


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ТЕМА: «КЛАССИФИКАЦИЯ ЗАКОНОВ УПРАВЛЕНИЯ.
ЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ.
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР»
Время проведения практического занятия (аудиторные часы) – 2 часа, занятие должно проводиться с компьютерным сопровождением в связи с обширностью материала.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: изучить типовой линейный закон управления – пропорциональный (П), получить представление о базовых свойствах САУ с регулятором этого вида.
Рассматриваемые вопросы:
1. Классификация законов управления.
2. Типовой пропорциональный закон управления и его свойства.
1. Классификация законов управления
Классификация законов управления приведена на рис. 5.1.
Определение 1. Линейным законом управления называется такой, в котором значение управляющего воздействия является линейной функцией переменных состояния объекта и операторов дифференцирования и / или интегрирования переменных состояния.
Определение 2. Непрерывным законом управления называется такой, в котором управляющий сигнал является непрерывной функцией времени.
Определение 3. Цифровым законом управления называется такой, в котором управляющее воздействие сформировано в реальном времени цифровым устройством, работающим в дискретном времени и имеющим ограниченное число разрядов.
Определение 4. Типовыми называются законы управления, встроенные в регуляторы, производство которых осуществляется в промышленных масштабах. Популярность таких законов основана на инженерной практике.
Определение 5. Специальными называются законы управления, спроектированные индивидуально для использования в системах автоматизации таких объектов, для которых применение типовых законов управления не позволяет достичь требуемых значений показателей качества управления.
Рис. 5.1. Классификация законов управления
2. Линейные законы управления
Замечание. Материал раздела излагается в форме ответов на тройку вопросов (зачем? ® почему? ® как?), которую именно в такой последовательности должен задавать себе каждый инженер при выполнении любой работы. Если инженер точно знает зачем и понимает, почему не получается нужный ему результат, то опыт показывает, что он почти всегда изобретет или найдет решение, позволяющее ответить на вопрос как? Добавим, что отрицательный ответ на первый (второй) вопрос снимает необходимость размышлять над вторым (третьим) вопросом, и инженер не будет тратить время на решение бессмысленных задач.
2.1. Вводные замечания
Следуя логике инженера (поиск ответов на триаду вопросов зачем? ® почему? ® как?), зададим себе сначала вопрос: «Зачем вводить систему управления в добавление к технологическому объекту?». Ответ очевиден: без системы управления выход объекта может недопустимо отклониться от задания (например, из-за действия возмущающих факторов – внешних или внутренних, параметрических).
Ответ на второй вопрос: «Почему нельзя устранить несоответствие выхода задающему воздействию без контура обратной связи, т. е. без регулятора?» – также почти очевиден. Если бы возмущения были пренебрежимо малыми или если бы мы имели возможность их измерять, то можно было бы обойтись и без обратной связи (использовать более простую разомкнутую систему, если возмущения малы, либо применить более быстродействующую систему, основанную на компенсации возмущений, если возмущения существенны). Но мы знаем, что во многих случаях возмущения недоступны для непосредственного измерения (либо по причине отсутствия соответствующих устройств, либо из-за их высокой стоимости). В этом случае системе с обратной связью нет альтернативы.
Перейдем к поиску ответа на вопрос как? Существуют различные технологии этого поиска. Например, можно попытаться поставить задачу нахождения наилучшего (с позиций критерия, заданного пользователем) алгоритма управления. Пример такой технологии мы рассмотрим на практическом занятии, посвященном нелинейным алгоритмам управления. Здесь отметим только, что данная технология сложна и плохо типизируется (в результате не удается перейти от индивидуального проектирования алгоритма управления к типовым алгоритмам, встраиваемым в регуляторы, выпускаемые промышленностью).
Вторая технология (гораздо более простая) приводит к получению типовых решений (но, конечно, решение может сильно проиграть в качестве управления по сравнению с разработкой индивидуального проекта по первой технологии). Эта технология состоит в изобретении алгоритма и в последующем анализе его свойств.
Используем эту технологию и мы.
Рабочим инструментом такой технологии является перебор претендентов на решение, начиная с простейшего варианта. Подход основан на знаменитой максиме философа XIII века, получившей в его честь название «бритва Оккама»: не умножай сущности сложностью. В применении к нашей задаче ее трактовка такова: будем искать решение задачи воспроизведения задающих воздействий на фоне внешних и внутренних возмущений, начиная с простейшего варианта. Затем, анализируя его, выявим недостатки и будем постепенно усложнять закон управления.
