


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
,
Методические материалы
к практическим занятиям по дисциплине «Основы теории управления»
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ГОУ ВПО «ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
,
Методические материалы
к практическим занятиям по дисциплине
«Основы теории управления»
Учебное пособие
Волгоград
2010
УДК 658.012.011.56(075.8)
К 84
Рецензенты: академик РАЕН, член-корр. международной академии наук РФ, д. ф.-м. н., профессор Саратовского государственного технического университета ; д. т. н., профессор Самарского государственного аэрокосмического университета им. академика ёва
Крушель, материалы к практическим занятиям по дисциплине «Основы теории управления»: учеб. пособие / , ; ВолгГТУ, Волгоград, 2010. – 136 с.
ISBN 0564-0
Предназначено для студентов и преподавателей технических вузов, осуществляющих подготовку бакалавров по направлению «Информатика и вычислительная техника» и по близким направлениям.
Область использования – практические занятия по дисциплине «Основы теории управления», подготавливающие студентов к инженерной, прикладной деятельности в сфере автоматического управления технологическими объектами. Может быть полезно как студентам, ориентирующимся на практическую деятельность в будущем, так и преподавателям, перед которыми стоит задача повысить мотивацию студентов к изучению теории.
Ил. 100. Табл. 1. Библиогр.: 8 назв.
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
ISBN 0564-0 © | Волгоградский государственный технический университет, 2010 |
ПРЕДИСЛОВИЕ
Дисциплина «Основы теории управления», включенная в учебные планы большинства направлений подготовки бакалавров техники и технологии, располагает в настоящее время мощными средствами научной и методической поддержки. Поэтому, уважаемый Читатель, в предисловии мы должны дать пояснения, на основе которых Вы сможете решить, пригодится ли Вам наша книга как дополнение к опубликованным ранее и общедоступным учебникам – например, [1...5]. Эти пояснения касаются трех вопросов: первый – зачем (с какой целью) написано учебное пособие; второй – как (с какой позиции) в пособии излагается материал; третий – что (какая тематика) в нем содержится.
Вначале поясним цель написания пособия. Мы адресуем его студентам и преподавателям технических вузов и их филиалов, осуществляющих подготовку бакалавров по направлению «Информатика и вычислительная техника» и по близким направлениям. Как показывает многолетний опыт преподавания в одном из таких вузов (Камышинский технологический институт (филиал) Волгоградского государственного технического университета), дисциплина «Основы теории управления», практически не имеющая дисциплин-предшественников ни в средней школе, ни в учебной программе младших курсов вуза, воспринимается студентами с большим трудом.
Блестящий трехтомник «Методы классической и современной теории автоматического управления», созданный коллективом авторов МГТУ им. под редакцией заслуженного деятеля науки РФ, д. т. н., профессора [1], является прекрасной базой для обучения студентов машиностроительных и приборостроительных специальностей вузов-флагманов, ведущих подготовку студентов к научной работе и к руководству инновационными проектами в будущем.
К сожалению, уровень сложности представленного в [1] материала превышает резервы преподавания основ теории управления, предусмотренные образовательным стандартом подготовки бакалавров. В частности, для направления «Информатика и вычислительная техника» в учебном плане на изучение дисциплины «Основы теории управления» отводится всего 119 часов, в том числе 68 часов аудиторных занятий. В таких условиях перед преподавателем стоит сложная проблема выбора соотношения между объемами знаний, предоставляемых в лекционном курсе (34 часа), в сопровождающих практических (18 часов) и лабораторных (16 часов) занятиях, а также в материалах, которые студенты должны освоить самостоятельно (51 час, в том числе 17 часов для выполнения семестрового задания).
Нужно учесть, что изучение теоретических основ наукоёмких дисциплин, к числу которых относится дисциплина «Основы теории управления», не имеет у некоторых учащихся технических вузов достаточной мотивации из-за прагматичности студентов бакалавриата, осознающих, что большинство выпускников будет занято в сфере эксплуатации и, возможно, в сферах наладки и усовершенствования действующих систем управления (но не в сферах науки, проектирования и преподавания).
Понимая это, мы решили отказаться от обычной схемы проведения практических занятий в форме разбора примеров и иллюстраций к теоретическому курсу (эти примеры включены в семестровое задание, выполняемое студентами самостоятельно; источником примеров служат классический учебник [2] и очень хорошо составленный сборник задач [3]).
