


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 а) б)
а) б)
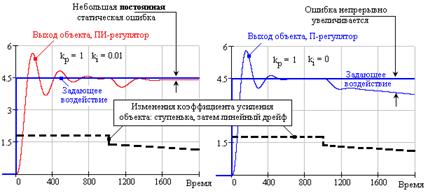
Рис. 6.11. Сравнение чувствительности САУ с ПИ-регулятором (рис. а) и САУ с
П-регулятором (рис. б). Настройки П-составляющей в обеих САУ одинаковы
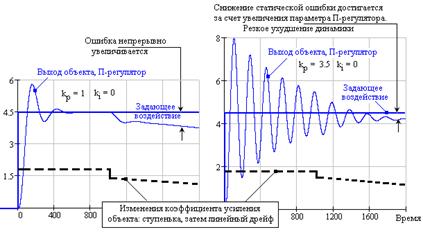
Рис. 6.12. Снижение чувствительности САУ с П-регулятором к изменению коэффициента усиления объекта за счет увеличения значения настроечного параметра kp. Резкое
ухудшение динамики
На рис. 6.13 представлены результаты сравнения чувствительности ПИ - и И-регуляторов. Мы видим, что если использовать настроечный параметр И-регулятора ki, такой же, как коэффициент при И-составляющей ПИ-регулятора (рис. 6.13б), то качество динамики САУ получится неудовлетворительным (сильная колебательность и недопустимое перерегулирование). Если же снизить ki И-регулятора так, чтобы уменьшить перерегулирование до приемлемого значения, то величина статической ошибки получится больше, а быстродействие – существенно ниже, чем в САУ с ПИ-регулятором.
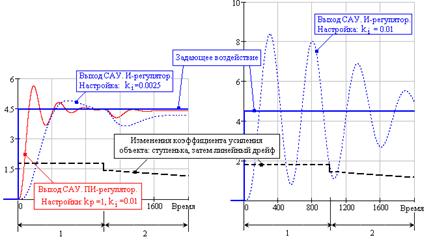
1 – участки отработки задающего воздействия при постоянном коэффициенте усиления объекта; 2 – участки отработки ступенчатого параметрического возмущения (скачкообразное уменьшение коэффициента усиления объекта и линейный дрейф на уменьшение).
а) в САУ с И-регулятором постоянная статическая ошибка больше, а быстродействие ниже, чем в САУ с ПИ-регулятором; для САУ с И-регулятором ki выбран из условия достижения статического режима за то же время, что и в САУ с ПИ-регулятором | б) в САУ с И-регулятором параметр настройки ki тот же, что и при И-составляющей в САУ с ПИ-регулятором; качество динамики неудовлетворительное из-за сильной колебательности и недопустимого перерегулирования |
Рис. 6.13. Сравнение качества отработки параметрического возмущения (ступенька и
линейный дрейф) в САУ с ПИ - и И-регуляторами
Таким образом, ПИ-регулятор в чувствительности к параметрическим возмущениям также выигрывает как по сравнению с П-регулятором (не допускает роста рассогласования между заданием и выходом при линейном дрейфе коэффициента усиления объекта), так и по сравнению с И-регулятором (при одном и том же значении перерегулирования существенно повышает быстродействие отработки задающих воздействий и снижает статическую ошибку из-за дрейфа коэффициента усиления объекта).
4.3. Использование ПИ-закона в системе программного управления
Результаты анализа использования ПИ-закона в системе программного управления представлены на рис. 6.14. Напомним, что в системе программного управления (в отличие от систем автоматической стабилизации) главным режимом является не статика, а динамика: задающие воздействия изменяются настолько часто, что статический режим САУ может не достигаться. Задающее воздействие в системах программного управления заранее, до начала управления, известно (т. е. задан его график на весь период управления). Пример системы программного управления – САУ закалкой стальных изделий. Естественно, графики задающих воздействий очень разнообразны и не типизируются. Для испытаний пригодности закона управления используются типовые тестовые сигналы (например, синусоидальные). Мы выберем задающее воздействие в форме, сложной для воспроизведения: меандровый сигнал (т. е. последовательность периодических изменений с прямоугольными участками, рис. 6.14).
