


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
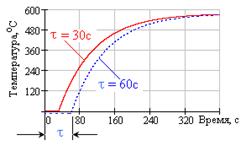
Рис. 1.9. Модели 1-го порядка с различными запаздываниями
Расчет приращения (по отношению к значению в «старой» статике) выхода объекта по (1.3) как реакции на входное воздействие, изменяющееся скачком при t = 0 (![]() ) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
 , (1.4)
, (1.4)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики.
Область применимости модели (1.3), естественно, шире, чем модели (1.1), поскольку величина запаздывания учитывается непосредственно. Успех применения (1.3) зависит от того, насколько гладкой является начальная часть динамического процесса в объекте (рис. 1.10). Если процесс начинается «резво», т. е. производная в момент t = τ быстро возрастает, то модель (1.3) имеет хорошую точность (рис. 1.10а). При гладком начале динамического процесса точность модели ухудшается (рис. 1.10б).
а) если процесс в объекте начинается с высокой скоростью, не гладко, то аппроксимация моделью первого порядка с запаздыванием вполне пригодна | б) если начальная часть процесса в объекте гладкая, то аппроксимация моделью первого порядка с запаздыванием теряет точность |
Рис. 1.10. Иллюстрация к условиям применимости модели 1-го порядка с запаздыванием
3.2.3. Модель в форме дифференциального уравнения 2-го порядка с действительными характеристическими числами (апериодическое звено 2-го порядка). Для того чтобы гарантировать отсутствие комплексно сопряженных характеристических чисел, дифференциальное уравнение задается в специальной форме:
![]() , (1.5)
, (1.5)
где T1 и T2 – две постоянные времени модели, размерность [T1] = [T2] = с, T1 ≠ T2 (без ограничения общности будем обозначать постоянные времени так, что T1 > T2);
остальные обозначения такие же, как в формуле (1.3).
Пояснение: характеристические числа рассчитываются по уравнению:
 ,
,
отсюда
![]() . (1.6)
. (1.6)
Значения характеристических чисел получились действительными. Они порождают два переходных процесса в форме экспонент с постоянными времени T1 и T2.
Общая инерционность (т. е. время, необходимое для перехода от «старой» к «новой» статике) определяется суммой постоянных времени, а степень гладкости начального участка переходного процесса – соотношением между ними. Мы видим (рис. 1.11), что при существенно различных постоянных времени начальная часть процесса менее гладкая, чем при близких значениях.

Рис. 1.11. Чем более близки значения Т1 и Т2, тем более гладкой является начальная часть процесса в апериодической модели 2-го порядка без запаздывания
Расчет приращения (по отношению к значению в «старой» статике) выхода объекта по (1.5) как реакции на входное воздействие, изменяющееся скачком при t = 0 (![]() ) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
 , (1.7)
, (1.7)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики.
Как и при использовании модели (1.1), применимость модели (1.5) зависит (рис. 1.12) от соотношения между запаздыванием и инерционностью объекта. Если запаздывание невелико по сравнению с периодом достижения статического режима, то модель (1.5) применима (рис. 1.12а).
Область применимости модели (1.5) шире, чем модели (1.1), т. к. гладкий участок начальной части процесса в (1.5) может имитировать запаздывание (в модели (1.1) такой участок отсутствует).
а) если запаздывание невелико (по сравнению с инерционностью объекта), то аппроксимация моделью 2-го порядка без запаздывания пригодна (гладкая начальная часть процесса в модели имитирует запаздывание в объекте) | б) если запаздывание в объекте существенно, модель 2-го порядка без запаздывания теряет точность |
Рис. 1.12. Иллюстрация к условиям применимости модели 2-го порядка без запаздывания с действительными характеристическими числами
3.2.4. Модель в форме дифференциального уравнения 2-го порядка с запаздыванием и с действительными характеристическими числами (последовательное соединение апериодического звена 2-го порядка и звена запаздывания). Дифференциальное уравнение имеет форму, аналогичную (1.5), но в него введено запаздывание t аналогично (1.3):
![]() . (1.8)
. (1.8)
Расчет приращения (по отношению к значению в «старой» статике) выхода объекта по (1.8) как реакции на входное воздействие, изменяющееся скачком при t = 0 (![]() ) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
 , (1.9)
, (1.9)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики.
