

Требования к системам ГМН представлены табл. 2.
Таблица 2
Требования к системам ГМН
Требования | Методы геомагнитной навигации | |
КЭН | ДГМН | |
К подготовке и использованию высокоточной детальной широкомасштабной цифровой карты аномального геомагнитного поля (КП) с координатной привязкой точек к цифровой карте местности (КМ) | Требуется (КП+КМ) | Не требуется Необходимо вместо КП задание дискретной широкомасштабной геомагнитной сетки (ГМС) базовых точек с координатной привязкой к КМ. В качестве ГМС может быть использована стандартная модель IGRF. |
К априорной информации по объему, детальности, масштабности и точности | Жесткие | Мягкие |
К радиусам корреляции (поиска, поправок) | Ограничены сверху (Дr ≤ сmax ≈ 10 м) | Ограничены снизу (Дr ≥ сmin ≈ 100 м) |
К локализации и масштабности решения задачи ГМН | Ограничены условием выбора радиуса корреляции с | Не ограничены, обеспечиваются правильным выбором шага (дискретности) ГМС при любой ее масштабности |
К магнитометрическим измерителям: – по порогу чувствительности, нТл/м | ∇В ≤ 10–5 | ДВ ≤ 10–1 (ДК ГМН) |
– по предельно допустимым погрешностям измерений, нТл | δВ ≤ 10–4–10–5 | δВi ≤ (2…5)⋅10–1 (ДК ГМН) |
К АЦП и микроконтроллеру: – по объему памяти, разрядности и быстродействию | Большой объем памяти ПЗУ, ОЗУ, большая длина разрядной сетки и высокое быстродействие | Объем памяти ПЗУ, ОЗУ, длина разрядной сетки и быстродействие умеренные |
Из анализа табл. 1 и 2 видно, что по многим показателям применяемый на практике метод КЭН уступает предлагаемому в качестве альтернативы методу ДГМН (в частности, ДК ГМН).
Программно-алгоритмическое обеспечение метода ДК ГМН сводится к программной реализации в бортовом микроконтроллере пошагового вычислительного процесса в соответствии со следующими алгоритмами:
| (1) |
| (2) |
| (3) |
| (4) |
| (5) |
где Т – вектор напряженности результирующего магнитного поля, измеряемого с помощью трехосного блока магнитометров (ТБМ); ТМПЗ, ![]() – векторы напряженностей МПЗ, регистрируемых в контрольной и базовой точках;
– векторы напряженностей МПЗ, регистрируемых в контрольной и базовой точках; ![]() – вектор напряженности магнитного поля Земли, вычисленный по показаниям ТБМ и приведенный к осям географического трехгранника
– вектор напряженности магнитного поля Земли, вычисленный по показаниям ТБМ и приведенный к осям географического трехгранника ![]() в контрольной точке маршрута; B, M – матрица сборки ТБМ и монтажа (установки) его на ПО,
в контрольной точке маршрута; B, M – матрица сборки ТБМ и монтажа (установки) его на ПО, ![]() ; S – матрица коэффициентов Пуассона,
; S – матрица коэффициентов Пуассона, ![]() ; E – единичная матрица,
; E – единичная матрица, ![]() ;
; ![]() ,
, ![]() ,
, ![]() – матрицы
– матрицы ![]() ориентации ПО по углам крена (г), тангажа (
ориентации ПО по углам крена (г), тангажа (![]() ) и курса (ш); P, Q, R – компоненты магнитного поля объекта (МПО), характеризующие постоянную намагниченность ПО; ДТМПЗ – разностный вектор МПЗ; r, r0 – радиусы-векторы контрольной (текущей) и базовой точек; Дr – радиус корреляции координат позиционирования контрольной точки маршрута относительно базовой точки с разностным вектором ДТМПЗ (радиус-вектор поправки); G – тензор градиентов МПЗ по компонентам,