Вместо этого мы попытались разработать тематику и методику практических занятий, подготавливающих студентов к инженерной, прикладной деятельности в сфере автоматического управления технологическими объектами. В результате в преподавании дисциплины «Основы теории управления» оказалось возможным реализовать две параллельные линии: основы теории управления (лекции и семестровое задание) и основы инженерной практики управления (практические и лабораторные занятия), причем нужно отметить, что именно благодаря практическим аспектам у многих студентов возникает интерес и к теоретическим проблемам управления.
Наш опыт преподавания основ теории управления по такой схеме показал, что можно представить учебно-методические материалы по каждой из данных линий в форме автономных пособий. Предлагаемое Вашему вниманию пособие содержит учебный материал, относящийся именно ко второй, инженерной, линии преподавания дисциплины.
Таким образом, в ответ на возможный вопрос Читателя о цели написания пособия авторы ответили бы так: они надеются на то, что изложенный в нем практический материал будет способствовать привитию студентам знаний и выработке у них некоторых навыков в области инженерных приложений теории управления. Можно также надеяться на повышение интереса студентов к теории управления как одной из важнейших дисциплин, формирующих специалиста в области кибернетики, информационных технологий и автоматизированных систем. Материалы могут принести пользу как студентам, ориентирующимся на практическую деятельность в будущем, так и преподавателям, перед которыми стоит задача повысить мотивацию студентов к изучению теории (и которые, возможно, согласятся с методикой изучения основ теории управления, используемой нами).
Следующий вопрос, который нуждается в пояснении, относится к позиции авторов, принятой для изложения практических аспектов управления. Возможны два альтернативных подхода к преподаванию основ теории управления.
Согласно первому подходу система управления в технике рассматривается как воплощение идеи, сформулированной первоначально в математической форме. Этот подход приводит к изложению основ теории управления на языке прикладной математики. Пример описания одного из свойств системы управления с этой позиции: «Данная система неустойчива, потому что некоторые корни ее характеристического уравнения имеют положительную вещественную часть».
Согласно второму подходу принципы управления рассматриваются как результат переноса физических закономерностей в мир техники. Этот подход приводит к трактовке теории управления как самостоятельной отрасли естественных наук, использующей математику как удобный язык. Пример описания того же явления с этой позиции: «Данная система управления неустойчива, поскольку ее инерционные элементы сдвигают фазу выхода по отношению к фазе входного воздействия настолько сильно, что время, в течение которого система действует в условиях положительной обратной связи, превышает время, в течение которого обратная связь отрицательна».
Можно проследить результат наличия этих двух подходов при рассмотрении научно-технической литературы по теории управления. С одной стороны – мощная теоретическая база, в которой эксплуатируются (и почти автономно сосуществуют) практически все разделы прикладной математики; сфера научных публикаций – массовая в связи с широкими перспективами новизны; сфера внедрения – узкая, чаще всего ограничивается единичными, но высокоэффективными экспериментальными системами. С другой стороны – инженерные методы расчета регуляторов с весьма ограниченным составом алгоритмов, изобретенных по аналогии с механизмами регулирования в природе; математическая база – упрощенная; сфера публикаций ограничена в связи с отсутствием новизны; сфера внедрения – массовая.
Авторы понимают, что каждый из подходов имеет стройную аргументацию, которую они не берутся ни принять полностью, ни отвергнуть полностью. Но наш опыт преподавания показывает, что в обычном техническом вузе, большинство студентов которого редко проявляет склонность к математике, изложение практических аспектов управления на основе второго («физического») подхода воспринимается легче, поскольку имеется возможность обратиться к здравому смыслу и аналогиям. Именно этот подход (в отличие от большинства учебных пособий) мы и приняли при описании центральных тем пособия, посвященных структуре систем с обратной связью и регуляторам (как линейным, так и нелинейным).
Дополнительным аргументом в пользу выбора «физического» подхода является возможность проиллюстрировать логику инженерного мышления (и, как мы надеемся, содействовать формированию такого мышления), рассматривающего задачу по схеме: от конечной цели – через процедуру анализа причин, препятствующих ее достижению, – к нахождению (часто – изобретению нового) способа ее достижения. Эта схема, принятая в пособии при описании линейных и нелинейных законов управления, создает в студенческой аудитории обстановку, в которой известные алгоритмы воспринимаются не как данность, а как результат собственного «изобретения».
