd на плане скоростей. Это свойство основано на том, что векторы относительных скоростей VBA, VAD, VDB перпендикулярны отрезкам АВ, DA и BD, и следовательно, треугольники abd и АВD имеют равные углы. Сходственность расположения заключается в одинаковом направлении обхода вершин треугольников АВD и abd. Свойство подобия позволяет найти скорость любой точки звена, если известны скорости двух точек этого звена. Для этого достаточно построить фигуру на плане скоростей подобную и сходственно расположенную по отношению к фигуре на звене.
2.3.4. План ускорений механизма
Планом ускорений механизма называется плоский пучок лучей, изображающих в масштабе абсолютные ускорения его точек. Отрезки, соединяющие концы этих лучей, изображают относительные ускорения.
Построим план ускорений шарнирного четырехзвенника (рис. 11, а). Исходными данными для его построения является план положений (рис. 11, б), угловая скорость и угловое ускорение начального звена (кривошипа ОА), а также угловые скорости всех звеньев, рассчитанные с помощью плана скоростей.
Ускорение точки А складывается из касательного и нормального ускорений, определяемых по формулам
aAn = ωОА2LOA и aAτ = εОАLOA.
Выберем масштабный коэффициент плана ускорений kа, и из полюса π отложим отрезки πа’ и а’а, изображающие в масштабе aAn и aAτ.
Для точки В запишем векторное уравнение
aB = aA + aBA.
Раскладывая неизвестные aB и aBA на касательные и нормальные составляющие, получим
aBn + aBτ = aA + aBAn + aBAτ.
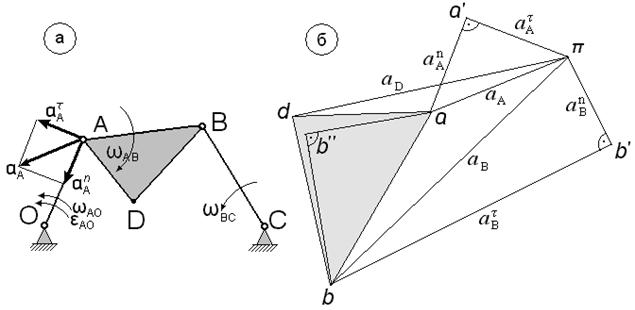
Рис. 11
В этом уравнении неизвестны только величины касательных ускорений aBτ и aBAτ. Их направления определяются линиями на плане скоростей, изображающими соответствующие скорости. Нормальные ускорения определяются по формулам aBn = ωВС2LBC, aBAn = ωВА2LBA и направлены от точки В к центру вращения, то есть, к точкам С и А соответственно.
Изображая в масштабе векторы aBn, , получаем точки b' и b''.
Из точки a откладывается вектор aBAn, а затем от его конца проводится линия направления вектора aBAτ. Из полюса π откладывается вектор aBn, и затем от его конца проводится линия направления вектора aBτ. Пересечение этих дает точку b. Выполненное построение является графическим решением исходного векторного уравнения.
План ускорений обладает свойствами, аналогичными свойствам плана скоростей.
Ускорение любой точки механизма изображается на плане ускорений направленным отрезком, начинающемся в полюсе, и заканчивающемся в точке обозначенной той же буквой.
aA = ka πa, aB = ka πb, aD = ka πd.
Относительное ускорение любой точки механизма изображается на плане ускорений направленным отрезком, начинающемся в точке, относительно которой определяется ускорение, и заканчивающемся в точке обозначенной той же буквой.
aВA = ka ab, aAB = ka ba, aDA = ka ad, aAD = ka da.
Угловое ускорение любого звена находится как отношение касательного ускорения одной точки звена относительно другой точки этого же звена к длине звена.
εВА = aτBA/LBA = ka ab"/LBA.
Направления угловых ускорений звеньев определяются по направлениям соответствующих касательных ускорений.
Фигура на плане ускорений, образованная векторами относительных ускорений, подобна и сходственно расположена по отношению к фигуре на звене, образованной соответствующими точками (свойство подобия).
Это свойство основано на том, что относительные ускорения точек одного звена, а следовательно, и соответствующие отрезки на плане ускорений, пропорциональны расстояниям между этими точками на звене. Треугольники с пропорциональными сторонами подобны. Свойство подобия позволяет по известным ускорениям двух точек звена найти ускорение любых других точек. Например, для определения ускорения точки D на шатуне надо на плане ускорений построить подобный и сходственно расположенный треугольник abd.
2.4. Аналитические методы изучения кинематики механизмов
Известно довольно много различных методов аналитического исследования кинематики рычажных механизмов. Рассмотрим один из них.
2.4.1 Метод преобразования координат
Рис. 12
Для примера применения данного метода рассмотрим механизм манипулятора, состоящий из трех звеньев. Будем считать этот механизм плоским. Это значительно упрощает задачу (степень подвижности уменьшается с 9 до 3), но сохраняет наглядность примера.
На рис. 12 представлена кинематическая схема рассматриваемого механизма – плоская открытая кинематическая цепь, составленная из трех звеньев, соединенных между собой посредством вращательных кинематических пар. Положение механизма с тремя степенями подвижности определяется тремя обобщенными координатами.