Рассмотрим произвольный регулятор (или контроллер, реализующий некоторый алгоритм управления), рис. 5.2. Обозначим e(t) = g(t) – y(t) – рассогласование между задающим воздействием g(t) и выходом объекта y(t). Мы видим, что входом в регулятор является рассогласование, а выходом – управляющее воздействие u(t).


Рис. 5.2. Вход и выход регулятора в структуре САУ
Понятно, что функцией регулятора является преобразование входного сигнала (рассогласования e(t) = g(t) – y(t)) в управляющее воздействие u(t). Следуя «бритве Оккама», зададим себе вопрос: какая из известных нам функций является простейшей? Ответ очевиден – линейная. С нее и начнем: попытаемся использовать эту простейшую функцию для генерации законов управления.
2.2. Общая форма линейных законов управления
Общая форма линейного закона управления:
![]() , (5.1)
, (5.1)
где kp, ki1, ki2, kd1, kd2 – настроечные параметры закона, позволяющие изменять и настраивать качество управления (соответственно – при пропорциональной, интегральных и дифференциальных составляющих).
Далее, следуя «бритве Оккама», выберем самый простой из линейных законов (5.1). Понятно, что простейшим вариантом является частный случай (5.1), в котором отсутствуют слагаемые с интегралами и производными.
Поставим задачу исследования свойств системы, оборудованной самым простым вариантом регулятора, получившего название пропорциональный (П-) регулятор.
3. Кривая разгона П-регулятора
Из (5.1) (при отсутствии слагаемых с интегральными и дифференциальными составляющими) следует П-закон управления и соответствующая ему передаточная функция П-регулятора WП(p):
![]() . (5.2)
. (5.2)
С позиций классификации элементарных звеньев П-регулятор представляет собой безынерционное звено (простейшее в перечне элементарных звеньев).
Регулятор включается последовательно с объектом. Структурная схема САУ с регулятором приведена на рис. 5.3. Для простоты дальнейших выкладок будем полагать, что возмущающее воздействие f(t) методами структурных преобразований приведено ко входу объекта, поэтому передается на выход по тому же каналу и с той же передаточной функцией, что и задающее воздействие g(t).
Входом в регулятор служит рассогласование e(t) = g(t) – y(t) между задающим воздействием g(t) и выходом объекта y(t). Кривые разгона, соответствующие различным настроечным параметрам kp представлены на рис. 5.4 (кривая разгона, согласно ее определению, является реакцией на постоянное воздействие, поступающее на вход; в данном случае представим себе испытательный стенд с регулятором, на котором на вход регулятора подается ступенчатый сигнал).
Рис. 5.3. Структура САУ с П-регулятором
Рис. 5.4. Кривые разгона П-регулятора
4. Исследование свойств системы управления с П-регулятором
Следуя логике «зачем?® почему?® как?», зададим себе вопрос: «А зачем исследовать свойства системы управления с регулятором определенного вида?» Ответ состоит в том, что обнаруженные достоинства помогут определить область применения регулятора, а недостатки послужат стимулом для поиска решений, направленных на их устранение.
Цели исследований свойств системы с П-регулятором – выяснить:
1. Насколько точно воспроизводит система с П-регулятором постоянное задающее воздействие?
2. Насколько выше качество управления в системе с П-регулятором (по сравнению с разомкнутой системой)?
3. Понижается или повышается чувствительность системы с П-регулятором к неизбежным неточностям сведений о параметрах объекта (по сравнению с разомкнутой системой)?
Исследования и ответы на поставленные вопросы
Обозначим передаточную функцию объекта Wo(p) и будем считать, что она имеет следующую форму:
![]() , (5.3)
, (5.3)
где Q(p) – полином заданной степени оператора Лапласа p;
ko – коэффициент усиления объекта.
Примечание: такая форма очень типична и на практике встречается чаще всего; например, такую форму мы встречали при описании объекта нагрева, см. практическое занятие 1, формулы (1.1) и (1.8), для которых Q(p) является полиномом 1-го и 2-го порядков соответственно.
Дальнейшие выкладки проведем по следующей схеме, типичной для анализа САУ:
Шаг 1. Составим общую передаточную функцию замкнутой САУ.