Мы видим (рис. 6.14), что (как мы и предполагали) точность этого воспроизведения сильно зависит от периодичности смены значения меандра: от очень хорошего (2000 с) до совершенно неудовлетворительного (100 с). По мере увеличения частоты меандра растет отставание выхода объекта по фазе – вплоть до почти противофазности при периодичности смены значений меандра 100 с.
Замечание. Это явление объясняется инерционностью объекта управления. Для преодоления инерционности нужно было бы повысить коэффициент kp при пропорциональной части ПИ-закона, но предел этому увеличению ставит появление сильного перерегулирования и даже неустойчивости.
Таким образом, ПИ-закон управления не всегда может быть успешно использован в системах программного управления: при несоответствии частотных свойств задающего воздействия частотным свойствам объекта управления не удается найти значения настроечных параметров ПИ-регулятора, при которых точность воспроизведения изменяющегося задающего воздействия была бы удовлетворительной (повышение коэффициента при пропорциональной части с целью преодоления инерционности объекта приводит к недопустимому перерегулированию или даже к неустойчивости).
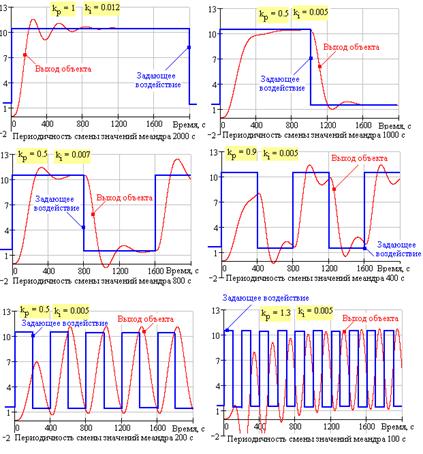
Рис. 6.14. Качество САУ с ПИ-регулятором. Отработка меандрового задающего воздействия
4.4. Использование ПИ-закона в следящей системе
Проанализируем перспективы использования ПИ-закона в следящей системе. Напомним, что в следящих системах (в отличие от систем программного управления) задающее воздействие заранее неизвестно; оно формируется в реальном времени, в ходе работы объекта (пример объекта, для которого используется следящая система – манипуляторы). Мы ожидаем, что качество работы САУ с ПИ-регулятором будет зависеть от того, насколько «гладким», медленно изменяющимся во времени (а, следовательно, предсказуемым) является задающее воздействие.
Во многих следящих системах задающее воздействие, являясь неизвестным, не относится к числу случайных процессов, подчиняющихся законам теории вероятностей. Но для тестирования ПИ-закона мы выберем задающие воздействия именно в форме случайного процесса, т. к. для него имеется возможность количественно измерить степень предсказуемости будущих значений и, благодаря этому, проследить, как она влияет на качество САУ.
Напомним, что наиболее употребительным «измерителем» степени связи будущих значений задающего воздействия z(t) (случайного процесса) с текущим значением является период спада нормированной корреляционной функции Kz(q ) до значения 0.3…0.4. Напомним понятие «период спада».
Из курсов «Теория вероятностей», «Математическая статистика» и «Теория случайных функций» известно, что нормированная корреляционная функция (т. е. такая, значения которой принадлежат интервалу [ –1;1]) определяется формулой:
 (6.12)
(6.12)
На рис. 6.15 показаны графики одного и того же случайного процесса с двумя различными сдвигами времени q между ними. Мы видим, что если «будущее» опережает «настоящее» не намного (рис. 6.15б), то по текущим значениям можно почти точно это «будущее» предсказать (рис. 6.15а и рис. 6.15б очень сходны). Отдаленное будущее (рис. 6.15в) уже ничем не напоминает текущие значения, и предсказать можно только среднее значение (математическое ожидание) случайного процесса.
Примечание: эти рассуждения справедливы только для стационарного случайного процесса, т. е. такого, в котором его статистические характеристики (в частности, математическое ожидание, дисперсия и др.) постоянны.