Обобщенной координатой называется независимый параметр, однозначно определяющий положение механической системы в пространстве.
В качестве обобщенных координат примем углы φ1, φ2, φ3. Размеры звеньев L1, L2, L3 известны. Требуется определить положение точки C в неподвижной системе координат xy, связанной со стойкой. Уравнения преобразования координат вытекают из простых геометрических соображений.
xA = L1 cosφ1 yA = L1 sinφ1
xB = xA + L2 cosφ2 yB = yA + L2 sinφ2
xC = xB + L3 cosφ3 yC = yB + L3 sinφ3
Решение этой системы уравнений не вызывает затруднений. Результаты, полученные при расчете первой пары уравнений, подставляются в правую часть второй пары уравнений и т. д. Таким образом, получаются аналитические выражения для координат всех точек механизма.
Большинство рычажных механизмов образовано из замкнутых кинематических цепей. Аналитическое исследование таких механизмов представляет задачу, родственную рассмотренной выше. Из замкнутой кинематической цепи путем размыкания одной кинематической пары образуются две открытых кинематических цепи. Для каждой из них составляются уравнения преобразования координат. К ним добавляются уравнения связи, налагаемые разомкнутой кинематической парой до расчленения механизма. Таким образом, получается система уравнений, из которой отыскиваются координаты всех точек механизма, определяющие его положение в пространстве.
Рассмотрим эту задачу на примере плоского шарнирного четырехзвенника (рис. 13).
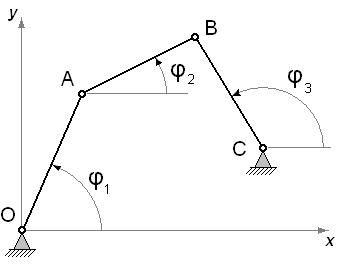
Рис. 13
Введем неподвижную систему координат ху, связав ее со стойкой. Условно разомкнем кинематическую пару в точке B. Получим две открытых кинематических цепи – ОАВ (левая часть механизма) и СВ (правая часть).
При заданном значении обобщенной координаты φ1 координаты точки А будут равны
xA = L1cosφ1 ,
yA = L1sinφ1 . (1)
Координаты точки В, принадлежащей левой части механизма, определятся как
xB = L2cosφ2 + xA,
yB = L2sinφ2 + yA. (2)
Эта система содержит три неизвестных (xB, yB, φ2) в двух уравнениях, поэтому не имеет самостоятельного решения.
Для открытой цепи, состоящей из стойки и звена ВС, можно записать следующие уравнения преобразования координат:
xB = L3cosφ3 + xC,
yB = L3sinφ3 + yC. (3)
И эта система не имеет самостоятельного решения, так как на два уравнения также приходится три неизвестных (xB, yB, φ3).
Отметим, что xB и yB для левой и для правой части – это разные неизвестные, поскольку после расчленения механизма обе части могут двигаться независимо. До расчленения четырехзвенника разомкнутая кинематическая пара (шарнир В) обеспечивала равенство координат точки В в обеих частях механизма. Исходя из этого составим уравнения связи кинематической пары В.
L2cosφ2 + xA = L3cosφ3 + xC
L2sinφ2 + yA = L3sinφ3 + yC (4)
Объединяя (2) и (4) или (3) и (4) получаем решаемую систему из четырех уравнений (неизвестные xB, yB, φ2, φ3)

Дифференцируя по времени исходные уравнения (1) … (4), точно так же можно составить систему уравнений относительно скоростей. Дифференцируя второй раз, получим задачу об ускорениях.
3. Динамический анализ механизмов
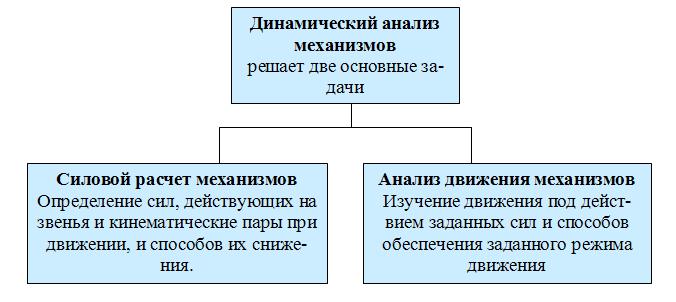
3.1. Основные динамические определения и соотношения
Вспомним основные определения и соотношения из курса теоретической механики, поскольку они лежат в основе динамического анализа механизма.
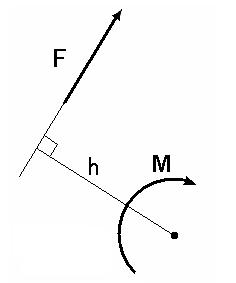
Рис. 1
Мерой взаимодействия тел является сила. Сила векторная величина, то есть характеризуется не только численным значением, но и направлением действия. Приложенная к материальной точке сила вызывает ускорение, определяемое по второму закону Ньютона F = ma. При действии нескольких сил используется основное уравнение динамики ∑F = ma. В проекции на оси координат

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)