Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
∑Fx = max
∑Fy = may.
В соответствии с теоремой о движении центра масс, твердое тело можно мысленно стянуть в центр тяжести, представив материальной точкой, которая движется под действием тех же сил, что и исходное тело. Этого достаточно для определения перемещения центра тяжести. Однако, сила, приложенная к телу, может не только перемещать центр тяжести, но и вращать тело вокруг него.
Вращательная характеристика действия силы называется моментом силы. Момент силы равен произведению величины силы на плечо M = ± Fh (рис. 1). Плечо – кратчайшее расстояние от центра вращения до линии действия силы. Знак момента определяется его направлением. Угловое ускорение вращения определяется из уравнения, являющегося следствием теоремы об изменении кинетического момента ∑M = Jε. Его суть аналогична основному уравнению динамики, поскольку оно также связывает результат воздействия (угловое ускорение ε) с мерой воздействия (моментом M) через инерциальные свойства тела (момент инерции J).
Если тело неподвижно, то это означает, что выполняются три условия:
∑Fx = 0 – сумма горизонтальных составляющих действующих сил равна нулю;
∑Fy = 0 – сумма вертикальных составляющих действующих сил равна нулю;
∑M = 0 – суммарный момент действующих сил относительно любой точки равен нулю.
В этих выражениях должны быть учтены все силы, действующие на тело, в том числе и реакции связей.
Связью называется любое другое тело, ограничивающее свободу перемещения рассматриваемого объекта. Ее реакции действуют по направлениям, в которых связью накладывается запрет на перемещение.
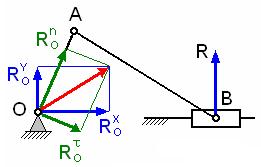
Рис. 2
Например, для кривошипно-шатунного механизма (рис. 2) связями являются шарнирное соединение со стойкой в точках О и В. Реакция в шарнире О может быть представлена в виде двух составляющих, направленных вдоль осей координат (шарнир запрещает перемещаться в этих направлениях, но позволяет вращаться вокруг своей оси). В точке В связью являются направляющие ползуна, которые дают реакцию, перпендикулярную направлению движения ползуна. Иногда удобно составляющие реакции шарнира представить в виде двух составляющих, направленных вдоль (Rτ) и поперек (Rn) рассматриваемого звена.
Масса тела m и момент инерции J – суть инерционные характеристики тела в поступательном и вращательном движении соответственно. Для однородного стержня (а именно так будем представлять рычаги механизма) момент инерции относительно центра тяжести определяется как JС = mL2/12, а относительно одного из концов – J = mL2/3.
Инерция проявляет себя как сила. Силы инерции, действующие на каждую элементарную частицу тела, можно заменить их главным вектором Fи и главным моментом Ми, величина которых вычисляется через инерциальные характеристики тела и соответствующие ускорения:
FИ = - maс и МИ = - Jcε, где ac – ускорение центра тяжести, а Jc – момент инерции относительно центра тяжести.
Главный вектор и главный момент сил инерции направлены навстречу соответствующим ускорениям, именно это и означает знак минус в приведенных формулах.
В любой момент времени заданные силы, действующие на тело, силы реакции связей и силы инерции взаимно уравновешиваются.
В этом суть принципа Даламбера. Применение этого принципа позволяет динамические системы рассчитывать методами статики. Такой расчет называется кинетостатическим.
При оценке механического взаимодействия при движении используется понятие работы.
Работой силы называется скалярное произведение вектора силы на вектор перемещения точки её приложения за время, пока сила может считаться постоянной.
A = F S = F S cosα
Если сила переменная, то, разбивая перемещение на элементарные участки dS, можно вычислить элементарную работу силы на каждом из них, а затем просуммировать (взять интеграл):
Можно вычислять работу через момент силы.
Работа момента равна произведению момента силы на угол поворота под действием этого момента, пока момент может считаться постоянным.
A = M φ
Если момент изменяется, то, разбивая перемещение на элементарные участки dφ, можно вычислить элементарную работу силы на каждом из них, а затем просуммировать (взять интеграл):
.
Работа положительна, если сила или момент действуют, помогая движению, разгоняют механическую систему, и наоборот, работа отрицательна, если сила или момент противодействует движению, тормозят его. Это вытекает из теоремы об изменении кинетической энергии.
Изменение кинетической энергии механической системы равно сумме работ внешних и внутренних сил, приложенных к этой системе.
ΔT = ∑A
Кинетическая энергия системы определяется как сумма кинетических энергий ее элементов, вычисляемых в зависимости от вида движения.