Область применимости модели (1.8) шире, чем модели (1.5), т. к. участок переходного процесса, соответствующий запаздыванию, гладко (т. е. без разрыва производной по времени ![]() ) сопрягается с участком x(t), t > τ. Благодаря этому удается представить моделью (1.8) динамические процессы с большими запаздываниями (рис. 1.13).
) сопрягается с участком x(t), t > τ. Благодаря этому удается представить моделью (1.8) динамические процессы с большими запаздываниями (рис. 1.13).
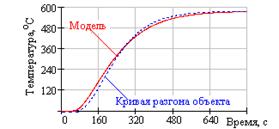
Рис. 1.13. Иллюстрация высокого качества представления динамики объекта с большим
запаздыванием моделью 2-го порядка с запаздыванием
3.2.5. Мы видим (рис. 1.13), что даже модель 2-го порядка с запаздыванием не всегда позволяет достичь совпадения в начальной части переходного процесса: модель сначала опережает процесс в объекте, а затем отстает от процесса. Если по результатам экспериментальных исследований получилось заметное расхождение, можно попытаться усложнить модель – в частности, путем использования модели в форме дифференциального уравнения 3-го порядка (без запаздывания, как (1.1), или с запаздыванием, получаемым из (1.1) аналогично (1.8)) с действительными характеристическими числами:

![]() (1.10)
(1.10)
Расчет приращения (по отношению к значению в «старой» статике) выхода объекта по этой модели как реакции на входное воздействие, изменяющееся скачком при t = 0 (![]() ) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
 (1.11)
(1.11)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики.
3.3. Общие рекомендации о применении математических моделей
3.3.1. О целесообразности использования как можно более простых моделей. Сравним модели (1.1), (1.3), (1.5), (1.8) и (1.10). Мы видим, что по мере возрастания сложности модели возрастает и число параметров, которые нужно определить по экспериментальным данным. Поэтому чем сложнее модель, выбранная нами, тем более продолжительным должен быть эксперимент на объекте. На практике продолжительные эксперименты нежелательны по двум причинам:
1. Позиция Заказчика работы: всякий эксперимент связан с нарушениями номинальных условий работы объекта; продолжительные нарушения вызывают технологические нарушения и экономические потери, рассматриваемые производственниками как крайне нежелательные.
2. Позиция разработчика системы управления: при длительном эксперименте могут сказаться изменения параметров объекта (явление дрейфа, см. рис. 1.5); в результате эксперимент потеряет воспроизводимость.
Поэтому из всех моделей, обеспечивающих достаточную точность воспроизведения динамики объекта, следует выбирать простейшую.
3.3.2. Поскольку результаты эксперимента практически всегда искажаются помехами (рис. 1.5), «маскирующими» свойства объекта, необходимым этапом составления математической модели объекта является устранение помех (соответствующие методы рассматриваются на практическом занятии № 2).
4. Контрольные вопросы
Перечислите основные этапы, выполнение которых необходимо для создания эффективной САУ. Какова технологическая цель функционирования объекта, рассматриваемого на практическом занятии в качестве примера? Что является возмущающим воздействием в примере, рассматриваемом на практическом занятии? Что является управляющим воздействием? Что является выходом объекта? Что такое запаздывание? Что такое период инерционности? Что такое статический (установившийся) режим? Что такое кривая разгона, зачем она используется, как ее получить? Для чего нужно сглаживать экспериментальные кривые? Приведите примеры математических моделей процесса нагрева. Что показывает коэффициент усиления модели объекта?ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 2
ТЕМА: «СГЛАЖИВАНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ
ЗАВИСИМОСТЕЙ. ОЦЕНКА ПАРАМЕТРОВ МОДЕЛИ ОБЪЕКТА»
Время проведения практического занятия (аудиторные часы) – 2 часа.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: ознакомиться с назначением и методами обработки экспериментальных данных и с методикой определения параметров модели объекта по кривым разгона.