Перейдем к аннотированному описанию содержания пособия, представленного восемью темами; затраты учебного времени – 18 аудиторных часов и 18 часов (из 51 часа, предусмотренного учебным планом) самостоятельной работы.
Тема 1 «Этапы работ при создании систем автоматического управления (САУ)», для изучения которой отводится 2 часа аудиторных и 2 часа самостоятельных занятий, знакомит студентов с базовым составом работ, которые должен выполнить инженер, разрабатывающий систему управления объектом:
1. Анализ структуры объекта управления: определение технологической цели его функционирования, выявление управляющих воздействий и возмущений, определение состава переменных состояния и выходов объекта.
2. Изучение принципов работы объекта: определение физических законов, на основе которых действует объект, и технологических ограничений, накладываемых на его работу.
3. Экспериментальное исследование объекта управления и составление его математической модели, ориентированной не столько на отражение принципов работы объекта, сколько на решение задачи выбора структуры и параметров системы автоматического управления.
4. Выбор структуры системы управления.
5. Разработка алгоритмов управления и контроля (измерения) выхода объекта и переменных состояния.
6. Разработка программного и технического обеспечения.
7. Определение настроечных параметров алгоритмов управления и контроля.
8. Моделирование работы автоматизированного технологического комплекса и уточнение настроечных параметров алгоритмов.
9. Наладка САУ на реальном объекте, определение реальных показателей качества управления и (при необходимости) корректировка решений по п. 3…8.
Последующие практические занятия посвящены детальному рассмотрению позиций 3...7.
Тема 2 «Сглаживание экспериментальных зависимостей. Оценка параметров модели объекта», для изучения которой отводится 2 часа аудиторных и 2 часа самостоятельных занятий, посвящена двум методам (скользящего среднего и четвертых разностей), используемым для обработки кривых разгона, искаженных помехами. Приводятся сведения об области применения каждого метода и об их настройке. Описывается процедура идентификации параметров статической и динамической модели.
Тема 3 «Построение передаточных функций. Понятие об управлении с обратной связью», для изучения которой отводится 2 часа аудиторных и 2 часа самостоятельных занятий, знакомит студентов с различными способами представления математической модели объекта, ориентированной на выбор структуры и алгоритмического обеспечения системы автоматического управления. Выявляются особенности замкнутой системы управления и поясняется (на содержательном, «физическом» уровне) роль обратной связи (регулятора) как для подавления возмущений (внешних и внутренних, параметрических), так и для ускорения динамических процессов в системах управления различного целевого назначения (в системах автоматической стабилизации, программного управления и следящих системах).
Тема 4 «Структурные преобразования САУ с перекрестными связями», для изучения которой отводится 2 часа аудиторных и 2 часа самостоятельных занятий, посвящена подробному разбору примера, иллюстрирующего технологию структурных преобразований многосвязной системы для получения общей передаточной функции САУ по каналам: «задающее воздействие – выход объекта»; «задающее воздействие – рассогласование между заданием и выходом объекта»; «возмущающее воздействие – выход объекта»; «возмущающее воздействие – рассогласование между заданием и выходом объекта».
Темы 5 – 7 «Линейные законы управления», рассчитанные на 6 часов аудиторных и 6 часов самостоятельных занятий, являются центральными темами пособия. Изложение построено таким образом, чтобы вовлечь студентов в процесс «изобретения» законов управления. Рассмотрение известных линейных законов (пропорционального (П-), интегрального (И-), пропорционально-интегрального (ПИ-), пропорционально-интегрально-дифференциального (ПИД-)) начинается с простейшего П-закона. Анализируются свойства систем управления с П-регулятором. Выявляются достоинства и причины недостатков этих систем, в результате чего обосновывается естественный переход к более сложным линейным законам. Для каждого из законов проводится исследование свойств (устойчивости и качества) систем управления различного целевого назначения (стабилизации, слежения, программного управления) как при воспроизведении задающих воздействий, так и при подавлении внешних и параметрических возмущений.
Тема 8 «Нелинейные законы управления», рассчитанная на 4 часа аудиторных и 4 часа самостоятельных занятий, дает представление о функциональных, логических, оптимизационных и параметрических законах. Используется методический прием, позволяющий студентам участвовать в «изобретении» функциональных нелинейных законов управления на основе анализа недостатков линейных законов. Раздел темы «Оптимизирующие нелинейные законы управления» дает представление (к сожалению, из-за ограничения учебного времени, очень краткое и поверхностное) об огромном и увлекательном мире синтеза алгоритмов.
