Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Мпр ωпр = ∑ Fk vk cos(Fk^vk)
Мпр = ∑ Fk vk cos(Fk^vk) /ωпр
Fпр vпр = Мпрωпр
В качестве примера приведения сил к начальному звену рассмотрим кривошипно-шатунный механизм (рис. 8). Движение происходит в режиме выбега. На механизм действуют силы: сила полезного сопротивления F и сила тяжести шатуна G.
Рассчитаем приведенную силу приложенную к точке А кривошипа.
Fпр vа = ∑ Fk vk cos(Fk^vk) = – F vb + G vs cos(G^vs).
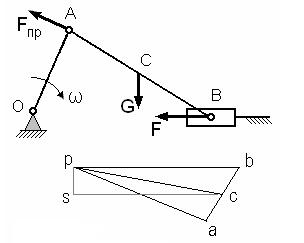
Рис. 8
Величину скоростей возьмем из предварительно построенного плана скоростей. Заметим, что из плана скоростей берется величина отрезков, изображающих скорости, так как масштаб скоростей при подстановке сокращается. Произведение скорости на косинус угла между скоростью и силой определяется графически как проекция скорости на направление силы
vа = pa, vb = pb, vs cos(G^vs) = ps.
Fпр = – F pb/ pa + G ps/ pa.
Приведенный момент будет равен
Мпр = Fпр OA.
Направление приведенной силы или момента в данном случае будет навстречу движению кривошипа, так как их величина отрицательна (сила полезного сопротивления значительно больше силы тяжести).
Затем рассчитываются инерционные характеристики звена приведения (масса или момент инерции) из условия равенства кинетической энергии звена приведения и исследуемого механизма в любой момент времени.
Каждое звено движущегося плоского механизма, двигаясь плоско-параллельно, в общем случае обладает кинетической энергией
Tk = 0,5mk vсk2 + 0,5Jсkωk2.
В частном случае поступательного движения ω= 0, в частном случае вращательного движения vс = 0. Кинетическая энергия всего механизма определяется суммированием по всем звеньям
Tмех = ∑(0,5mk vсk2 + 0,5Jсkωk2).
Определение инерционных характеристик звена приведения производится из условия равенства кинетических энергий звена приведения и всего механизма Tпр = Tмех.
Если звено приведения движется поступательно (ползун), то его кинетическая энергия будет
Tпр = 0,5mпрvпр2. Тогда mпр = ∑[ mk (vсk /vпр)2+Jсk(ωk/vпр)2].
Если звено приведения движется вращательно (кривошип), то кинетическая энергия Tпр = 0,5Jпрωпр2, и приведенный момент инерции будет равен
Jпр = ∑[mk(vсk /ωпр)2+ Jсk(ωk /ωпр)2].
Следует подчеркнуть, что все приведенные характеристики (как силовые, так и инерционные) являются функциями положения звена приведения, т. е. их величина меняется при изменении положения звена в процессе его движения.
3.3.3. Рычаг Жуковского
Как говорилось выше, вычисление приведенной силы Fпр, основано на равенстве мощностей:
Fпр vпр = ∑Fk vk cos(Fk^vk).
Н. Е Жуковский предложил способ определения приведенной силы, суть которого заключается в следующем.
Рассмотрим какое-либо звено механизма, в точке А которого приложена сила F под углом α к вектору скорости vа этой точки (рис. 9, а). Её мощность равна P = F vа cosα.
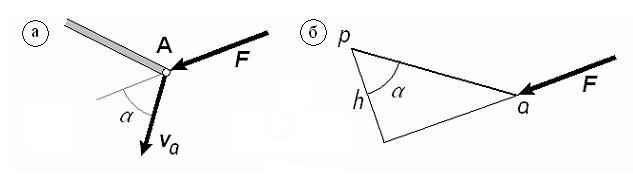
Рис. 9
Если вектор скорости точки А на плане скоростей повернуть на 90˚ и силу F приложить к концу вектора vа (в точке a), сохранив ее направление (рис. 9, б), то момент этой силы относительно полюса p будет равен её мощности
M = F h = F va cosα.
Таким образом, общую мощность действующих на механизм сил можно найти, повернув на 90˚ план скоростей и приложив к нему в соответствующих точках все силы (сохраняя их направления), а затем вычислив их суммарный момент относительно полюса плана скоростей. Поворачивать план скоростей можно в любую сторону.
Жесткая фигура, полученная поворотом плана скоростей на 90˚, с приложенными к нему силами, действующими на механизм, называется рычагом Жуковского.
Применение рычага Жуковского позволяет легко определять приведенную силу.
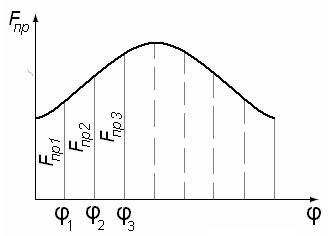
Рис. 10
Fпр = ∑Fi hi /hпр,
где hi и hпр – плечи i-ой и приведенной сил.
Величина Fпр или Мпр зависит от положения механизма, поэтому можно построить диаграмму являющуюся функцией положения звена приведения. В качестве примера на рис. 10 показана диаграмма Fпр(φ) некоторого механизма как функция угла поворота начального звена за один цикл. Для этого необходимо последовательно определить значения Fпр методом рычага Жуковского для целого ряда положений механизма в пределах цикла (Fпр1, Fпр2,…) и отложить их на диаграмме.
Приведенная сила Fпр или момент Мпр характеризует реакцию механизма на движение его входного звена, задаваемое двигателем.