Шаг 2. По ней получим описание работы САУ в пространстве оператора Лапласа.
Шаг 3. Считая, что на вход САУ поступают постоянные во времени воздействия (задающее g(t) = g = const и возмущающее f(t) = f = const), найдем значение выхода САУ в статике (используя двойственность, «зеркальность» переменных время и оператор Лапласа). Для этого положим p = 0 (что и будет соответствовать статике, t ® ∞).
Шаг 4. Сравним выход САУ с заданием и установим, имеет ли место статическая ошибка по каждому из каналов (по каналам g(t) ® y(t) и f(t) ® y(t) передачи задающего и возмущающего воздействий на выход соответственно).
Шаг 5. Если обнаружим, что статическая ошибка имеет место, то постараемся найти прием для ее устранения. Посмотрим, можно ли обеспечить отсутствие статической ошибки по каждому из каналов.
Шаг 6. Рассчитаем по такой же схеме статическое значение выхода объекта в разомкнутой системе, т. е. такой, в которой регулятора нет.
Шаг 7. Предположим, что значение коэффициента усиления ko отклоняется от принятого в расчетах (из-за неизбежных ошибок идентификации) на величину Δko, и проанализируем, в какой системе (с регулятором или в разомкнутой) эта неточность сильнее влияет на величину отклонения выхода от задания. Сделаем вывод о чувствительности САУ по отношению к неточностям определения коэффициента усиления объекта.
4.1. Выполнение шага 1: составление общей передаточной функции замкнутой САУ
Используя теорему 3 алгебры структурных преобразований (о передаточной функции САУ, охваченной отрицательной обратной связью), получим (полагая, как отмечалось выше, что возмущение приведено ко входу объекта):
 по каналу
по каналу  , (5.4)
, (5.4)
 по каналу
по каналу  . (5.5)
. (5.5)
4.2. Выполнение шага 2: получение описания работы САУ в пространстве оператора Лапласа
Используя формулу для передаточной функции и принцип суперпозиции (реакция линейной САУ на сумму входных воздействий равна сумме реакций САУ на каждое воздействие в отдельности), получим модель «вход–выход» в пространстве оператора Лапласа:
![]() , (5.6)
, (5.6)
где G(p), F(p) – соответственно изображения по Лапласу задающего g(t) и возмущающего f(t) воздействий.
В рассматриваемом случае входные воздействия постоянны, поэтому, согласно свойству преобразования Лапласа, G(p) = g = const, F(p) = f = const.
Используя (5.6), (5.4) и (5.5), получим:
![]() . (5.7)
. (5.7)
4.3. Выполнение шага 3: определение значение выхода САУ ystatic в статике
Для этого в (5.7) нужно положить p = 0 (это соответствует t ® ∞). Все степени p в Q(p) превратятся в нули, поэтому:
![]() . (5.8)
. (5.8)
4.4. Выполнение шага 4: сравнение выхода с заданием в статике, проверка наличия статической ошибки: estatic = g – ystatic = 0?
Из (5.8) видно, что выход объекта отличается от задания, и это отличие тем меньше, чем больше коэффициент усиления регулятора (словами инженера – чем глубже обратная связь).
В пределе при бесконечно большом параметре регулятора (kp® ∞) получается, что статический режим точно соответствует заданию, несмотря на наличие возмущений:
 . (5.9)
. (5.9)
Казалось бы, чем больше параметр kp, тем лучше качество управления. Но, к сожалению, kp влияет не только на статику, но и на динамику процесса. На рис. 5.5а показаны графики отработки ступенчатого изменения задающего воздействия (возмущений нет) при двух значениях kp. Мы видим, что статическая ошибка для процесса с большим kp меньше. Но другие показатели качества управления (колебательность и перерегулирование) ухудшились. При недопустимо большом kp статический режим вообще не достигается, а динамика становится неустойчивой (рис. 5.5б).