Если вычесть из z(t) его среднее значение, получим так называемый центрированный случайный процесс ![]() его среднее значение равно 0 (именно такие процессы показаны на рис. 6.15). Зададимся q, вычислим
его среднее значение равно 0 (именно такие процессы показаны на рис. 6.15). Зададимся q, вычислим ![]() произведения
произведения ![]() , а затем усредним эти произведения. Если
, а затем усредним эти произведения. Если ![]() почти совпадает с
почти совпадает с ![]() то знаки этих значений почти всегда будут одними и теми же, поэтому почти все произведения
то знаки этих значений почти всегда будут одними и теми же, поэтому почти все произведения ![]() будут положительными, соответственно среднее значение этого произведения будет положительным (и тем большим, чем более похожи
будут положительными, соответственно среднее значение этого произведения будет положительным (и тем большим, чем более похожи ![]() и
и ![]()
Если же ![]() и
и ![]() не сходны (как рис. 6.15а и 6.15в), то знаки значений
не сходны (как рис. 6.15а и 6.15в), то знаки значений ![]() и
и ![]() будут то совпадать, то различаться. Поэтому произведения
будут то совпадать, то различаться. Поэтому произведения  будут иметь для разных t разные («пестрые») знаки, соответственно среднее значение произведения будет малым (и тем ближе к нулю, чем менее сходны
будут иметь для разных t разные («пестрые») знаки, соответственно среднее значение произведения будет малым (и тем ближе к нулю, чем менее сходны ![]() и
и ![]()
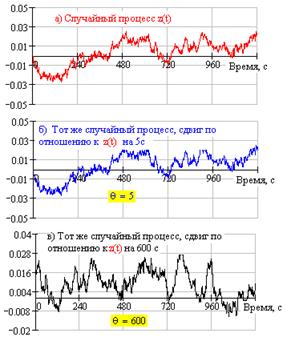
Рис. 6.15. Иллюстрация к измерению связи текущих и будущих значений случайного
процесса
Таким образом, корреляционная функция (числитель которой как раз и есть среднее значение произведения , см. (6.12)) может показать, насколько сильна связь между текущим значением случайного процесса z(t) с его будущим значением z(t + q ). Для того чтобы сравнивать различные случайные процессы между собой, корреляционные функции приводят к интервалу [–1;1] путем деления на дисперсию (как в (6.12)). Практически можно считать, что значения z(t + q ) и z(t) не связаны между собой, если значение корреляционной функции Kz(q ) меньше 0.4.
Определение: величина интервала [0; q *] называется периодом спада корреляционной функции, если  | Kz(q ) | < 0.4.
| Kz(q ) | < 0.4.
Проведем испытания следящих систем с ПИ-регулятором, задающие воздействия в которых имеют различные периоды спада корреляционной функции (и, соответственно, различные возможности предсказать будущие значения по текущим). Результаты показаны на рис. 6.16.
 |
Рис. 6.16. ПИ-регулятор в следящей системе. Различная корреляция между текущим и будущим
(отстоящим на q тактов от текущего) значениями задающего воздействия
Мы видим (рис. 6.16), что (как мы и предполагали) точность воспроизведения стохастического задающего воздействия зависит от его степени коррелированности. По мере уменьшения времени спада корреляционной функции задающего воздействия точность снижается, качество управления ухудшается (вплоть до неудовлетворительного).
Таким образом, ПИ-закон управления не всегда может быть успешно использован в следящих системах: если время спада корреляционной функции задающего воздействия существенно меньше показателя, характеризующего инерционность объекта управления (например, суммы постоянных времени – удобный измеритель инерционности для объектов с апериодическими переходными функциями), то качество воспроизведения задающего воздействия будет неудовлетворительным.
Замечание (к понятию «неудовлетворительное качество управления»). Измерения качества основаны на вычислении нормированной взаимной корреляционной функции между задающим воздействием и выходом объекта. Эта функция достигает максимального значения при некотором сдвиге во времени между значениями задающего воздействия и выхода объекта (сдвиг объясняется тем, что выход объекта отстает по фазе от задающего воздействия из-за инерционности объекта и интегрирующих свойств регулятора). Если максимальное значение взаимной корреляционной функции не превышает 0.5, качество воспроизведения задающего воздействия системой управления считается неудовлетворительным: его отслеживание будет происходить с недопустимо большими погрешностями.