Сила (или момент), равная по величине приведенной силе (или моменту), но противоположная им по направлению называется уравновешивающей силой Fур (или моментом Мур).
Эта сила или момент развивается двигателем и обеспечивает заданное движение входного звена.
Если к рычагу Жуковского приложить все внешние силы, включая силы инерции, а также Fур, то его можно рассматривать в равновесии, из условия которого
Fур·hур+∑Fi·hi=0
можно определить неизвестную Fур, а также найти мощность двигателя Pдв, требуемую для получения заданного движения входного звена в заданном положении:
Pдв=Fур·VA·cos(FурVA)=Mур·ω.
Помимо нахождения приведенной силы рычаг Жуковского можно использовать при определении сил, действующих на механизм, по заданной уравновешивающей силе.
3.3.4. Неравномерное движение машин. Маховики
Одним из режимов движения машины при совершении полезной работы является режим установившегося движения. При установившемся движении угловая скорость ω вала двигателя периодически изменяется (рис. 6). Степень неравномерности можно оценить коэффициентом неравномерности (рис. 11)
δ = (ωmax - ωmin) / ωcр.
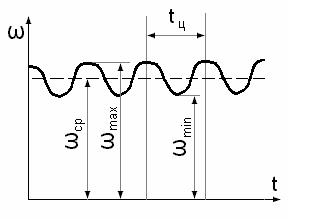
Рис. 11
Неравномерность вредно сказывается на работе машин, так как вызывает дополнительные инерционные нагрузки.
Практикой установлены значения δ, которые допустимы в различных условиях эксплуатации (см. табл.).
Допустимый коэф. неравномерности | |
Насосы | 1/5…1/30 |
Металлообрабатывающие станки | 1/20…1/50 |
Компрессоры | 1/50…1/100 |
Двигатели внутреннего сгорания | 1/80…1/100 |
Генераторы постоянного тока | 1/100…1/200 |
Генераторы переменного тока | 1/200…1/300 |
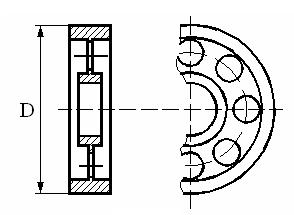
Рис. 12
Обеспечить необходимую величину δ можно путем увеличения приведенного момента инерции механизма. Это осуществляется посадкой на одну ось с вращающимся звеном дополнительной детали, называемой маховиком и имеющей заданный момент инерции. Конструктивно маховики выполняются в виде тяжелого обода, соединенного со втулкой тонким диском с отверстиями или спицами (рис. 12) для обеспечения максимального момента инерции при заданном диаметре и наименьшем весе.
3.3.5. Регулирование непериодических колебаний скорости движения машин
В процессе выполнения работы приходится регулировать скорость рабочего органа машины. Например, в стационарных двигателях необходимо поддерживать скорость рабочего органа постоянной, а в двигателях транспортных машин эта скорость должна изменяться в широких пределах.
Из уравнения движения машины следует, что изменения скорости рабочего органа можно достигнуть за счет изменения разности работ движущих сил и сил сопротивления (Ад-Ас).
Устройства, обеспечивающие изменения работы сил сопротивления, применяются в виде тормозов, например, в транспортных машинах, которые снабжаются также и приспособлениями для одновременного разобщения двигателя с остальным механизмом машины.
Другим способом регулирования является изменение работы движущих сил путем воздействия на орган, подающий энергию к входному звену (поршню у двигателя внутреннего сгорания, лопаткам турбины и т. д.).
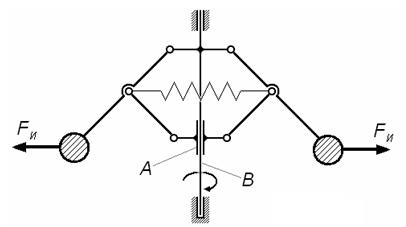
Рис. 13
Регулирование может осуществляться либо человеком-оператором, либо автоматически – с помощью устройств, называемых регуляторами.
Одним из них является центробежный регулятор (рис. 13), приводимый во вращение валом двигателя В. Ползун А соединяется с органом, подводящим рабочее тело (пар, горючая смесь и т. д.). Регулятор автоматически поддерживает скорость вала двигателя постоянной, т. к. ее увеличение приводит к уменьшению подачи рабочего тела и наоборот.
Литература
1. Ф. Основы теоретической механики : Учеб. для вузов. – 2-е изд., перераб. и доп. – М. : Изд-во МГУ, 2000. – 719 с.
2. М. Краткий курс теоретической механики : Учеб. для втузов. – 13-е изд., стер.– М. : Высш. Шк., 2008. – 416 с.
3. И. Теория механизмов и машин : Учеб. для втузов. – 4-е изд., перераб. и доп. – М. : Наука, 1988. –639 с.
4. Теория механизмов и механика машин / Под ред. К. В. Фролова : Учеб. для втузов. – 5-е изд., стер.– М. : Высш. Шк., 2005. – 496 с.
5. И. Теория механизмов и машин : Учеб. пособие для ун-тов и втузов. – 2-е изд., перераб. и доп. – М. : Наука, 1990. –590 с.
6. Е., С. Теория механизмов и машин : Решение задач по структуре, кинематике и кинетостатике плоских рычажных механизмов. – Киев : Вища школа, 1977. – 49 с.
7. Демьянов Ал. Ал., Демьянов Ал. Ан., Г. Анализ и синтез плоских механизмов : Метод. указ. к кур. работе по дисциплине «Теория механизмов и машин» для студентов немеханических специальностей оч. И заоч. Форм обучения. – Ростов н/Д : РГУПС, 2007. – 23 с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)