


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Помня, что после преобразования Лапласа получено алгебраическое уравнение, вынесем за скобки Y(p) и U(p):
 (3.3)
(3.3)
С помощью (3.3) найдем передаточную функцию:
![]() . (3.4)
. (3.4)
Мы видим, что в простейших случаях передаточная функция представляет собой дробь, числитель и знаменатель которой – полиномы оператора Лапласа, степень числителя в подавляющем числе случаев не выше (обычно – ниже) степени знаменателя.
Примечание: в более сложных случаях передаточная функция содержит иррациональные и трансцендентные функции (в частности, если объект управления содержит запаздывание и / или распределенные параметры, т. е. описывается дифференциальными уравнениями с частными производными).
3. Пример построения дифференциального уравнения САУ по ее передаточной функции
Технология построения:
1. Используя передаточную функцию, записать: [Знаменатель передаточной функции]×Y(p) = [Числитель передаточной функции]×U(p).
2. Раскрыть скобки.
3. Перейти от изображений производных к оригиналам: вместо pk·Y(p), pm·U(p) записывать  , получим дифференциальное уравнение САУ в терминах «вход–выход».
, получим дифференциальное уравнение САУ в терминах «вход–выход».
Пример: пусть структура САУ содержит объект (модель 2-го порядка без запаздывания) и регулятор в цепи обратной связи (рис. 3.2). Заданы передаточные функции объекта и регулятора. Мы видим, что в состав структуры САУ входят:
1) апериодическое звено 2-го порядка (передаточная функция объекта);
2) безынерционное звено и соединённое с ним параллельно интегрирующее звено (передаточная функция регулятора).
Считаем, что параметры объекта ko, T1, T2 (соответственно – коэффициент усиления и постоянные времени) и параметры регулятора kp, ki (как мы узнаем на практическом занятии № 5 – коэффициенты при пропорциональной и интегральной части закона управления) известны.
Поставим задачу: сформировать дифференциальное уравнение САУ по заданным передаточным функциям ее элементов и по схеме их соединения. В данном случае вид соединения – звено, охваченное отрицательной обратной связью.
Шаг 1. Используя теорему алгебры структурных преобразований для звена, охваченного отрицательной обратной связью, записываем передаточную функцию САУ по каналу «задающее воздействие g(t) (задано изображением по Лапласу G(p)) – выход y(t) (задан изображением по Лапласу Y(p))». Прямая цепь представлена последовательным соединением регулятора и объекта, цепь обратной связи – безынерционным звеном с коэффициентом усиления единица. Для того чтобы это было легче понять, полезно перерисовать схему рис. 3.2 так, как на рис. 3.3.
Рис. 3.2. Структурная схема САУ, изображенная с помощью передаточных функций
ее элементов
|
Рис. 3.3. Структурная схема САУ с показом прямой цепи и цепи отрицательной обратной связи
 .
.
После упрощений получаем:
![]() . (3.5)
. (3.5)
Шаг 2. Записываем связь изображения входа с изображением выхода согласно (3.1):


![]() (3.6)
(3.6)
Шаг 3. Используем обратное преобразование Лапласа для получения дифференциального уравнения САУ. Вместо pk·Y(p), pm·G(p) запишем  :
:
 (3.7)
(3.7)
4. Качественные особенности замкнутой САУ с обратной связью. Существо управления с обратной связью
Роль, которую система управления играет в общем процессе функционирования объекта, относится к одному из двух классов:
1. Подавление возмущений (как внешних, так и параметрических).
2. Ускорение динамических процессов.
Рассмотрим сначала класс 1 (подавление возмущений).
Пусть имеется объект, технологической целью которого является обеспечение заданного (и длительно постоянного во времени) значения выхода (например, температуры нагрева). Если бы возмущающие воздействия отсутствовали, то обратная связь была бы не нужна: можно было бы подобрать такое значение входного сигнала, при котором выход соответствовал бы заданию (рис. 3.4).
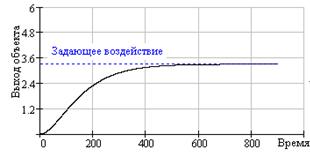
Рис. 3.4. Если возмущений нет, то достигается соответствие выхода заданию
без САУ с обратной связью
Управление объектом без специальной системы экономически целесообразно, и если разработчик уверен, что, во-первых, на объект не будут действовать заметные возмущения и, во-вторых, технологический режим работы объекта будет таким, что интервал продолжительности постоянства задающего воздействия значительно длиннее интервала переходного процесса в объекте, то именно такой вариант управления и следует применить. В качестве примера можно указать кухонную духовку. Внешние возмущения (температура на кухне) пренебрежимо малы по сравнению с температурой внутри нагретой духовки, поэтому часто средства измерения температуры в духовку не встраивают, ограничиваются градуированным задатчиком интенсивности пламени (самый дешевый вариант).