К пособию прилагается компакт-диск с демонстрационными материалами (презентации, выполненные в среде Microsoft Office PowerPoint), которые могут быть использованы для проведения занятий в аудиториях, оборудованных компьютерной проекционной аппаратурой. Поскольку большинство технических вузов сталкивается с проблемой недостаточности опыта у преподавателей, которым поручается проведение практических занятий, мы посчитали целесообразным снабдить некоторые слайды заметками, включающими как советы по методике изложения отдельных позиций пособия, так и примеры из личного опыта авторов по разработке систем управления.
Возможно предоставление компьютерного и методического сопровождения как к практическим занятиям, так и к лабораторным работам, тематика которых связана с материалами, изучаемыми на практических занятиях. Заявки принимаются по адресу *****@***ru.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 1
ТЕМА: «ЭТАПЫ РАБОТ ПРИ СОЗДАНИИ САУ»
Время проведения практического занятия (аудиторные часы) – 2 часа.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: ознакомиться с базовым составом работ, которые должен выполнить инженер, разрабатывающий систему управления объектом.
Рассматриваемые вопросы:
1. Базовый состав работ для создания САУ.
2. Рассмотрение иллюстративного примера (система управления нагревательной установкой).
3. Первичные понятия о методах экспериментального исследования объектов управления.
1. Основные работы, выполнение которых необходимо для создания эффективной САУ
Общее число этапов – 9. Приведем их перечень:
1. Определение структуры объекта управления (рис. 1.1).
Рис. 1.1. Структура объекта управления
2. Изучение физических основ технологии работы объекта:
а) определение физических законов, на основе которых действует объект;
б) определение технологических ограничений на работу объекта.
Этапы 1 и 2 находятся вне теории автоматического управления.
3. Экспериментальное исследование объекта управления и составление его математической модели, ориентированной не столько на отражение физических основ работы объекта, сколько на решение задачи выбора структуры и параметров системы автоматического управления.
4. Выбор структуры системы управления. Наиболее часто используемые альтернативы:
а) управление по отклонению (с обратной связью);
б) управление с компенсацией возмущений;
в) комбинированные системы, сочетающие оба принципа.
5. Разработка алгоритмов управления и контроля (измерения) выхода объекта и переменных состояния.
6. Разработка программного и технического обеспечения.
7. Определение настроечных параметров алгоритмов управления и контроля.
8. Моделирование работы автоматизированного технологического комплекса (объекта управления + системы управления) и уточнение настроечных параметров алгоритмов.
9. Наладка САУ на реальном объекте, определение реальных показателей качества управления и (при необходимости) корректировка решений по этапам 3 – 8 или 4 – 8.
Мнемоническая запись фаз работы по созданию САУ приведена на рис. 1.2 (этапы, входящие в круг задач дисциплины «Основы теории управления», выделены заливкой):
Рис. 1.2. Фазы работы по созданию САУ
2. Пример: система управления нагревательной установкой
Объектом управления является виртуальный объект, имитирующий котельную, которая работает на угле. Автоматизируемым процессом является процесс нагрева.
Схема экспериментальной установки показана на рис. 1.3.
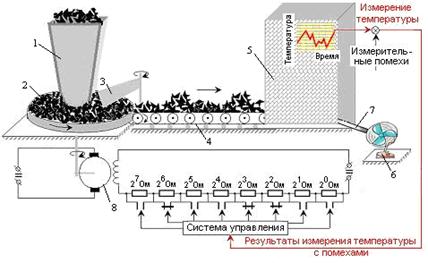
1 – бункер с углем; 2 – тарельчатый питатель; 3 – нож; 4 – транспортер топлива;
5 – печь котельной; 6 – воздуходувка; 7 – подача охлажденного воздуха;
8 – электродвигатель постоянного тока.
Рис. 1.3. Схема виртуального объекта управления
Технологической целью работы установки является обеспечение заданной температуры в условиях, когда работа установки подвержена действию возмущающих факторов. Источником возмущающих воздействий является холодный воздух, подаваемый в печь с помощью воздуходувки.