Рассматриваемые вопросы:
1. Цель обработки экспериментальных данных (на примере кривых разгона).
2. Метод скользящего среднего.
3. Метод четвертых разностей.
4. Сравнение методов и определение областей их применения.
5. Методика оценки параметров модели первого порядка с запаздыванием.
В качестве примера используются результаты экспериментального исследования нагревательного объекта (см. описание практического занятия № 1).
1. Цель обработки экспериментальных данных
Рассмотрим типичный пример экспериментальной кривой разгона (рис. 1.5). Если попытаться подобрать модель, выход которой будет воспроизводить экспериментальную кривую разгона, то такая модель отразит не только свойства объекта, но и свойства измерительных помех: внутренние характеристики объекта окажутся «замаскированными» внешними помехами.
Поэтому экспериментальную зависимость подвергают предварительной обработке с целью сгладить ее и выявить зависимость, порожденную свойствами самого объекта.
Примечание: глагол «сгладить» имеет тот же корень, что и «глаз»: в зрение встроен весьма совершенный механизм сглаживания, с помощью которого мы без труда видим зависимость, «замаскированную» помехами; в этом легко убедиться, если прорисовать зависимость, подлежащую выявлению, по рис. 1.5.
Итак, цель обработки экспериментальных данных (в частности, экспериментальных кривых разгона) состоит в выявлении зависимостей, порожденных свойствами объекта (эти зависимости в экспериментальных данных «замаскированы» помехами).
Понятно, что механизм подавления помех базируется на усреднении (негласно предполагается, что помехи имеют нулевое среднее значение). Действие усреднения и благотворное (подавляет помехи), и вредное (может нежелательно подвергнуться усреднению искомая зависимость). Поэтому методы обработки экспериментальных зависимостей с помехами всегда предполагают наличие компромисса: подавить помехи, но не слишком сильно, чтобы не сгладить искомую зависимость. Ниже рассмотрим два метода.
2. Метод скользящего среднего
Назначение метода скользящего среднего для обработки кривых разгона, снимаемых на объекте для последующего получения математической модели, – облегчить подбор уравнений, описывающих процесс в объекте, и расчет оценки коэффициентов этих уравнений (параметров модели). Для того чтобы произвести такие действия, целесообразно обработать экспериментальную кривую разгона (рис. 1.5) так, чтобы получить более гладкую кривую (рис. 1.4). Подбор уравнений и расчет параметров для гладких кривых сделать гораздо легче, чем при использовании результатов эксперимента, загрязненных помехами. Причина состоит в том, что для получения математической модели объекта часто необходима операция дифференцирования, которая при наличии высокочастотных помех выполняется с большими погрешностями: по существу действие даже небольшой высокочастотной помехи делает кривую многоэкстремальной, и в каждой точке экстремума производная будет изменять знак; а поскольку помеха высокочастотная – абсолютные значения производной будут изменяться в широких пределах, что совершенно не соответствует свойствам производных искомой гладкой функции.
2.1. Необходимые теоретические сведения
2.1.1. Содержательная постановка задачи. Представим себе, что в результате эксперимента получены точки кривой разгона, загрязненные измерительными помехами (рис. 2.1а). Кривая разгона является реакцией объекта (изменение температуры), вызванной ступенчатым изменением управляющего воздействия (сопротивления в обмотке возбуждения электропривода питателя печи, см. практическое занятие № 1, рис. 1.3). График изменения управляющего воздействия показан в верхней части рисунка.