Но посмотрите, как изменится результат работы объекта, если в момент времени tВ на вход объекта поступит внешнее постоянное (рис. 3.5а) или переменное во времени (рис. 3.5б) возмущающее воздействие. Поскольку возмущения и задающие воздействия поступают на вход объекта суммарно (и равноправно), то выход объекта отклонится от задания, и его функционирование не будет соответствовать технологической цели.
Запомним: при наличии сильных внешних неизмеряемых возмущений САУ с обратной связью необходима для того, чтобы могла быть достигнута технологическая цель функционирования объекта.
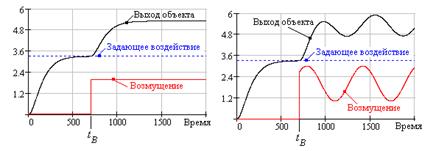
а) реакция объекта (САУ отсутствует) на ступенчатое возмущающее воздействие | б) реакция объекта (САУ отсутствует) на возмущающее воздействие, переменное во времени |
Рис. 3.5. При наличии сильных внешних неизмеряемых возмущений управление без САУ с обратной связью неэффективно
Еще большую опасность для работы объекта представляют внутренние возмущения (обычно имеют форму медленного изменения во времени по разным причинам – например, вследствие износа оборудования, изменения свойств катализатора и т. п.). На рис. 3.6а показан результат действия медленного во времени линейного «сползания» коэффициента усиления объекта ko. Мы видим, что выход объекта не соответствует заданию. Если же линейное «сползание» коэффициента усиления сопровождается медленными периодическими изменениями (рис. 3.6б), то появляется катастрофическое явление – неустойчивость.
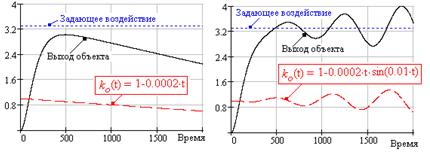
а) реакция объекта (САУ отсутствует) на линейный во времени дрейф коэффициента усиления объекта | б) реакция объекта (САУ отсутствует) на дрейф коэффициента усиления в виде суммы линейной и периодической составляющих |
Рис. 3.6. При наличии даже небольших внутренних (параметрических) возмущений
управление объектом без САУ с обратной связью не только неэффективно, но может
привести к неустойчивости
Запомним: при наличии даже слабых внутренних (параметрических) возмущений САУ с обратной связью необходима для того, чтобы могла быть достигнута технологическая цель функционирования объекта.
Для доказательства необходимости САУ с отрицательной обратной связью приведем графики работы такой САУ с регулятором, передаточная функция которого показана на рис. 3.2. На графиках (рис. 3.7) иллюстрируется работа САУ с регулятором в сравнении с работой объекта без системы управления при наличии внешних возмущений. Мы видим, что САУ подавляет внешние возмущения, обеспечивая достижение технологической цели работы объекта. Показан (как и на рис. 3.5) случай, когда в момент времени tВ на вход объекта поступает внешнее постоянное (рис. 3.7а) или переменное во времени (рис. 3.7б) возмущающее воздействие.
САУ с обратной связью способна также подавлять и внутренние (параметрические) возмущения, если они не слишком велики (в противном случае возникает опасность неустойчивости; но и для этого случая теория управления имеет средства: САУ нужно проектировать как адаптивную, у такой САУ будет свойство перестраивать структуру и / или настроечные параметры регулятора при изменениях параметров объекта). На рис. 3.8 иллюстрируется подавление линейного (рис. 3.8а) и линейного с периодической составляющей (рис. 3.8б) тренда коэффициента усиления объекта. Мы видим, что качество выполнения технологической цели управления при наличии САУ достигается.