а) статическая ошибка уменьшается, колебательность увеличивается | б) при недопустимо большом значении kp САУ теряет устойчивость |
Рис. 5.5. Иллюстрация влияния увеличения параметра kp П-регулятора на качество
отработки задания (возмущение отсутствует)
Аналогичные выводы можно сделать и при рассмотрении качества подавления возмущений. Мы видим (рис. 5.6), что чем больше kp, тем меньше проявляется влияние возмущения на статическое значение выхода, но тем сильнее выражаются явления колебательности, увеличивается перерегулирование и при недопустимо большом значении kp наступает неустойчивость.
| б) при недопустимо большом значении kp САУ теряет устойчивость |
Рис. 5.6. Иллюстрация влияния увеличения параметра kp П-регулятора на качество
подавления возмущения (задающее воздействие – нулевое)
Замечания:
1. Нужно обратить внимание на необходимость выбора настроечного параметра регулятора kp, исходя из компромисса между качеством статического режима и качеством динамики. Например, при завышенном kp (даже для устойчивого управления) могут произойти нарушения технологического режима, если перерегулирование будет недопустимо большим.
2. Также нужно подчеркнуть возможность определения kp, при котором достигается наибольшее быстродействие системы (минимум времени переходного процесса). Если kp слишком мал, перерегулирование будет небольшим, но процесс достижения статики будет вялым и время переходного процесса (т. е. время, в течение которого статический режим будет достигнут с заранее заданной точностью, см. рис. 3.10а) будет большим. Если kp слишком высок (но САУ устойчива), то начальный участок динамического процесса будет «резвым» (рис. 5.5а), но время переходного процесса окажется снова большим из-за колебаний выхода, не укладывающихся в трубку статики. Если построить зависимость времени переходного процесса от значения kp, то мы обнаружим наличие минимума. Таким образом, вводится понятие оптимальной настройки параметров регулятора. Критериев настройки может быть много. Для систем управления, целью которых является стабилизация выхода объекта, естественным критерием является время переходного процесса (возможно, при ограничениях на величину перерегулирования).
Отметим, что зависимость времени переходного процесса от kp не во всей области изменения kp является выпуклой и неразрывной. Возможно существование зоны, в которой малые изменения kp приводят к значительным изменениям времени переходного процесса (рис. 5.7). Причину этого поясняет рис. 5.8.
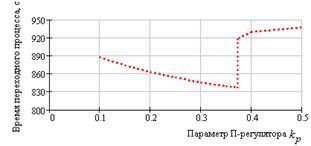
Рис. 5.7. Характер зависимости времени переходного процесса от значения настроечного параметра П-регулятора
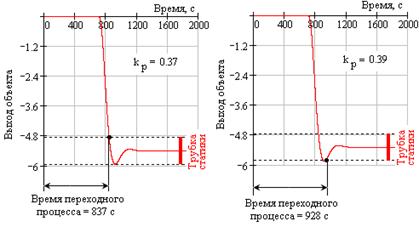
а) трубка статики охватывает весь интервал перерегулирования | б) интервал перерегулирования не укладывается в трубку статики |
Рис. 5.8. Резкое изменение времени переходного процесса при небольших изменениях
настроечного параметра П-регулятора kp
Мы видим, что при kp = 0.37 (рис. 5.8а) вход в трубку статики происходит при первом, «верхнем» пересечении границы трубки, поэтому часть процесса изменения выхода объекта, имеющая перерегулирование, укладывается внутри трубки. При изменении параметра настройки всего на 5 % (kp = 0.39, рис. 5.8б) картина существенно иная: вход в трубку статики происходит на втором, «нижнем» пересечении границы трубки, поэтому время переходного процесса увеличивается сразу на 10 % (т. е. коэффициент чувствительности времени переходного процесса к изменению настроечного параметра ![]() регулятора равен 2; здесь Δtprocess – приращение времени переходного процесса, соответствующее изменению настроечного параметра kp на величину Δkp). Значение kp, соответствующее «перескоку» от одной границы трубки статики к другой, приводит к разрыву (первого рода) зависимости времени переходного процесса от значения kp.
регулятора равен 2; здесь Δtprocess – приращение времени переходного процесса, соответствующее изменению настроечного параметра kp на величину Δkp). Значение kp, соответствующее «перескоку» от одной границы трубки статики к другой, приводит к разрыву (первого рода) зависимости времени переходного процесса от значения kp.
При дальнейшем изменении kp также возможны нарушения выпуклости из-за колебаний значений выхода вокруг статического значения (возможны «перескоки» между границами трубки статики при небольших изменениях настроечного параметра kp).