Для поступательного движения – T = 0,5mv2.
Для вращательного движения – T = 0,5Jω2.
Поскольку плоско-параллельное движение можно представить в виде суммы поступательного движения вместе с центром тяжести и вращения вокруг него, то кинетическая энергия для этого вида движения определится как
T = 0,5mvс2 + 0,5Jсω2.
В первой части формулы берется скорость центра тяжести, а во второй части – момент инерции тела относительно центра тяжести.
3.2. Силовой расчет механизмов
Силовой расчет механизмов заключается в определении сил, действующих на отдельные звенья при их движении. Есть много способов силового расчета механизмов. Все они начинаются с составления расчетной схемы и изображения действующих сил. Поэтому начнем с рассмотрения сил, действующих на механизмы.
3.2.1. Классификация действующих сил
Среди сил, действующих на механизм, различают следующие.
Движущие силы Fд или моменты Mд, ускоряющие движение входных звеньев (а следовательно, всего механизма) и совершающие положительную работу. Например: силы давления газа на поршень в двигателе внутреннего сгорания, силы тяжести при опускании груза и т. д.
Силы сопротивления Fc или моменты Мс, замедляющие движение входных звеньев и совершающие отрицательную работу. Они могут быть силами полезного сопротивления, дающими производственный эффект, и силами вредного сопротивления не дающими такого эффекта. К первому типу относятся, например, силы тяжести при подъеме груза, а ко второму типу – силы трения.
Силы реакции связей Fij, возникающие в кинематических парах. Эти силы являются внешними для каждого отдельного звена и внутренними для механизма в целом, поэтому влиять на движение механизма они не могут.
Силы инерции Fи или моменты сил инерции Mи возникают при переменном движении звеньев механизма и могут быть как движущими, так и силами сопротивления (при замедлении движения механизма силы инерции являются движущими, а при разгоне превращаются в силы сопротивления).
3.2.2. Расчет сил в рычажных механизмах
Зная активные силы, действующие на звенья механизма и силы инерции этих звеньев, можно произвести его кинетостатический расчет, т. е. определить реакции в кинематических парах и уравновешивающую силу (момент) на входном звене. Эта сила (момент) является движущей при совпадении ее направления с направлением движения входного звена или силой (моментом) сопротивления, если ее направление противоположно этому движению.
Уравновешивающей силой (моментом) называется сила (момент), которую необходимо приложить к входному звену для обеспечения его равномерного движения.
Для входного звена, совершающего поступательное движение (например, поршень двигателя внутреннего сгорания), определяется уравновешивающая сила. Для входного звена, совершающего вращательное движение (например, кривошип), определяется уравновешивающий момент.
При кинетостатическом расчете используется принцип Даламбера, позволяющий решение задачи динамики свести к статическому расчету. Согласно этому принципу, приложение к механической системе сил инерции приводит её в равновесие. Поэтому неизвестные силы определяются из уравнений статики.
Определение сил инерции основывается на данных, полученных при кинематическом анализе. Поэтому при его проведении необходимо предусмотреть нахождение ускорений центров тяжести всех звеньев.
Механизм расчленяется на структурные группы Ассура и начальные звенья. Расчет ведется, начиная с последней структурной группы, и заканчивается расчетом входного звена. Здесь надо отметить, что расчленение механизма на отдельные звенья нецелесообразно, так как для каждого звена количество неизвестных всегда больше возможного числа уравнений равновесия, и для решения надо будет объединять по два или более звена (в зависимости от структуры механизма) и составлять для полученных систем свои уравнения равновесия. Наиболее рациональное объединение звеньев в такие системы соответствует группам Асура в структуре механизма.
Расчет каждой группы Асура ведется в следующей последовательности.
§ Составляется расчетная схема. Изображается структурная группа в заданном положении и затем показываются все внешние для этой группы силы. Изображение внешних сил желательно (но необязательно) проводить в следующей последовательности:
- заданные силы (эти силы могут быть как движущими, так и силами сопротивления). К заданным силам следует относить реакции в кинематических парах с уже рассчитанными структурными группами;
- силы тяжести звеньев;
- реакции связей (реакции в шарнирах удобно представлять в виде составляющих, направленных поперечно и продольно по отношению к оси шарнира);
- силы инерции звеньев (главные векторы и главные моменты).
§ Определяются поперечные к оси рычага составляющие реакции крайних кинематических пар. Для этого составляются уравнения равновесия в моментах относительно другой кинематической пары поводка.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)