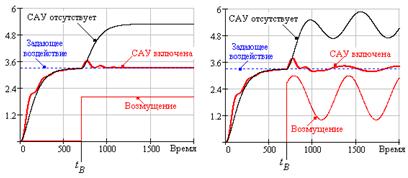
а) подавление внешнего ступенчатого возмущающего воздействия | б) подавление внешнего периодического возмущающего воздействия |
Рис. 3.7. САУ с обратной связью подавляет внешние возмущения (для сравнения показан выход объекта при отсутствии САУ)
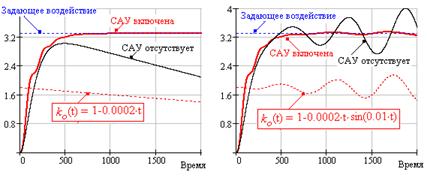
а) подавление внутреннего возмущения (линейного дрейфа коэффициента усиления объекта) | б) подавление внутреннего возмущения (дрейфа коэффициента усиления объекта с линейной и периодической составляющими) |
Рис. 3.8. САУ с обратной связью подавляет внутренние (параметрические) возмущения
(для сравнения показан выход объекта при отсутствии САУ)
Перейдем к рассмотрению класса 2 задач, в которых необходимо наличие системы управления (ускорение динамических процессов). На первый взгляд такая постановка задачи вызывает вопрос: каким же образом получается, что регулятору («энергетическому ничтожеству» по сравнению с мощностью объекта) удается осуществлять функцию управления? Нужно обратить внимание на то, что при прорисовке схемы системы управления энергетические аспекты совсем не отражаются (конечно, и регулятор, и иные устройства управления потребляют некоторое количество энергии, но оно пренебрежимо мало по сравнению с энергетическими потоками, которыми оперирует объект).
Ответ состоит в том, что САУ работает за счет «обмана» объекта. Пояснения – на рис. 3.9. Если в отсутствие САУ с обратной связью подать на вход объекта нужное значение задающего воздействия, то при отсутствии возмущений выход практически придет к заданию за время tnatur (рис. 3.9а). САУ «обманывает» объект, подавая на его вход расчетное, искусственное задающее воздействие, превышающее нужное. Поэтому (рис. 3.9б) нужное значение будет достигнуто за гораздо меньшее время tforc << tnatur (рис. 3.9б). Конечно, нужно всё время изменять это «искусственное» задание так, чтобы привести выход объекта к окрестности заданного значения; этим и занимается система автоматического управления.
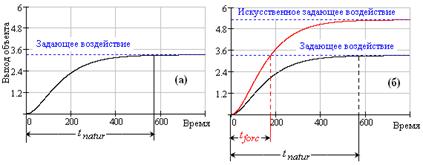
Рис. 3.9. Система автоматического управления подает на вход «искусственное» задающее воздействие, заставляя объект быстрее достичь нужного значения задающего воздействия
Поясним термин «окрестность заданного значения». На практике нельзя требовать точного соответствия выхода объекта заданию (из-за неизбежных помех и неточностей это невозможно). Оговаривается (в техническом задании на создание САУ) максимально возможное отклонение от задания. Тогда задающее воздействие превращается в «трубку статики» (рис. 3.10): переходный процесс от «старой» к «новой» статике считается завершенным после момента времени t*, начиная с которого колебания выхода объекта всегда остаются внутри «трубки статики». Показатель t* называется временем переходного процесса. Нужно пояснить, что он субъективно зависит от того, какой размер трубки статики считается приемлемым.
Сравним время переходного процесса в САУ с обратной связью с условиями работы объекта без САУ. Мы видим (рис. 3.10а), что время переходного процесса tcontrol при наличии САУ существенно (почти в 2 раза) меньше времени переходного процесса tfree для объекта без САУ. Еще убедительнее выявляются преимущества САУ для ускорения процессов в объекте при отработке переменного во времени задающего воздействия (рис. 3.10б): объект без САУ безнадежно отстает от изменения задания, а при наличии САУ качество воспроизведения задания остается хорошим.