Описание принципа работы виртуального объекта. Подача угля в топку печи осуществляется по транспортеру (рис. 1.3). Топливо попадает на транспортер с вращающейся тарелки питателя; расход топлива зависит от скорости вращения тарелки и от положения ножа, отсекающего уголь с тарелки на транспортер. Регулирование расхода топлива осуществляется электродвигателем постоянного тока, вал которого соединен с валом тарельчатого питателя. Управление скоростью вращения двигателя (а через нее – скоростью вращения тарелки и, следовательно, подачей топлива в печь) осуществляется путем изменения магнитного потока обмотки возбуждения двигателя. Последовательно с обмоткой включен ряд сопротивлений, значения которых установлены согласно двоичному коду, т. е. равны 1 Ом, 2 Ома, 4 Ома, …, 128 Ом (здесь и далее числовые значения условны: приведены только для примера). Диапазон возможных значений общего сопротивления в цепи обмотки возбуждения составляет 0…255 Ом. Значению 255 Ом соответствует минимальная температура Tmin в печи (равна температуре окружающей среды, Tmin = 20 °C). Значению 0 Ом соответствует максимально достижимая температура Tmax = 1000 °C. Любые из секций общего сопротивления могут быть закорочены, благодаря чему в цепи обмотки возбуждения можно установить произвольное целое значение сопротивления из диапазона 0…255 Ом. Например, на рис. 1.3 установлено общее сопротивление (27 + 25 + + 24 + 21 + 20) = 179 Ом.
Путем изменения положения ножа тарельчатого питателя можно изменять расход топлива на транспортер при одной и той же скорости вращения тарелки. Нож питателя предполагается неподвижным.
Влияние внешней среды, приводящей к отклонению температуры от постоянного значения, имитируется подачей холодного воздуха, осуществляемой воздуходувкой.
Описание системы управления установкой. Измерения текущих значений температуры в печи, сопровождаемые измерительными помехами (рис. 1.3), поступают в систему управления, работа которой состоит в подборе такого значения суммарного сопротивления, чтобы температура в печи соответствовала заданной.
Особенности объекта с позиций теории управления: управляющее воздействие (расход топлива) подается в печь с запаздыванием, связанным с перемещением материала по транспортеру. Процесс нагрева является инерционным: мгновенное изменение температуры при изменении расхода топлива невозможно. В системе управления используются результаты измерения температуры, искаженные помехами.
3. Необходимые теоретические сведения
3.1. Понятие о кривых разгона и переходных функциях
Представим себе, что печь включается в работу с состояния, когда температура в ней равна температуре окружающей среды, а напряжение, питающее обмотку возбуждения электродвигателя, поступает через максимально возможное значение суммарного сопротивления R = Rmax = 255 Ом. Поскольку установка спроектирована так, что при R = Rmax температура в печи минимальна, изменений температуры не будет (она останется равной температуре окружающей среды).
Теперь представим себе, что печь по-прежнему включается в работу с состояния, когда температура в ней равна температуре окружающей среды, но напряжение, питающее обмотку возбуждения электродвигателя, поступает через значение суммарного сопротивления, меньшее, чем максимально возможное: R = 205 Ом < Rmax. Начнется процесс нагрева, и через некоторое время в печи установится новое значение температуры (например, 196 °С).
Пусть в момент времени, который условно обозначен нулевым (t = 0, рис. 1.4), было произведено скачкообразное (т. е. мгновенное) уменьшение сопротивления с 205 Ом до 155 Ом. Произойдет постепенный разогрев печи (рис. 1.4). Если фиксировать значения температуры в печи, то получим график изменения температуры во времени, который содержит следующие фрагменты:
· Начальная часть: несмотря на то, что сопротивление уменьшилось, изменения температуры не наблюдаются (либо из-за недостаточной чувствительности измерительного прибора, либо из-за наличия тракта передачи тепла от места его ввода до места измерения).
Определение: период времени от момента скачкообразного изменения входного воздействия (сопротивления) до момента начала фиксации изменений выходного сигнала (температуры) называется запаздыванием.
· Срединная часть: измерительный прибор фиксирует наличие изменений выходного сигнала (температуры), несмотря на то, что входное воздействие (сопротивление) не изменяется. Эти изменения объясняются наличием инерционности («памяти») объекта. В тепловых объектах эта память объясняется тем, что порции нагретого воздуха в печи смешиваются с остальным воздухом, «помнящим» прежнюю температуру.
Определение: период времени, началом которого является момент начала фиксации измерительным прибором изменений выходного сигнала, а окончанием – момент, начиная с которого показания измерительного прибора перестают изменяться, называется периодом инерционности.
