Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
РОСЖЕЛДОР
Государственное образовательное учреждение высшего
«Ростовский государственный университет путей сообщения»
(РГУПС)
С. Б.Олешко
ПРИКЛАДНАЯ МЕХАНИКА
Учебно-методическое пособие
Ростов-на-Дону
2008 УДК 531:621(07)+06
Олешко, С. Б.
Прикладная механика : учебно-методическое пособие / С. Б.Олешко; Рост. гос. ун-т путей сообщения. – Ростов н/Д, 2008. – 42 с. : ил. Библиогр. : 7 назв.
Учебно-методическое пособие содержит курс лекций по дисциплине «Прикладная механика», включающей основные положения теоретической механики и теории механизмов и машин.
Предназначено для студентов специальности «Энергоснабжение железных дорог».
Рецензенты: д. ф.-м. н., проф. В. В. Ларченко (ДГТУ), д. т. н., проф. А. А.Демьянов (РГУПС).
Учебное издание
ПРИКЛАДНАЯ МЕХАНИКА
Учебно-методическое пособие
М Ческнокова
М.Чеснокова
Подписано в печать 28.09.2008. Формат 60×84/16.
Бумага офсетная. Ризография. Усл. Печ. Л. 2,5.
Уч.-изд. Л. 2,42. Тираж 100 экз. Изд. № 000. Заказ №
Ростовский государственный университет путей сообщения.
Ризография РГУПС.
Адрес университета: 344038, г. Ростов н/Д пл. Ростовского Стрелкового Полка Народного Ополчения, 2.
© Ростовский государственный университет путей сообщения
Содержание
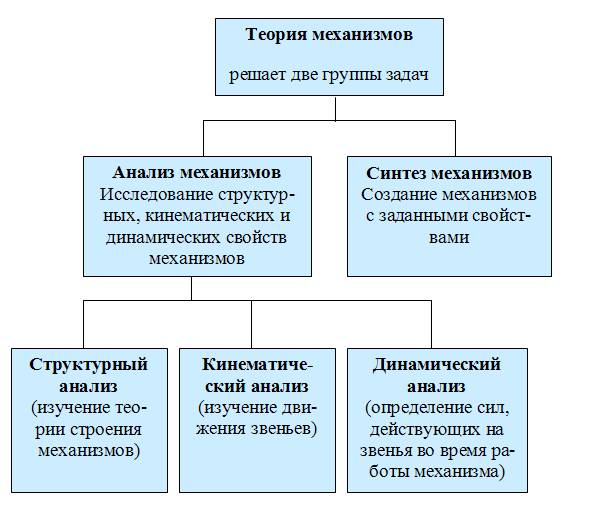
1 Структурный анализ
1.1. Теория механизмов
1.2. Общее понятие механизма
1.3. Звенья механизма
1.4. Кинематические пары
1.5. Кинематические цепи
1.6. Подвижность механизма
1.7. Закон образования механизмов по Асуру
1.8. Структурный анализ заданного механизма
2 Кинематический анализ
2.1. Задачи кинематики механизмов
2.2. Графические методы изучения кинематики механизмов
2.3. Метод планов
2.3.1. План положений механизма
2.3.2. Основные кинематические определения и соотношения
2.3.3. План скоростей механизма
2.3.4. План ускорений механизма
2.4. Аналитические методы изучения кинематики механизмов
2.4.1. Метод преобразования координат
3 Динамический анализ
3.1. Основные динамические определения и соотношения
3.2. Силовой расчет механизмов
3.2.1. Классификация действующих сил
3.2.2. Расчет сил в рычажных механизмах
3.2.3. Способы уменьшения сил, действующих на механизм
3.3. Анализ движения механизмов
3.3.1. Режимы движения механизма
3.3.2. Приведение сил и масс в механизме
3.3.3. Рычаг Жуковского
3.3.4. Неравномерное движение машин. Маховики
3.3.5. Регулирование непериодических колебаний скорости движения машин
ЛИТЕРАТУРА
структурный анализ
1.1. Теория механизмов
Теория механизмов – наука о строении, кинематике и динамике механизмов.
1.2. Общее понятие механизма
Самое общее определение механизма, не базирующееся на других понятиях:
Механизм – это совокупность взаимосвязанных твёрдых тел, предназначенная для преобразования движения одного или нескольких твёрдых тел на входе в заданные движения других твёрдых тел на выходе.
Данное определение объясняет назначение любого механизма, заключающееся в преобразовании движения, но не даёт точного понимания структуры этого механизма. В следующих разделах будет дано подробное описание структурных элементов механизма и способов их взаимодействия. В разделе «Кинематические цепи» будет дано определение механизма, описывающее его структуру и базирующееся на введённых понятиях.
1.3. Звенья механизма
Механизм состоит из отдельных деталей (тел). Несколько деталей могут объединяться в одну неизменяемую систему.
Звено – это одна или несколько деталей, движущихся как единое целое.
Звенья различают по конструктивным признакам (коленчатый вал, поршень, зубчатое колесо и т. д.) и по характеру движения – например:
§ кривошип – звено, вращающееся вокруг неподвижной оси на полный оборот;
§ рычаг – звено, совершающее вращательное движение вокруг неподвижной оси на неполный оборот;
§ коромысло – рычаг, вращающийся вокруг точки, располагающейся в середине рычага;
§ кулиса – рычаг, образующий с другим подвижным звеном (ползуном) поступательную пару;
§ шатун – звено плоского механизма, двигающееся плоско-параллельно;
§ ползун – звено, совершающее прямолинейное поступательное движение;
§ стойка – неподвижное звено механизма.