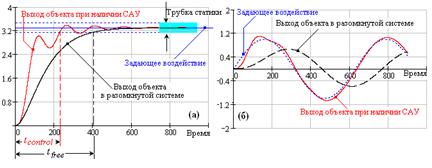
Рис. 3.10. Система автоматического управления ускоряет реакцию объекта на изменения
задающего воздействия
Запомним: при работе объекта в условиях частых изменений задающих воздействий САУ с обратной связью необходима для ускорения реакции объекта на эти изменения и для того, чтобы объект мог выполнить технологическую цель своего функционирования. |
5. Контрольные вопросы
Что такое передаточная функция? Для чего используются передаточные функции? Каковы ограничения, накладываемые на область применения понятия передаточная функция? Какова технология построения дифференциального уравнения САУ по ее передаточной функции? Что такое алгебра структурных преобразований, зачем ее вводят? Как рассчитать передаточную функцию последовательно соединенных звеньев (если передаточная функция каждого известна)? Как рассчитать передаточную функцию параллельно соединенных звеньев (если передаточная функция каждого известна)? Как рассчитать передаточную функцию САУ, охваченной обратной связью? Чем отличается передаточная функция САУ, охваченной отрицательной обратной связью, от передаточной функции САУ, охваченной положительной обратной связью? Какова роль, которую система управления играет в общем процессе функционирования объекта?ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 4
ТЕМА: «СТРУКТУРНЫЕ ПРЕОБРАЗОВАНИЯ САУ
С ПЕРЕКРЕСТНЫМИ СВЯЗЯМИ»
Время проведения практического занятия (аудиторные часы) – 2 часа.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: изучить метод определения общей передаточной функции САУ с перекрестными связями (на примере).
Рассматриваемые вопросы:
1. Технология структурных преобразований САУ с перекрестными связями.
2. Понятие о принципе суперпозиции и его применении для нахождения передаточных функций системы со многими входными воздействиями.
3. Подробное рассмотрение примера построения общей передаточной функции САУ по каналам:
a) «задающее воздействие – выход объекта»;
b) «задающее воздействие – рассогласование между заданием и выходом объекта»;
c) «возмущающее воздействие – выход объекта»;
d) «возмущающее воздействие – рассогласование между заданием и выходом объекта».
1. Технология структурных преобразований САУ
с перекрестными связями
Определение 1. Многоконтурной системой без перекрестных связей (другое название – простая многоконтурная САУ) называется такая, в которой внешние параллельные звенья и / или внешние звенья обратных связей охватывают И начало, И конец другого участка внутренних цепей с параллельными звеньями и / или внутренних цепей обратных связей.
Технология расчета общей передаточной функции состоит в использовании теорем алгебры структурных преобразований (последовательное соединение звеньев, параллельное соединение звеньев, передаточная функция звена с обратной связью) от внутренних контуров – к внешним.
Определение 2. Многоконтурной системой с перекрестными связями (другое название – многосвязная САУ) называется такая, в которой внешние параллельные звенья и / или внешние звенья обратных связей охватывают ТОЛЬКО начало, но НЕ конец или ТОЛЬКО конец, но НЕ начало другого участка внутренних цепей с параллельными звеньями и / или внутренних цепей обратных связей.
Технология расчета общей передаточной функции:
1. Перестановкой узлов и сумматоров добиться исключения перекрестных связей и получить простую многоконтурную САУ.
2. Определить общую передаточную функцию полученной простой многоконтурной САУ.
2. Пример получения общей передаточной функции многоконтурной САУ с перекрестными связями
2.1. Постановка задачи
Дано: структурная схема (рис. 4.1) и передаточные функции входящих в нее элементарных звеньев. На схеме показаны изображения задающего воздействия G(p), выхода системы Y(p) и возмущающего воздействия F(p). Оператор p в обозначениях передаточных функций звеньев опущен.
Обозначения:
![]()
Рис. 4.1. Структурная схема многоконтурной САУ с перекрестными связями
Получить: общие передаточные функции САУ по каналам:
Канал 1: «задающее воздействие g(t) – выход объекта y(t)».
Канал 2: «задающее воздействие g(t) – рассогласование между задающим воздействием и выходом объекта e(t) = g(t) – y(t)».
Канал 3: «возмущающее воздействие f(t) – выход объекта y(t)».
Канал 4: «возмущающее воздействие f(t) – рассогласование между задающим воздействием и выходом объекта e(t) = g(t) – y(t)».
2.2. Преобразование многоконтурной САУ с перекрестными связями в структуру простой многоконтурной САУ
Шаг 1. Замена последовательно соединенных звеньев W1 и W2 единым звеном W12. Согласно теореме 1 алгебры структурных преобразований,
![]() . (4.1)
. (4.1)
Шаг 2. Перенос узла 3 против хода сигнала через объединенное звено W12. Согласно теореме 4б алгебры структурных преобразований, при этом должно быть вставлено такое же звено в цепь перенесенного сумматора. Получим промежуточную структурную схему (рис. 4.2).
