Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Поступательным называется движение, при котором траектории, скорости и ускорения всех точек тела одинаковы. Тело движется без вращения, и любая прямая, принадлежащая телу, остается параллельной самой себе (рис. 4, а).
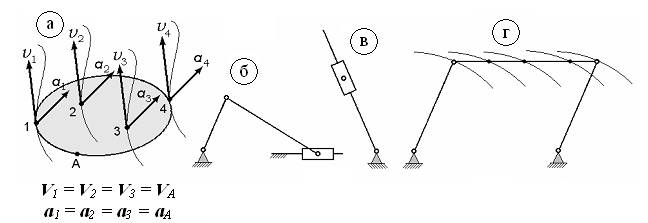
Рис. 4
Частный случай поступательного движения – прямолинейное движение. Траектории точек в этом случае прямые линии. Такое движение, например, совершает ползун относительно стойки (рис. 4, б), камень относительно кулисы (рис. 4, в). Другой частный случай – круговое поступательное движение. Здесь траектории всех точек – окружности. Так движется шатун шарнирного параллелограмма, причем сам шатун остается все время параллельным самому себе (рис. 4, г).
Вращательным называется движение, при котором одна точка тела неподвижна. Эта точка называется центром вращения (рис. 2.3, а). Для скорости и ускорения точки во вращательном движении установлены следующие соотношения:
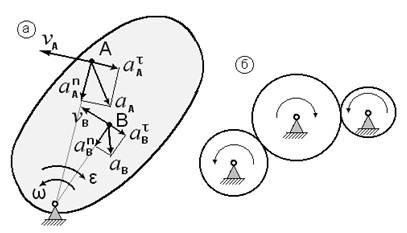
Рис. 5
VA = ω LOA,
aA = aAn + aAτ
аAn = ω2 LOA,
aAτ = ε LOA,
aA = LOA ![]() (ω4+ε2).
(ω4+ε2).
Скорость перпендикулярна радиусу вращения точки и направлена в сторону угловой скорости ω. Нормальное ускорение направлено к центру вращения, касательное ускорение перпендикулярно нормальному ускорению и направлено в сторону углового ускорения ε. Вращательное движение совершают кривошипы ОА и О1В (рис. 2), зубчатые колеса (рис. 5, б), кулиса (рис. 4, в).
Плоским или плоскопараллельным называется движение тела, при котором движение всех его точек происходит в плоскостях, параллельных одной плоскости. Следовательно, векторы скоростей и ускорений всех точек параллельны этой же плоскости. Плоское движение совершает шатун и колесо, катящееся по направляющей (рис. 6).
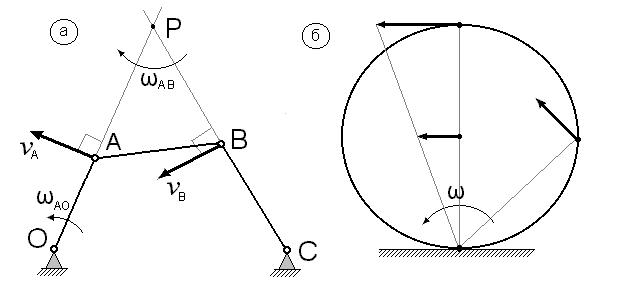
Рис. 6
Плоское движение можно представить как сумму поступательного движения вместе с какой-либо точкой и вращательного вокруг нее. Причем вращательное движение не зависит от выбора этой точки. Например, плоское движение шатуна можно разложить на поступательное вместе с точкой А и вращательное вокруг неё или поступательное вместе с точкой В и вращательное вокруг неё. Такое представление плоского движения позволяет рассчитывать скорости точек, используя законы сложного движения (см. ниже).
Плоское движение можно также представить как мгновенно вращательное вокруг точки, скорость которой в этот момент равна нулю. Этот мгновенный центр вращения находится на пересечении перпендикуляров к скоростям точек тела. Для шатуна АВ это точка Р (рис.6, а). Для колеса (рис.6, б) – это точка К (точка касания с неподвижной направляющей). Такое представление плоского движения позволяет рассчитывать скорости точек по законам вращательного движения.
Сложным называется движение, получаемое сложением двух движений, одно из которых называется переносным (вместе с подвижной системой), другое – относительным (в этой системе). Примером сложного движения может служить движение камня кулисы (рис. 7): вместе с кулисой совершается переносное движение, вдоль кулисы – относительное.
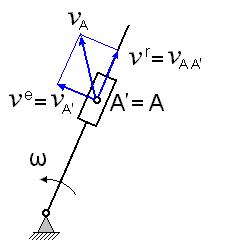
Рис. 7
Скорость точки в сложном движении равна геометрической сумме переносной ve и относительной vr скоростей.
VA = V е + V r.
Если обозначить точку подвижной системы, в данный момент, совпадающую с точкой А, совершающей сложное движение, той же буквой, но со штрихом (А΄), то можно дать следующие определения переносной и относительной скоростям. Переносная скорость это скорость точки А΄. Относительная скорость - это скорость точки А относительно точки А΄. На основании введенных определений скорость точки А можно записать так:
VA= VA' + VAA' (2.1')
Например, при движении камня кулисы его скорость VA складывается в соответственно из скорости VA' точки А' кулисы, совпадающей с точкой А камня, обусловленной вращательным движением кулисы, и скорости VAA' камня относительно кулисы.