· Концевая часть: измерительный прибор показывает, что выходной сигнал (температура) перестает изменяться, т. е. достигнуто новое установившееся значение выходного сигнала.
Определение: режим, при котором при постоянных входных воздействиях выходной сигнал объекта длительное время остается постоянным, называется статическим (установившимся) режимом.
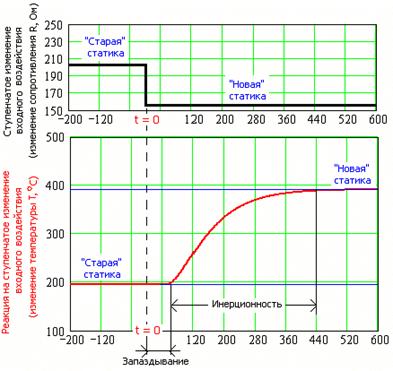
Рис. 1.4. Кривая разгона и ее элементы
Внимательно рассмотрите рис. 1.4, определите участки запаздывания, инерционности, старого и нового статического режимов.
Определение: если снять экспериментально зависимость выходного сигнала от времени, вызванную скачкообразным изменением входного воздействия (измеряя значения выхода в равноотстоящие моменты времени небольшой продолжительности), то получим кривую, называемую кривой разгона.
Кривая разгона, полученная экспериментально, обычно отличается от идеализированной кривой (рис. 1.4) тем, что эксперимент неизбежно сопровождается измерительными помехами и изменениями, вызванными дрейфом (медленным неизбежным изменением) параметров объекта (рис. 1.5).
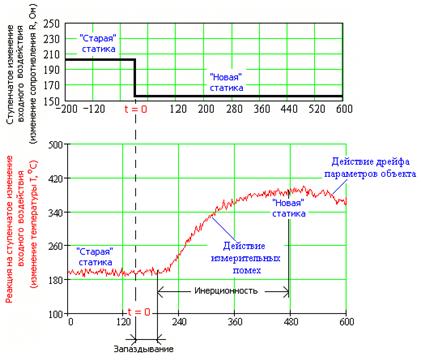
Рис. 1.5. Экспериментальная кривая разгона. Выход объекта измерен с помехами
Эти факторы ставят перед экспериментатором противоречивые задачи: с одной стороны, для устранения помех желательно снять несколько кривых разгона и затем их усреднить. Но такой опыт неизбежно будет длительным, и в течение опыта параметры объекта успеют измениться, что нарушит воспроизводимость опыта. Поэтому, с другой стороны, опыт не должен быть слишком продолжительным.
В связи с этим обычно проводят одно - или двукратное снятие кривой разгона и затем сглаживают результаты каким-либо методом.
Для чего нужно сглаживать экспериментальные кривые? Наличие помех затрудняет подбор уравнений, описывающих объект (т. е. составление его математической модели). Поэтому первым этапом обработки кривых разгона является их сглаживание, цель которого заключается в «вычленении» идеальной кривой разгона (такой, как показана на рис. 1.4) из реальной (такой, как показана на рис. 1.5). Для сглаживания используются различные методы. На практическом занятии №2 будут рассмотрены два из них: метод скользящего среднего и метод четвертых разностей (иначе – метод парабол).
3.2. Примеры математических моделей процесса нагрева
Для того чтобы получить математическую модель какого-либо объекта, всегда необходимо иметь в качестве гипотезы перечень возможных моделей (такой список формируется на базе прошлых исследований аналогичных объектов, результаты которых публикуются в научной литературе).
Процессы, непрерывные во времени, обладающие свойствами инерционности и наличием запаздывания, чаще всего описываются в терминах линейных дифференциальных уравнений. Рассмотрим четыре простейших (и наиболее употребительных в инженерной практике) модели:
1. Модель в форме дифференциального уравнения 1-го порядка без запаздывания (в теории управления такая модель называется «апериодическое звено первого порядка»).
2. Модель в форме дифференциального уравнения 1-го порядка с запаздыванием (в теории управления структура такой модели представляется последовательным соединением апериодического звена первого порядка и звена запаздывания).
3. Модель в форме дифференциального уравнения 2-го порядка без запаздывания, характеристические числа действительные (в теории управления такая модель называется «апериодическое звено второго порядка»).
4. Модель в форме дифференциального уравнения 2-го порядка с запаздыванием (в теории управления структура такой модели представляется последовательным соединением апериодического звена второго порядка и звена запаздывания).