Рис. 4.2. Результат переноса узла 3 против хода сигнала
Шаг 3. Перенос сумматора 3 по ходу сигнала за сумматор 4 через звенья W3 и W4. Согласно теореме 4а алгебры структурных преобразований, вставляется звено W3∙W4. Получим промежуточную структурную схему (рис. 4.3). Звенья W12 и W3 оказываются соединенными последовательно, заменяем их одним звеном (согласно теореме 1 – произведением их передаточных функций).
Рис. 4.3. Результат переноса сумматора 3 по ходу сигнала
Последующие шаги (рис. 4.4).
1. Переносим сумматор 1 по ходу сигнала через звено W4.
2. В цепь 1 – 4 добавляем звено W4.
3. Переносим сумматор 2 по ходу сигнала, переставляем с сумматором 1 и с сумматором 4 без вставки звеньев.
В результате получаем многоконтурную структуру без перекрестных связей (рис. 4.4).
Мы видим, что многоконтурная САУ с перекрестными связями в результате приобрела структуру простой многоконтурной САУ. Этап 1 завершен.
Рис. 4.4. Окончание преобразования структуры с перекрестными связями в структуру
простой многоконтурной САУ
2.3. Получение общей передаточной функции по передаточным функциям звеньев структуры простой многоконтурной системы
Производится (последовательно, начиная с самого внутреннего контура) вычисление общих передаточных функций параллельных соединений и структур с обратными связями.
Шаг 1. Замена контура с передаточными функциями W1, W2, W5 единым звеном.
![]() . (4.2)
. (4.2)
Затем, пользуясь перестановочностью сумматоров, переносим сумматор 3 вместе со всеми входящими в него звеньями в позицию вне контуров параллельных звеньев. Получим структуру, показанную на рис. 4.5.
Рис. 4.5. Шаг 1 преобразования структуры простой многоконтурной САУ
Шаг 2. Замена контура с передаточными функциями W125 и W1234 = = W1∙W2∙W3∙W4 единым звеном:
 . (4.3)
. (4.3)
Шаг 3. Объединение контура, полученного в результате шага 2, и параллельного контура с W4. Получим передаточную функцию прямой цепи, объединяющую все параллельные контуры (рис. 4.6). Для пояснения в цепь обратной связи включено звено с единичной передаточной функцией.
![]() (4.4)
(4.4)

Рис. 4.6. Структура САУ после выполнения шага 3
2.4. Принцип суперпозиции
Дальнейшие шаги зависят от того, для какого канала САУ нам нужно составить передаточные функции. Согласно заданию нужно рассмотреть 4 канала:
Канал 1: «задающее воздействие g(t) – выход объекта y(t)».
Канал 2: «задающее воздействие g(t) – рассогласование между задающим воздействием и выходом объекта e(t) = g(t) – y(t)».
Канал 3: «возмущающее воздействие f(t) – выход объекта y(t)».
Канал 4: «возмущающее воздействие f(t) – рассогласование между задающим воздействием и выходом объекта e(t) = g(t) – y(t)».
В зависимости от того, какой из каналов изучается, нужно отбросить «лишние» входы, используя принцип суперпозиции. Этот принцип справедлив ТОЛЬКО для линейных систем (но и аппарат преобразования Лапласа, и, следовательно, аппарат передаточных функций также применимы ТОЛЬКО для линейных систем).
Принцип суперпозиции: реакция системы на сумму внешних воздействий равна сумме реакций системы на каждое воздействие в отдельности. Принцип справедлив только для линейных систем.
В общей формулировке, применимой не только для систем автоматического управления: следствие суммы причин равно сумме следствий от каждой причины в отдельности.
2.5. Составление общей передаточной функции по каналу «задающее воздействие g(t) – выход объекта y(t)»
Согласно принципу суперпозиции исключим из рассмотрения «лишний» канал, связанный с возмущающим воздействием. Получим структуру, показанную на рис. 4.7.
Рис. 4.7. Структура САУ для канала «задающее воздействие – выход»
Используя теорему 3 алгебры структурных преобразований и формулу (4.4), получим передаточную функцию Wgy(p) по каналу «задающее воздействие g(t) – выход объекта y(t)» (с учетом того, что звено обратной связи имеет единичную передаточную функцию):
 . (4.5)
. (4.5)
2.6. Составление общей передаточной функции по каналу «задающее воздействие g(t) – рассогласование e(t)»
Полезно научиться приему, с помощью которого структура канала становится ясной (см. рис. 4.8): растягиваем линию от звена сравнения к рассогласованию (она теперь будет выходом изучаемого канала). Перерисовываем соединения между рассогласованием, прямой цепью и звеном сравнения, в результате чего увидим, что Wпрямой_цепи попадает в контур обратной связи этого канала. Для наглядности вставляем единичное звено между звеном сравнения и рассогласованием, получаем структуру рис. 4.8.