Для механизмов транспортных машин понятие неподвижности стойки условно, поскольку в этом случае сама стойка движется.
Различают входные и выходные звенья механизма:
Выходным называют звено, совершающее движение, для которого предназначен механизм;
Входным или начальным называют звено, которому сообщается движение, преобразуемое механизмом в требуемое движение выходного звена.
Степенью подвижности или степенью свободы твердого тела называется число независимых движений, которое может совершать это тело.
Любое движение свободного звена (т. е. не связанного с другими звеньями) можно разложить на шесть простых составляющих движений (на три поступательных движения вдоль осей координат и три вращательных движения вокруг этих осей). Таким образом, свободное звено имеет шесть степеней подвижности.
Ограничение подвижности звена определяется взаимодействием с другими звеньями механизма, следовательно, характер относительного движения подвижно-соединённых звеньев зависит только от мест их соединения.
1.4. Кинематические пары
Кинематической парой (сокращённо – парой) называют подвижное соединение двух соприкасающихся звеньев.
Всякая кинематическая пара ограничивает движение соединяемых звеньев.
Геометрическим элементом пары называется совокупность поверхностей, линий и точек звена, входящих в соприкосновение с другим звеном, образуя кинематическую пару
Чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута геометрическим (за счёт конструкции сочленения) или силовым (силой тяжести, пружиной, силой давления жидкости или газа) способом.
Для звена, подлежащего изучению в теории механизмов, характерным и главным являются форма геометрических элементов и их взаимное расположение на звене. Все другие факторы, как-то: материал, форма, конструкция звеньев, не отражают их относительного движения и поэтому не подлежат изучению в теории механизмов. Кроме того, в теории механизмов пренебрегают также малыми деформациями звеньев, т. е. рассматривают механизмы с абсолютно твердыми звеньями, в отличие от механизмов реальных, в которых происходят и деформации звеньев, и износ, и изменения номинальных размеров вследствие неточности их изготовления.
Ограничение, наложенное на движение твёрдого тела, называется условием связи.
Таким образом, кинематическая пара накладывает условия связи на относительное движение двух соединяемых звеньев. Очевидно, что наибольшее число условий связи, налагаемое кинематической парой, равно пяти.
Кинематические пары делятся на классы по числу условий связи, накладываемых на относительное движение звеньев. Пара k-того класса накладывает k условий связи, где k = {1,2,3,4,5}. Отсюда следует, что кинематическая пара k-того класса допускает в относительном движении звеньев (6 – k) степеней подвижности.
В механизмах применяются кинематические пары только пятого, четвертого и третьего классов. Кинематические же пары первого и второго классов не нашли применения в существующих механизмах.
Так как звенья соприкасаются геометрическими элементами, то, очевидно, кинематическая пара представляет собою совокупность таких элементов соединяемых звеньев. Отсюда следует, что характер относительного движения соединяемых звеньев зависит от формы геометрических элементов. Это относительное движение одного звена по отношению к другому может быть получено, если одно из двух соединяемых звеньев сделать неподвижным, а другому сообщить движение, допускаемое связями, накладываемыми кинематической парой.
Любая точка подвижного звена описывает в относительном движении траекторию, которую для краткости будем называть траекторией относительного движения. Если траектории относительного движения таких точек являются плоскими кривыми и располагаются в параллельных плоскостях, то пара называется плоской. В случае пространственных кинематических пар указанные траектории относительного движения представляют собою пространственные кривые.
Кроме разделения по классам, кинематические пары также делят в зависимости от типа геометрического элемента пары:
§ высшие пары – это пары, в которых при соединении двух звеньев контакт осуществляется лишь на кривых или точках;
§ низшие пары – это пары, в которых при соединении двух звеньев контакт осуществляется по поверхностям.
Высшие кинематические пары применяются для уменьшения трения в элементах этих пар и часто реализуются в качестве роликов или подшипников. Но особенности внутреннего строения таких элементов, в общем случае, не влияют на относительное движение соединяемых парой звеньев. Существуют также определённые приёмы, позволяющие заменять механизмы с высшими кинематическими парами их аналогами с низшими парами (что позволяет упростить исследование кинематики механизма в дальнейшем).
Низшие кинематические пары наиболее часто применяются на практике и имеют более простое внутреннее строение, по сравнению с высшими парами. Элемент низшей кинематической пары представляет собой две скользящие друг по другу поверхности, что, с одной стороны – распределяет нагрузку в этом элементе, а с другой стороны – увеличивает трение при относительном движении звеньев. В связи с этим, использование низших кинематических пар позволяет передавать значительную нагрузку от одного звена на другое, благодаря именно тому, что в этих парах звенья соприкасаются по поверхности.
В табл. 1 приведены примеры кинематических пар всевозможных классов. В таблице для каждой из пар указано её название, рисунок и условное обозначение на схеме. Далее приведены дополнительные пояснения для наиболее часто используемых пар из этой таблицы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)