Наличие разрывов в зависимости времени переходного процесса от kp затрудняет постановку задачи определения наилучшего значения настроечного параметра: если ориентироваться на минимальное время переходного процесса, то в процессе работы регулятора из-за неизбежных изменений параметров объекта реальное быстродействие системы может оказаться значительно больше минимально возможного. Отсюда следует, что настроечный параметр целесообразно выбрать не в оптимуме, а левее оптимума (с запасом на возможные изменения параметров объекта), т. е. намеренно занизить значение настроечного параметра регулятора. Проигрыш, как показывает рис. 5.7, не будет слишком велик: на участке непрерывности левее оптимума небольшие изменения параметра kp не вызывают больших изменений времени переходного процесса. Альтернативой намеренного занижения значения настроечного параметра является введение механизма непрерывной адаптации системы в процессе ее функционирования.
4.5. Выполнение шага 5: нахождение приема, позволяющего устранить статическую ошибку в воспроизведении задающего воздействия
Возвратимся к формуле (5.8) и рассмотрим ее частный случай: работу системы управления, в которой отсутствуют возмущения, f = 0. В этом случае статическое значение выхода ystatic не соответствует заданию, имеет место статическая ошибка:
![]() (5.10)
(5.10)
Но мы видим, что объект можно «обмануть», предложив ему вместо задающего воздействия значение ![]() . Тогда статическое значение выхода объекта будет точно соответствовать заданию g:
. Тогда статическое значение выхода объекта будет точно соответствовать заданию g:
![]() . (5.11)
. (5.11)
Мы получили полезный инженерный прием: подавать задающее воздействие на элемент сравнения не непосредственно, а через безынерционное звено (усилитель) с передаточной функцией (коэффициентом усиления): ![]() .
.
Получим структурную схему (рис. 5.9), в которой САУ с П-регулятором не имеет статической ошибки воспроизведения задающего воздействия.
Рис. 5.9. Структура САУ с П-регулятором и корректирующим звеном
Замечание. Этот пример может служить иллюстрацией полезности схемы рассуждений, состоящей в поиске последовательных ответов на тройку вопросов «зачем? ® почему? ® как?».
Зачем? Чтобы попытаться устранить статическую ошибку.
Почему она имеет место? Потому что на вход объекта подается не задающее воздействие, а его значение, умноженное на коэффициент  , см. (5.11).
, см. (5.11).
Как устранить ошибку? Ответ очевиден: подать на вход звена сравнения «обманное» задающее воздействие; для этого исходное задающее воздействие нужно подать через усилитель с коэффициентом ![]() .
.
Теперь посмотрим, поможет ли тот же прием для устранения статической ошибки, связанной с подавлением неизмеряемого возмущения. Для этого проанализируем частный случай формулы (5.8), в котором задающее воздействие g = 0:
 . (5.12)
. (5.12)
Мы видим, что полное подавление возмущающего воздействия в системе с П-регулятором невозможно (достигается только при kp® ∞, а это, как мы уже отмечали, ведет к неустойчивости). Инженер, обнаруживший это, найдёт ответы на вопросы зачем? и почему? и станет искать ответ на вопрос как? путем замены закона управления, реализуемого регулятором.
Примечание: если возмущение можно измерить, то лучше вместо структуры с обратной связью использовать структуру с другим принципом организации – структуру с компенсацией возмущения.
Итак, запомним, что в САУ с П-регулятором:
1. Статическая ошибка воспроизведения постоянного задающего воздействия может быть устранена путем ввода корректирующего усилителя в структуру САУ.
2. Статическая ошибка, возникающая из-за действия возмущений, принципиально неустранима. Естественно, такое свойство может оказаться неприемлемым для систем, в которых требуется высокая точность воспроизведения задающих воздействий.
4.6. Выполнение этапа 6: расчет статического значения выхода объекта в разомкнутой системе
Цель выполнения этапа (ответ на вопрос зачем?) – получить базу для сравнения: ведь если окажется, что в системе без регулятора качество управления лучше, чем в системе с обратной связью – то зачем применять систему с регулятором? Структура разомкнутой системы показана на рис. 5.10. Для простоты рассмотрим случай, когда возмущения нет, а на вход объекта подается постоянное задающее воздействие gраз(t).
Рис. 5.10. Структура разомкнутой САУ
В этом случае изображение выхода Yраз(p) объекта разомкнутой САУ имеет вид:
![]() . (5.13)
. (5.13)
Величину gраз(t) выберем из условия, чтобы в статике выход объекта был равен заданию (такому же, как в замкнутой САУ, т. е. g). Статический режим (t ® ∞) соответствует значению оператора Лапласа p = 0. Получим:
![]() .