Измерительные помехи маскируют «природную», свойственную объекту зависимость, которую глаз исследователя легко прорисует на фоне помех (рис. 2.1б).
Поставим задачу создания алгоритма, который также может выявить эту зависимость.
а) экспериментальная кривая разгона | б) зависимость, которую нужно выявить |
Рис. 2.1. К постановке задачи сглаживания экспериментальных зависимостей
2.1.2. Основная идея алгоритма. Алгоритм скользящего среднего является прозрачным обобщением известного из курса физики правила трех измерений (нужно сделать три измерения и в качестве результата взять среднее значение результатов измерений).
Фазы алгоритма метода показаны на рис. 2.2. Пусть выбрано нечетное количество экспериментальных точек (чтобы явно можно было выделить центральную точку). В примере, рассматриваемом на рис. 2.2, выбрано число точек, равное 5.
§ Фаза 1, рис. 2.2а: выбираем первые (по времени) 5 точек, охватываем их «окном усреднения».
§ Фаза 2, рис. 2.2б: находим среднее значение точек, попавших в «окно». Показываем это значение (его абсцисса равна абсциссе срединной точки «окна», в рассматриваемом примере – третьей). Точка, соответствующая усредненному значению, показана крестиком.
§ Фаза 3, рис. 2.2в: сдвигаем «окно усреднения» на одну точку. При этом первая точка зависимости из окна уйдет, а вместо нее в окно попадет следующая точка зависимости. Снова рассчитаем среднее значение и покажем его на графике.
§ Дальнейшие фазы аналогичны: сдвигаем «окно усреднения», рассчитываем среднее значение по точкам в «окне», показываем это значение на графике.
Мы видим, что в результате таких действий прорисовывается гораздо более гладкая зависимость (рис. 2.2е).
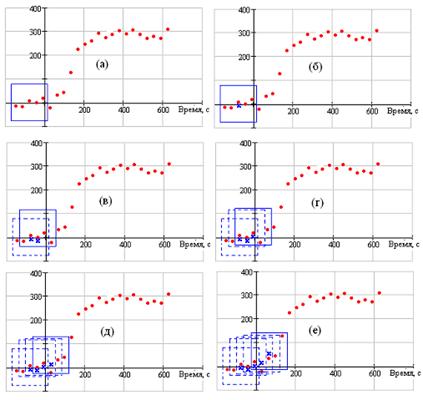
Рис. 2.2. Фазы алгоритма скользящего среднего
2.1.3. Формальные соотношения являются обобщением идеи п. 2.1.2 на произвольное нечетное число точек в «окне усреднения». Приведем их применительно к экспериментальной кривой разгона, показанной на рис. 1.5.
Обозначим ![]() (i = 1, …, n) – значение кривой разгона в момент времени ti.
(i = 1, …, n) – значение кривой разгона в момент времени ti.
Выберем четное число L интервалов времени (тогда число точек в этом интервале окажется нечетным).
Рассчитаем среднее значение hi по точкам, попавшим в «окно усреднения», и будем строить усредненную зависимость, заменяя экспериментальное значение ![]() усредненным значением hi:
усредненным значением hi:
![]() . (2.1)
. (2.1)
Например, если L = 4 (усреднение по 5-ти точкам), то
![]() .
.
Замечание: формула (2.1) неприменима на первых (i = 1, 2, …, L/2) и последних (i = n – L/2, …, n) точках. Поэтому экспериментальные точки нужно получить «с запасом». В частности, для кривых разгона следует получать «запасные» точки в режимах «старой» и «новой» статики.
2.1.4. Рекомендации по числу (L+1) точек в «окне усреднения». Нужно помнить, что в общем случае L выбирается под действием двух противоположных тенденций:
– если L слишком мало, то подавление помех будет недостаточным;
– если L слишком велико, то подавление помех будет отличным, но заодно подвергнется усреднению и искомая зависимость.