5. Сводка свойств системы управления с ПИ-регулятором
Исследования, описанные в п. 4, позволяют сделать следующие выводы: САУ с ПИ-регулятором свойственны следующие позитивные качества, благодаря которым ПИ-регулятор является самым распространенным общепромышленным регулятором:
1. Отсутствие статической ошибки: ![]() . Это свойство выгодно отличает системы автоматической стабилизации с ПИ-регуляторами от систем с П-регуляторами.
. Это свойство выгодно отличает системы автоматической стабилизации с ПИ-регуляторами от систем с П-регуляторами.
2. Хороший показатель быстродействия САУ с ПИ-регулятором. Быстродействие близко к быстродействию САУ с П-регулятором (этот показатель в САУ с П-регулятором всё же лучше). Быстродействие САУ с ПИ-регулятором гораздо выше быстродействия САУ с И-регулятором.
3. Пониженная (по сравнению с П-регулятором и И-регулятором) чувствительность САУ к неточностям сведений о коэффициенте усиления объекта (по сравнению с разомкнутой системой).
4. Широкая область применения в системах с различными целями управления – стабилизации, программного управления, слежения.
Выявлены также недостатки ПИ-закона управления:
1. Более сложная (по сравнению с П - и И-регуляторами) структура, трудности настройки параметров ПИ-регулятора (из-за наличия двух, а не одного, как в П - и И-регуляторах, настроечных параметров).
2. Возможность сильной колебательности и даже неустойчивости переходных процессов в САУ.
3. Невысокая точность воспроизведения высокочастотных задающих воздействий (в системах программного управления и слежения).
6. Нужны ли дальнейшие усложнения закона управления?
Почему не всегда удается добиться нужного качества управления за счет увеличения параметра ki ПИ-регулятора? По существу мы уже ответили на первый из вопросов триады (зачем?) в разделах 4.3 и 4.4: в системах программного управления и в следящих системах качество управления может оказаться неудовлетворительным.
Следуя триаде «зачем? ® почему? ® как?», мы должны выяснить, почему не всегда удается добиться нужного качества управления за счет очевидного приема – увеличения параметров настройки ПИ-регулятора. При исследовании переходных процессов в системе с ПИ-регулятором мы обнаруживаем, что увеличение параметра ki, отражающего вклад И-составляющей в ПИ-закон управления, может вызвать явление неустойчивости. Разберемся в его причине.
Явление неустойчивости, свойственное замкнутым системам управления, на первый взгляд кажется таинственным. В самом деле: по сравнению с объектом регулятор является «энергетическим ничтожеством» (например, мощность котлотурбинного агрегата отличается от мощности, потребляемой регулятором температурного режима в нем, в 40 млн. раз, и не случайно в теории управления мощность регулятора не учитывается совсем). Почему же это ничтожество может привести к тому, что график температурного режима огромного агрегата может оказаться графиком расходящихся колебаний – вплоть до поломки агрегата?
Замечание. Полезны примеры, в которых наблюдались неустойчивые режимы на реальном объекте. Один из таких примеров – последствия неудачной настройки регулятора уровневого режима в большом ирригационном канале, разделенном перегораживающими водорегулирующими сооружениями на отсеки. В результате неверно выбранных настроек в канале возникли волновые процессы с увеличивающейся высотой волн. Причина неустойчивости: каждая следующая волна, порожденная управляющим воздействием (изменением положения затвора водорегулирующего сооружения, подающего воду в отсек канала), оказывалась синфазной с волной, отраженной от нижележащего водорегулирующего сооружения. В результате происходило сложение амплитуд этих волн. Амплитуда новой отраженной волны оказывалась выше предыдущей, снова накладывалась на волну, порожденную регулятором, и амплитуда колебаний уровня воды в канале увеличивалась от цикла к циклу. Этот пример подводит к пониманию существа неустойчивости. Сигнал управления (включение двигателя, перемещающего затвор водорегулирующего сооружения) имеет пренебрежимо малую мощность. Но, поскольку управляющие воздействия подаются во времени так неудачно, что вызывают наложение порожденной и отраженной волн, огромная мощность объекта (а совсем не ничтожная мощность регулятора) используется для его «раскачки». Данный пример показывает, насколько опасно включать систему управления без предварительного расчета ее параметров, гарантирующего отсутствие явлений неустойчивости.