.
Отсюда
 . (5.14)
. (5.14)
Мы видим, что статический режим можно обеспечить без ошибки (конечно, если мы точно знаем коэффициент усиления объекта ko). Зачем же тогда обратная связь? Мы уже отвечали на этот вопрос на практическом занятии № 3: а) для подавления внешних возмущений; б) для подавления внутренних, параметрических, возмущений; в) для ускорения динамики перехода с одного статического режима на другой.
Примечание: полезно обратиться к рис. 3.7, 3.8, 3.9, приведенным в описании практического занятия № 3.
4.7. Выполнение шага 7: сравнение чувствительности разомкнутой системы с чувствительностью системы с П-регулятором по отношению к коэффициенту усиления объекта
Как мы только что отметили, см. (5.14), достижение требуемого значения выхода объекта базируется в разомкнутой системе на точных сведениях о коэффициенте усиления объекта ko.
Определение параметра корректирующего усилителя (уничтожающего статическую ошибку воспроизведения задания) для системы с П-регулятором также требует, чтобы коэффициент усиления объекта ko был известен точно.
Но на практике этот параметр практически никогда не может быть известен точно (в частности, потому что он определяется по экспериментальным данным, подверженным искажениям и погрешностям). Поэтому точное воспроизведение задающего воздействия и в замкнутой, и в разомкнутой системе недостижимо.
Постановка вопроса зачем? Нужно проверить, насколько чувствительно значение выхода объекта к его коэффициенту усиления ko в разомкнутой САУ и в системе с обратной связью. Если окажется, что последняя более чувствительна, чем разомкнутая, то это будет контраргументом против практичности системы с обратной связью.
Ответ на вопрос: «почему требуется такое исследование?» – очевиден: без оценки влияния неизбежных неточностей в определении коэффициента усиления объекта ko нельзя заключить: а) насколько эффективна мера, состоящая во введении корректирующего усилителя в структуру с П-регулятором; б) ослабляет или (наоборот) подчеркивает обратная связь влияние неточностей определения ko на качество воспроизведения задания по сравнению с разомкнутой системой.
Ответ на вопрос как? строится по следующей схеме:
1. Предполагаем, что значение коэффициента усиления объекта ko известно с точностью до погрешности Δko, а расчеты задающего воздействия gраз для разомкнутой системы и корректирующего коэффициента  проведем в предположении, что коэффициент усиления объекта равен ko.
проведем в предположении, что коэффициент усиления объекта равен ko.
2. Рассчитываем, чему равно значение выхода объекта в статике ystatic в зависимости от величины погрешности Δko определения ko, для разомкнутой системы и для САУ с П-регулятором.
3. Сравниваем результаты и делаем выводы.
Выполнение схемы:
1. Зависимость статического значения выхода объекта от погрешности Δko определения коэффициента усиления объекта ko рассчитаем для разомкнутой системы так:
![]() . (5.15)
. (5.15)
Переходя к относительной погрешности Δko/ko определения коэффициента усиления ko объекта, получим:
![]() , (5.16)
, (5.16)
где Δyраз_статич = yраз_статич – g – абсолютная ошибка воспроизведения задающего воздействия в разомкнутой системе.
Из (5.16) мы видим, что на один процент неточности сведений о коэффициенте усиления объекта ko приходится один процент отклонения выхода от задания (коэффициент чувствительности выхода объекта к отклонению фактического значения ko от принятого в расчете задающего воздействия для разомкнутой системы равен единице).
Результат расчета показывает, что добиться высокой точности воспроизведения задания в разомкнутой системе трудно: обычно коэффициент усиления объекта известен с погрешностью порядка 10 – 15 %; во многих системах 10 – 15 %-ная погрешность воспроизведения задания недопустима (хотя, конечно, есть примеры, особенно в бытовых приборах, когда и такая погрешность не опасна).
2. Аналогичную зависимость для САУ с П-регулятором рассчитаем так:
![]() . (5.17)
. (5.17)
Переходя к относительной погрешности Δko/ko, получим:
 , (5.18)
, (5.18)
где a = 1+ ko∙kp, Δystatic = ystatic – g.
Мы видим, что относительная ошибка (5.18) воспроизведения выхода объекта в САУ с П-регулятором отличается от относительной ошибки (5.16) в разомкнутой САУ коэффициентом
 , (5.19)
, (5.19)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