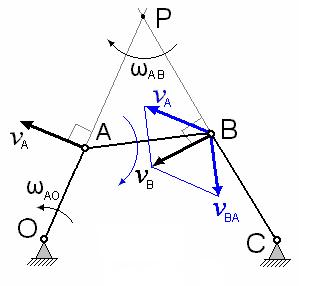
Рис. 8
При расчете плоского движения (рис. 8) те же формулы выглядят несколько иначе. Выбрав точку А в качестве полюса (вокруг которого происходит вращение в относительном движении), скорость произвольной точки В можно определить как векторную сумму скорости этого полюса (переносная скорость) и скорости точки В в её движении вокруг точки A (относительная скорость).
VВ = VА + VBА.
Ускорение, в сложном движении определяется на основании теоремы Кориолиса.
Ускорение точки равно геометрической сумме переносного, относительного и поворотного (кориолисова) ускорений.
aA = a e + a r + a k.
Переносное ускорение – зто ускорение точки А', относительное – это ускорение точки А относительно точки А'. Тогда формулу для ускорения можно представить так
aA = aA' + aAA' + a k.
Кориолисово ускорение отражает, с одной стороны, изменение направления вектора относительной скорости из-за поворота переносной системы, а с другой – изменение величины переносной скорости из-за увеличения радиуса вращения точки А' вследствие относительного движения. Из этого следует, что кориолисово ускорение возникает только при вращательном переносном движении.
Величина кориолисова ускорения для плоского движения определяется по формуле:
ak = 2 ω VAA',
где ω – угловая скорость переносной системы.
Направление этого ускорения находится по правилу Жуковского.
Направление кориолисова ускорения получается поворотом вектора относительной скорости VAA' на 90˚ в сторону вращения переносной системы.
Очевидно, что если ω = 0 (переносное движение поступательное) или VAA' = 0 (относительное движение отсутствует, то есть, нет сложного движения), то кориолисово ускорение будет равно нулю.
Приведенные выше формулы находят применение при анализе сложного движения кулисного камня. Переносное движение осуществляет кулиса; относительное движение есть прямолинейное движение камня по направляющей кулисы (рис. 9).
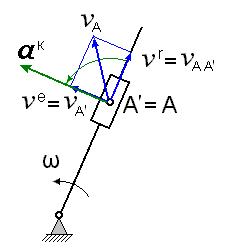
Рис. 9
Направление кориолисова ускорения получается поворотом относительной скорости на 900 в направлении вращения переносной системы (кулисы).
При плоском движении переносное движение поступательное, а относительное – вращательное. В этом случае кориолисово ускорение равно нулю, и расчет ускорений упрощается. Выбрав точку А в качестве полюса (вокруг которого происходит вращение в относительном движении) ускорение произвольной точки В можно определить как векторную сумму ускорения этого полюса aB (переносная ускорение) и ускорения точки В в её движении вокруг точки А (относительная ускорения).
aA= aB + aAB
2.3.3. План скоростей механизма
Планом скоростей механизма называется плоский пучок лучей, изображающих в масштабе абсолютные скорости его точек. Отрезки, соединяющие концы лучей, изображают относительные скорости точек.
Построим план скоростей шарнирного четырехзвенника (рис. 10, а). Исходными данными для его построения является план положений (рис. 10, б) и угловая скорость начального звена (кривошипа ОА).
Определим скорость точки А кривошипа по формуле VA = ω1 LOA.
Выберем масштабный коэффициент плана скоростей kv и изобразим скорость точки А в масштабе лучом pa, проведенным из полюса p в направлении скорости. Скорость точки В определится векторным уравнением
VB = VA + VBA .
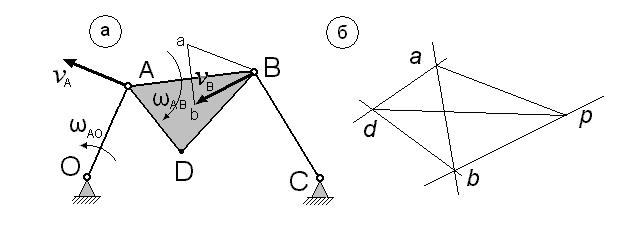
Рис. 10
Поскольку векторное уравнение соответствует двум скалярным уравнениям, то при его решении находятся два неизвестных. В данном случае это величина скорости VBA и величина скорости VB. Решим уравнение графически (рис.10. б). Точка b плана скоростей находится на пересечении прямых ab и bc, проведенных перпендикулярно звеньям АВ и ВС соответственно (используется то, что скорость при вращательном движении перпендикулярна радиусу вращения). Скорость точки В соответствует отрезку pb в масштабе kv. Аналогично находится на плане скоростей и точка d.
Графическое решение уравнения скорости VB =VA + VBA непосредственно на механизме показано на рис. 10, а.
План скоростей обладает рядом свойств.
Скорость любой точки механизма изображается на плане скоростей направленным отрезком, начинающемся в полюсе p, и заканчивающемся в точке, обозначенной той же буквой.
VA = kv pa, VB = kv pb, VD = kv pd.
Относительная скорость любой точки механизма изображается на плане скоростей направленным отрезком, начинающемся в точке, относительно которой определяется скорость, и заканчивающемся в точке, обозначенной той же буквой.
VВA = kv ab, VAB = kv ba, VDA = kv ad, VAD = kv da.
Угловая скорость любого звена находится как отношение скорости одной точки звена относительно другой точки этого же звена к длине звена.
ωВА = VBA/LBA = kv ab/LBA.
Направления угловых скоростей звеньев определяются направлениями соответствующих относительных скоростей.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)