Рис. 4.8. Структура САУ для канала «задающее воздействие – рассогласование»
Используя теорему 3 алгебры структурных преобразований и формулу (4.4), получим передаточную функцию Wge(p) по каналу «задающее воздействие g(t) – рассогласование между задающим воздействием и выходом объекта e(t) = g(t) – y(t)» (с учетом того, что звено прямой цепи рис. 4.8 имеет единичную передаточную функцию, а звено отрицательной обратной связи – передаточную функцию Wпрямой_цепи):
 . (4.6)
. (4.6)
2.7. Составление общей передаточной функции по каналу «возмущающее воздействие f(t) – выход y(t)»
Используя принцип суперпозиции, исключим из рассмотрения задающее воздействие (положим g(t) = 0). Получим рис. 4.9 (вместо схемы рис. 4.6):
Рис. 4.9. Исходная структура САУ для вычисления передаточной функции по каналу «возмущение – выход»
Шаг 1. Используя теорему 8 алгебры структурных преобразований, переставляем сумматор с узлом. Получим рис. 4.10:
Рис. 4.10. Структура САУ для вычисления передаточной функции по каналу «возмущение – выход» после шага 1
Шаг 2. Учитывая, что звено сравнения изменяет знак суммирования, получим окончательно структуру, по которой найдем искомую передаточную функцию (рис. 4.11).
Рис. 4.11. Структура САУ для вычисления передаточной функции по каналу «возмущение – выход» после шага 2
Шаг 3. Вычисляем передаточную функцию, суммируя действие возмущения (попадающего на выход через 2 канала):
 (4.7)
(4.7)
2.8. Составление общей передаточной функции по каналу «возмущающее воздействие g(t) – рассогласование e(t)»
Снова «выворачиваем» схему так, чтобы выходом структуры оказалось рассогласование. Мы видим, что второй канал действия возмущений не оказывает влияния на рассогласование. Получим структуру, показанную на рис. 4.12.


Рис. 4.12. Структура САУ для вычисления передаточной функции по каналу «возмущение – рассогласование»
Передаточная функция по каналу «возмущающее воздействие g(t) – рассогласование e(t)» вычисляется по формуле:
 . (4.8)
. (4.8)
Решение примера завершено.
3. О пользе передаточных функций для исследования САУ
1. Общая передаточная функция САУ позволяет заключить, является ли САУ устойчивой. Как мы узнаем дальше, для этого нужно найти корни знаменателя передаточной функции или, по крайней мере, определить, является ли действительная часть каждого корня отрицательной (не обязательно знать конкретные числовые значения корней). САУ устойчива, если действительные части всех корней знаменателя общей передаточной функции отрицательны (это необходимое и достаточное условие устойчивости).
2. Для устойчивой САУ по общей передаточной функции можно определить, какое значение будет иметь выход передаточной функции при t ® ¥, если на вход поступает постоянное во времени входное воздействие. Для этого в формуле для передаточной функции нужно положить p = 0.
3. Для устойчивой САУ по общей передаточной функции можно определить, как будет отслеживаться переменное во времени непрерывно дифференцируемое входное воздействие «на бесконечности», т. е. спустя промежуток времени, в течение которого ощущается влияние начальных условий. Данная задача относится к области исследования качества управления.
4. Контрольные вопросы
Что такое многоконтурная система без перекрестных связей? Что такое многоконтурная система с перекрестными связями? Какова технология расчета общей передаточной функции САУ? Как на структурных схемах САУ обозначаются звено сравнения, сумматор, узел (развилка)? Как рассчитать передаточную функцию последовательно соединенных звеньев (если передаточная функция каждого звена известна)? Как рассчитать передаточную функцию параллельно соединенных звеньев (если передаточная функция каждого звена известна)? Как переносится сумматор по ходу и против хода сигнала при структурных преобразованиях САУ? Как переносится узел (развилка) по ходу и против хода сигнала при структурных преобразованиях САУ? Как переставляются узлы и сумматоры при структурных преобразованиях САУ? В чем заключается принцип суперпозиции, используемый при составлении общей передаточной функции по одному из каналов САУ? Сформулируйте необходимое и достаточное условие устойчивости САУ.ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 5

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