В лекционном курсе излагаются математические основы исследования устойчивости (в частности, изучаются необходимые и достаточные условия, гарантирующие устойчивость систем управления с непрерывным временем: отрицательность вещественных частей корней знаменателя передаточной функции системы). Но на практическом занятии полезно обратиться не столько к абстракциям, сколько к физической сущности явления неустойчивости.
Замечание. Прояснение физической сущности неустойчивости позволяет усилить мотивацию к изучению теоретических методов ее исследования; кроме того, удастся не только добиться понимания того, зачем совершенствовать ПИ-закон управления, но и догадаться, как это сделать, т. е. определить направление совершенствования ПИ-закона управления.
Из описания развития неустойчивых процессов в ирригационном канале, приведенного выше, можно сделать вывод, что «порча» происходит из-за неправильного наложения последствий прошлых управляющих воздействий на текущее управляющее воздействие. В ПИ-законе управления запоминание прошлых управлений производится за счет И-добавки, поэтому для простоты проанализируем причины неустойчивости в системе с И-регулятором. Напомним, что в САУ с И-регулятором управляющее воздействие u(t) пропорционально интегралу от рассогласования e(t) = z(t) – y(t) между задающим воздействием z(t) и выходом объекта y(t):
![]() , (6.13)
, (6.13)
где ki – настроечный параметр регулятора.
Мы видим, что по смыслу закона управления текущее значение управляющего воздействия аккумулирует в себе все прошлые воздействия, которые влияли на величины рассогласований в период 0 £ θ < t.
Замечание. Напомним, что такой эффект запоминания прошлых действий пропорциональному регулятору не свойствен: величина управления определяется рассогласованием только в текущий момент времени.
Рассмотрим самую простую задачу управления, целью которого является отработка ненулевых начальных условий при задающем воздействии, равном нулю (т. е. приведение объекта в состояние покоя, при котором и выход объекта, и все его производные равны нулю). Будем считать, что в момент времени t = 0 выход объекта отличается от нуля, все производные выхода равны нулю и управляющее воздействие равно нулю при t £ 0.
Варианты показаны на рис. 6.17 (намеренно в одинаковом масштабе, для иллюстрации принципиальных изменений характера процессов в системе из-за неустойчивости):
1. Управляющее воздействие отсутствует (рис. 6.17а), что соответствует значению ki = 0 в формуле (6.13).
2. Управляющее воздействие рассчитывается по формуле (6.13) при малом значении ki = ki(1) (рис. 6.17б). Явление неустойчивости не возникает, изменения выхода объекта носят апериодический характер.
3. Управляющее воздействие рассчитывается по формуле (6.13) при значении ki = ki(2) > ki(1) (рис. 6.17в), при котором явление неустойчивости также не возникает, но изменения выхода объекта носят колебательный характер.
4. Управляющее воздействие рассчитывается по формуле (6.13) при значении ki = ki(3) > ki(2) (рис. 6.17г), изменения выхода объекта также носят колебательный характер, но амплитуды колебаний возрастают от периода к периоду; имеет место явление неустойчивости.
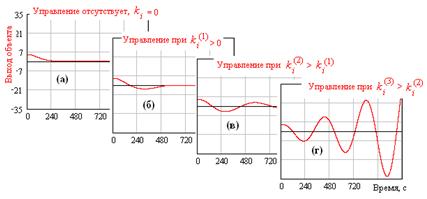
Рис. 6.17. Характер изменений выхода объекта при различных значениях параметра
настройки И-регулятора
Замечание. Полезно привести пример, иллюстрирующий природу неустойчивости. Рассмотрим процессы раскачки и торможения качелей. Для раскачки нужно в период движения качелей «вперед» вытягивать ноги вперед, а в период движения качелей «назад» подгибать ноги. Тогда малая энергия наших мускулов будет направлена согласно, синфазно с направлением собственных колебаний качелей. А для торможения нужно действовать наоборот: при движении качелей «вперед» подгибать ноги, а при движении «назад» – вытягивать их. Та же самая малая энергия мускулов будет направлена противофазно направлению собственных колебаний качелей, что приведет к затуханию колебаний. Этот пример иллюстрирует важную роль разности фаз между выходом объекта (текущим положением точки на качели) и управляющим воздействием (мускульным усилием): в зависимости от значения этой разности система управления будет вести себя либо как система с положительной обратной связью (при этом амплитуда колебаний будет увеличиваться от периода к периоду), либо как система с отрицательной обратной связью (при этом амплитуда колебаний будет уменьшаться от периода к периоду).