Поэтому компромисс находим подбором, пока глазу исследователя не покажется, что усреднение хорошее. Не следует бояться, что рекомендация ненаучная: исследователь всегда представляет себе физические основы работы объекта и поэтому примерно знает, какую форму имеет искомая зависимость.
Ориентировочные цифры:
– если число экспериментальных точек невелико (n < 30), то начинать расчеты нужно со значения L = 2 и постепенно увеличивать L (пока не выявится «замаскированная» зависимость);
– если число экспериментальных точек велико (n >100), то начинать расчеты можно с ближайшего снизу четного значения к величине n/2.
На рис. 2.3 показаны различные варианты выбора числа точек в «окне усреднения» – от явно недостаточного до явно избыточного.
Рис. 2.3. Влияние числа точек в «окне усреднения» на эффективность метода скользящего среднего
3. Метод четвертых разностей
Назначение метода – то же, что и метода скользящего среднего: облегчить подбор уравнений, описывающих процесс в объекте, и расчет оценки коэффициентов этих уравнений (параметров модели) за счет сглаживания помех, искажающих результаты эксперимента.
3.1. Необходимые теоретические сведения
3.1.1. Основная идея метода иллюстрируется рис. 2.4. Пусть имеются экспериментальные точки.
§ Фаза 1, рис. 2.4а: выберем 5 текущих точек, окружим их «окном усреднения».
§ Фаза 2, рис. 2.4б: используя координаты 5-ти точек, рассчитаем коэффициенты такой параболы, чтобы среднее квадратическое отклонение координат параболы от точек в окне было минимальным (применяется метод наименьших квадратов).
§ Фаза 3, рис. 2.4в: построим рассчитанную параболу и примем ее центральную точку в качестве координаты, сглаживающей значение центральной точки «окна усреднения».
§ Фаза 4 и последующие фазы, рис. 2.4г: сдвигаем окно на одну точку и повторяем те же действия: рассчитываем коэффициенты параболы, строим ее и принимаем ее центральную точку в качестве координаты, сглаживающей значение центральной точки окна усреднения.
В результате получится эффект сглаживания экспериментальных точек (сглаженные точки на рис. 2.4 обведены).
Рис. 2.4. Фазы алгоритма четвертых разностей
Окончание рис. 2.4. Фазы алгоритма четвертых разностей
3.1.2. Формальные соотношения. (Получение соотношений для метода четвертых разностей предоставляется студентам для самостоятельного изучения).
Обозначим ![]() (i = 1, …, n) – значение кривой разгона в момент времени ti.
(i = 1, …, n) – значение кривой разгона в момент времени ti.
Для i = 2, 3, …, n – 2 координаты точек усредненной зависимости рассчитываются по формуле:
![]() . (2.2)
. (2.2)
Для начальных и концевых точек (i = 0, 1, n-1, n) формулы имеют вид:
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
![]() (2.5)
(2.5)
![]() . (2.6)
. (2.6)
3.1.3. Настраиваемый параметр метода четвертых разностей – число проходов алгоритма: если после первого прохода построенная зависимость окажется недостаточно гладкой, нужно повторить процедуру, используя результат предыдущего сглаживания в качестве исходных данных.
4. Сравнение методов скользящего среднего и четвертых разностей
Расчеты показывают, что при большом числе точек и высокочастотных измерительных помехах метод скользящего среднего предпочтительнее метода четвертых разностей.
При малом числе экспериментальных точек и при наличии низкочастотных помех, наоборот, метод четвертых разностей предпочтительнее метода скользящего среднего.
5. Оценка параметров модели объекта по сглаженной кривой разгона
5.1. Основная идея оценки параметров модели методом площадей состоит в таком подборе параметров, чтобы площадь под «перевернутой» экспериментальной кривой разгона была такой же, как площадь под «перевернутой» расчетной кривой, полученной на модели. Поясним идею примером оценки постоянной времени модели в форме апериодического звена первого порядка:
![]() , (2.7)
, (2.7)
где T0 – постоянная времени модели;
k0 – коэффициент усиления модели (подробнее см. описание практического занятия № 1).