Приведем формальное описание этих моделей.
3.2.1. Модель в форме дифференциального уравнения 1-го порядка без запаздывания (апериодическое звено первого порядка):
![]() , (1.1)
, (1.1)
где x(t) – выход модели (скаляр), в интерпретации примера (рис. 1.3) – сигнал, имитирующий температуру в печи, °C;
u(t) – один из входов объекта (скаляр), в интерпретации примера (рис. 1.3) – либо управляющее воздействие (общее сопротивление, включенное последовательно с обмоткой возбуждения двигателя, Ом), либо возмущающее воздействие (расход охлаждающего воздуха, м3/с);
T0 – постоянная времени модели, физическая размерность [T0] = c, этот параметр характеризует инерционность процесса нагрева. На рис. 1.6 показано сравнение двух моделей (1.1) с разными постоянными времени. Мы видим, что статический режим достигается тем позже, чем больше постоянная времени. Имеется полезная инженерная оценка: установившийся режим с достаточной для практики точностью достигается спустя промежуток времени, равный утроенной постоянной времени: 3T0;
k0 – коэффициент усиления модели, показывает, на какую величину изменится выход объекта в установившемся режиме, если вход изменится на единицу по сравнению со значением, при котором имела место «старая» статика. Физическая размерность коэффициента усиления для различных объектов разная:  , в рассматриваемом примере
, в рассматриваемом примере ![]() .
.
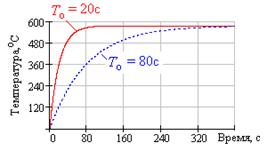
Рис. 1.6. Сравнение двух апериодических звеньев первого порядка без запаздывания
На рис. 1.7 показано сравнение двух моделей (1.1) с одинаковыми постоянными времени и разными коэффициентами усиления, входные воздействия для обеих моделей одинаковы. Мы видим, что установившийся режим для этих моделей различен: при меньшем коэффициенте усиления достигается меньшее значение выхода. Зная величину входа и коэффициент усиления, можно рассчитать установившееся значение выхода объекта.
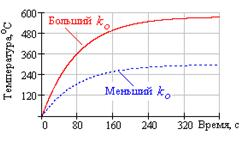
Рис. 1.7. Сравнение двух апериодических звеньев первого порядка с различными
коэффициентами усиления
Расчет приращения (по отношению к значению в «старой» статике) выхода объекта по (1.1) как реакции на входное воздействие, изменяющееся скачком при t = 0 (![]() ) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
) (при условии, что до момента времени t = 0 имел место статический режим, «старая» статика), производится по формуле:
 , (1.2)
, (1.2)
где Δx(t) = x(t) – x(0);
x(0) – значение выхода объекта в режиме «старой» статики.
Применимость простейшей модели (1.1) зависит от соотношения между запаздыванием и инерционностью объекта (рис. 1.8). Если запаздывание невелико по сравнению с периодом достижения статического режима, то модель (1.1) применима (рис. 1.8а). При увеличении запаздывания точность модели быстро ухудшается (рис. 1.8б).
|
|
а) если запаздывание невелико (по сравнению с инерционностью объекта) и если процесс в объекте начинается с высокой скоростью (не плавно), то аппроксимация простейшей моделью 1-го порядка без запаздывания вполне пригодна | б) если в объекте запаздывание существенно, то аппроксимация моделью первого порядка без запаздывания не удовлетворительна |
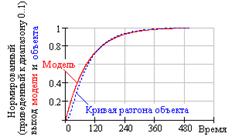
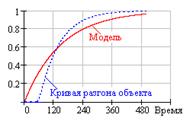
Рис. 1.8. Иллюстрация к условиям применимости модели 1-го порядка без запаздывания
3.2.2. Модель в форме дифференциального уравнения 1-го порядка с запаздыванием (последовательное соединение звеньев: апериодическое звено первого порядка и звено запаздывания):
![]() , (1.3)
, (1.3)
где t – время запаздывания, физическая размерность [t] = с; остальные обозначения такие же, как в формуле (1.1).
На рис. 1.9 показано влияние запаздывания на вид процесса, описываемого моделью (1.3); коэффициенты усиления и постоянные времени для обоих процессов, показанных на рисунке, одинаковы. Мы видим, что наиболее существенны различия в начальной стадии процесса; с течением времени эти различия уменьшаются, и статический режим в обоих случаях одинаков.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