) и курса (ш); P, Q, R – компоненты магнитного поля объекта (МПО), характеризующие постоянную намагниченность ПО; ДТМПЗ – разностный вектор МПЗ; r, r0 – радиусы-векторы контрольной (текущей) и базовой точек; Дr – радиус корреляции координат позиционирования контрольной точки маршрута относительно базовой точки с разностным вектором ДТМПЗ (радиус-вектор поправки); G – тензор градиентов МПЗ по компонентам, ![]() ; F – матрица функций чувствительностей Дr к ДТМПЗ,
; F – матрица функций чувствительностей Дr к ДТМПЗ, ![]() . Причем
. Причем
| (6) |
 ,
,
| (7) |
| (8) |
 ,
,
| (9) |
Уравнение Пуассона (1) и выражения (6), (7), (9) составляют ядро решения прямой задачи бортовой магнитометрии, соответствующей условию формирования показаний ТБМ (Т) в зависимости от внешних и внутренних факторов, а выражения (2)–(8) составляют основу решения обратной задачи бортовой магнитометрии, используемую для формирования алгоритмов ДК ГМН.
Выбор формы, размеров (Дц, Дл) и числа конечных элементов ДS, характеризующих формирование ГМС на территории навигации S (см. рис. 1), определяется масштабами и условиями навигации, а также требованиями к точности позиционирования базовых и контрольных точек. Численные значения элементов матриц B, M, S и вектора ![]() устанавливаются до реализации ПЗ технологическим путём за счёт проведения полуаналитических калибровок и юстировок ТБМ на объекте.
устанавливаются до реализации ПЗ технологическим путём за счёт проведения полуаналитических калибровок и юстировок ТБМ на объекте.
Из анализа выражения (8) видно, что матрица функций чувствительностей F (3×3), с помощью которой обеспечивается формирование в численном виде компонент радиуса-вектора поправки
![]() ,
,
в свою очередь, однозначно определяется только свойствами (градиентами) компонент МПЗ (F = G–1). С учетом этого матрицы функций чувствительностей F для произвольных точек околоземного пространства могут быть вычислены заранее по данным полетного задания для выбранного маршрута.
Для примера выбраны два глобальных маршрута:
- широтно-меридиональный (л=+45°30' в. д.; л=-134°30' з. д.); долготно-экваториальный (ц=+51°00' с. ш.),
проходящих через географическую точку, соответствующую географической точке местоположения г. Саратова. С использованием готовой программы EMM (2016 г.) проведены расчеты параметров МПЗ для точек выбранных маршрутов. Результаты расчетов представлены в виде графиков (рис. 2–4).
Располагая конкретными графиками зависимостей параметров МПЗ от географических координат (ц, л, h), построенными в соответствии с полетным заданием для базовых и контрольных точек программной траектории (расчетного маршрута), становится возможным определить априорно исходные данные в численном виде как по координатам базовых точек ГМС, так и по компонентам (![]()
![]() ,
, ![]() ), градиентам (
), градиентам (![]() ,
,![]() ,
,![]() ) МПЗ и матрицам функций чувствительностей F0 (3×3) для выделенных базовых точек.
) МПЗ и матрицам функций чувствительностей F0 (3×3) для выделенных базовых точек.
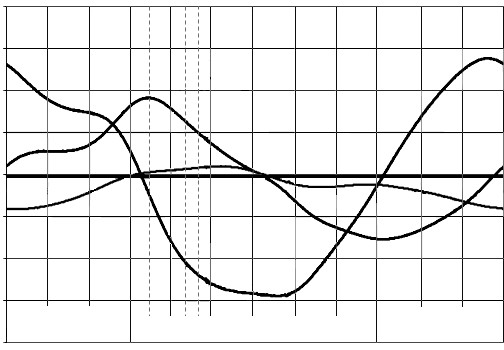
Рис. 2. Зависимости составляющих геомагнитного поля от широты при движении объекта вдоль меридиана с долготой л = 45°30' в. д., л = –134°30' з. д.
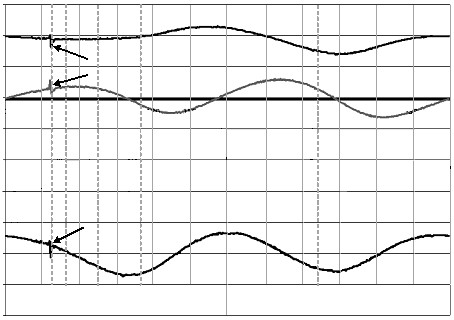

Рис. 3. Зависимости составляющих геомагнитного поля от долготы при движении объекта вдоль параллели с широтой ц=51°00' с. ш.


|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