Решение дифференциального уравнения (2.7) для случая, когда на вход объекта подается ступенчатое воздействие, имеет вид:
![]() , (2.8)
, (2.8)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики, соответствующей входу u1, скачком изменившемуся до значения u2 при t = 0.
Поясним основную идею на примере определения параметров этой простейшей модели (рис. 2.5).
1. Пусть в результате опытов на реальном объекте получена экспериментальная кривая разгона. Сгладим ее (одним из методов, рассмотренных ранее) и в предположении о том, что коэффициент усиления объекта известен (способ определения описан ниже), приведем ее к диапазону 0...1 (рис. 2.5а).
2. Площадь под кривой (рис. 2.5а) определить нельзя, т. к. кривая не образует ограниченную область. Поэтому «перевернем» ее, вычитая ее значения из единицы. Получим кривую рис. 2.5б.
3. Рассчитаем площадь SЭ под ней (например, методом прямоугольников, см. ниже).
Рис. 2.5. Пояснение к методу площадей
4. Определим расчетную кривую разгона, приведенную к единичному диапазону, по модели (2.8) в форме:
![]() . (2.9)
. (2.9)
5. Мы видим, что значения кривой (2.9) зависят от постоянной времени T0.
6. Если расчетную кривую (рис. 2.5в) перевернуть (рис. 2.5г), то можно подобрать T0 так, чтобы площади под кривыми (рис. 2.5б и рис. 2.5г) были одинаковыми. Тогда можно надеяться, что расчетная и экспериментальная кривые будут сходными.
7. Площадь SM под кривой (2.9) находится аналитически:
![]() (2.10)
(2.10)
8. Таким образом, постоянную времени модели (2.7) можно оценить по площади SЭ под нормированной (т. е. приведенной к единичному диапазону) «перевернутой» сглаженной экспериментальной кривой разгона.
9. Для расчета SЭ можно использовать метод прямоугольников (рис. 2.6): интервал времени tпр, на котором «перевернутая» экспериментальная кривая заметно отличается от 0, разбивается на q равных отрезков продолжительностью Dt, и затем строятся прямоугольники с основаниями Dt и высотами, соответствующими значениям экспериментальной кривой на левой границе прямоугольников. Площади прямоугольников суммируются.
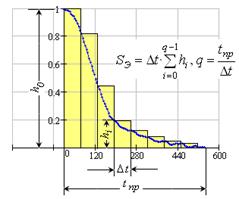
Рис. 2.6. Вычисление площади под «перевернутой» экспериментальной кривой разгона
10. После расчета получаем значение параметра модели:
![]() (2.11)
(2.11)
11. Осталось пояснить, как найти коэффициент усиления объекта. Для этого используем формулу:
![]() , (2.12)
, (2.12)
где xнов_стат, xстар_стат – соответственно значения выхода объекта в режимах «новой» и «старой» статики;
u2, u1 – значения входного воздействия, изменяющегося скачком от значения u1, соответствующего «старой» статике, до значения u2, соответствующего «новой» статике.
Замечания:
1. Основным преимуществом метода площадей является его малая чувствительность к неточностям экспериментальной кривой разгона: при интегрировании эти неточности сглаживаются.
2. Для использования более сложных моделей (второго порядка и выше) метод остается применимым, но необходимо повторное интегрирование «перевернутой» кривой разгона.
3. Оценку запаздывания лучше всего проводить «на глаз»: сдвинуть экспериментальную кривую разгона так, чтобы устранить влияние запаздывания на ее график, а затем включить запаздывание в окончательную форму модели.
Если проделать расчеты параметров модели 1-го порядка по кривой разгона, полученной на виртуальном объекте, который был рассмотрен на практическом занятии № 1, то мы увидим, что модель имеет невысокую точность (рис. 2.7). Мы видим признаки недостаточности порядка модели (2.7): начальная часть расчетной кривой имеет более высокую скорость нарастания, а концевая – более низкую, чем у экспериментальной кривой (хотя и видно, что площади под перевернутыми кривыми примерно равны). Целесообразно попытаться использовать модель более высокого порядка и учесть запаздывание.
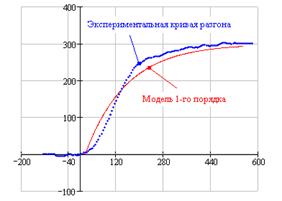
Рис. 2.7. Сравнение экспериментальной кривой разгона с расчетной, полученной при
использовании модели 1-го порядка
6. Контрольные вопросы
Зачем сглаживать кривые разгона, полученные экспериментально? Какие методы сглаживания экспериментальных зависимостей Вы знаете? Какова основная идея алгоритма скользящего среднего? Почему число интервалов времени в алгоритме скользящего среднего должно быть четным? Каковы рекомендации по выбору числа точек в «окне усреднения» при использовании алгоритма скользящего среднего? Какова основная идея метода четвертых разностей? Что является настраиваемым параметром метода четвертых разностей? В каком случае метод скользящего среднего предпочтительнее метода четвертых разностей? В каком случае метод четвертых разностей предпочтительнее метода скользящего среднего? Какие этапы нужно выполнить для идентификации динамической характеристики методом площадей? Что такое нормированная кривая разгона?ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 3
ТЕМА: «ПОСТРОЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ. ПОНЯТИЕ ОБ УПРАВЛЕНИИ С ОБРАТНОЙ СВЯЗЬЮ»
Время проведения практического занятия (аудиторные часы) – 2 часа.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цели занятия: ознакомиться с методом построения передаточной функции САУ по ее дифференциальному уравнению и с выполнением обратной операции (построение дифференциального уравнения по передаточной функции); получить представление о назначении и существе САУ с отрицательной обратной связью.
Рассматриваемые вопросы:
1. Закрепление понятия «передаточная функция САУ».
2. Пример построения передаточной функции по дифференциальному уравнению САУ.
3. Пример построения дифференциального уравнения по передаточной функции САУ.
4. Качественные особенности замкнутой САУ с обратной связью. Существо управления с обратной связью.
1. Определение передаточной функции САУ
Понятие «передаточная функция» введено в связи с использованием аппарата преобразования Лапласа, благодаря которому в пространстве изображений по Лапласу удается понизить сложность описания процессов в САУ (перейти от дифференциальных уравнений к алгебраическим).
Покажем два способа представления САУ: в исходном пространстве (аргумент – время, язык описания – дифференциальные уравнения) и в пространстве изображений (аргумент – оператор Лапласа, язык описания – алгебраические уравнения (рис. 3.1)).
Рис. 3.1. Иллюстрация понятия «передаточная функция САУ»
Определение: передаточной функцией САУ W(p) называется отношение изображения (по Лапласу) выхода системы Y(p) к изображению входа U(p).
![]() . (3.1)
. (3.1)
Область применения понятия – тройка ограничений:
1. САУ обязательно являются линейными.
2. Параметры САУ не зависят от времени.
3. Начальные условия являются нулевыми.
2. Пример построения передаточной функции САУ по ее дифференциальному уравнению
Пусть модель САУ задана в терминах «вход–выход», все переменные – скаляры; пусть модель имеет форму дифференциального уравнения 3-го порядка:
 . (3.2)
. (3.2)
Пусть начальные условия – нулевые:
![]() .
.
Тогда изображение по Лапласу для производных в (3.2) примет вид умножения на оператор Лапласа в степени, соответствующей порядку производной:
Подставляя изображения в (3.2), получим:
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