Выясним, какова разность фаз между выходом объекта и управляющим воздействием в системе с И-регулятором, в которой объект управления описывается дифференциальным уравнением не ниже 2-го порядка (почему не ниже – поясним чуть позднее).
1. Выход И-регулятора отстает от его входа на 0.25 периода (это легко проиллюстрировать интегралом от периодической функции sin(ω∙t) с частотой ω: после интегрирования получим [–cos(ω∙t)], т. е. периодическую функцию той же частоты, отстающую от sin(ω∙t) на 0.25 периода).
2. Если объект представляет собой инерционное звено, то его выход также отстает от входа, но это отставание зависит от частоты входного сигнала: чем больше эта частота, тем больше отставание. Природа этого отставания – наличие инерции объекта. Из лекционного курса мы знаем, что зависимость разности фаз между синусоидальным сигналом на выходе объекта, порожденным синусоидальным сигналом на его входе, называется фазочастотной характеристикой объекта. На рис. 6.18 приведены фазочастотные характеристики двух апериодических звеньев – первого и второго порядка. Мы видим, что при увеличении частоты разности фаз между выходом и входом этих объектов приближаются соответственно к 0.25 периода и к 0.5 периода (т. е. по 0.25 периода на каждый порядок уравнения, описывающего динамику объекта с апериодической переходной характеристикой).
3. Общее фазовое отставание выхода объекта от управляющего воздействия равно сумме отставаний, вызванных И-регулятором и самим объектом. Если И-регулятор используется для управления объектом 1-го порядка, то общее отставание не превысит 0.5 периода. Если же И-регулятор используется для управления объектом 2-го (или более чем 2-го) порядка, то общее отставание может оказаться больше 0.5 периода.
Рис. 6.18. Фазочастотные характеристики апериодических объектов 1-го и 2-го порядка
Посмотрим, как соотносятся графики выхода объекта и управляющего воздействия, приведенного к выходу (т. е. с учетом отставания выхода от управления по фазе) – иными словами, не того управления, которое мы подаем на вход, а управления, фактически действующего на выход объекта.
На рис. 6.19 представлены графики выхода объекта и управления, приведенного к выходу, для случая, когда, согласно частоте колебаний выхода, отставание фазы выхода объекта по отношению к его входу меньше 0.25 периода. Общее отставание графика выхода от графика управляющего воздействия при этом меньше 0.5 периода. Мы видим, что в системе с И-регулятором периодически возникают режимы, в которых знаки выхода объекта и управляющего воздействия, приведенного к выходу, совпадают. В этих режимах регулятор действует так, как если бы система управления была не с отрицательной, а с положительной обратной связью – т. е. регулятор подталкивает объект к новым колебаниям вместо того, чтобы успокаивать колебания. Но продолжительность таких режимов меньше, чем продолжительность «нормальных» режимов, в которых знаки выхода и управляющего воздействия, приведенного к выходу, противоположны. Образно можно сказать, что позитивные эффекты отрицательной обратной связи сильнее негативных эффектов положительной связи. Система управления остается устойчивой.
Рис. 6.19. Управляющее воздействие отстает по фазе от выхода объекта меньше, чем на
половину периода. Система управления устойчива
Будем увеличивать настроечный параметр регулятора ki. Частота колебаний выхода объекта при этом будет возрастать (рис. 6.17), т. к. регулятор будет стремиться изменить выход быстрее. Но тогда при некоторой частоте может оказаться, что отставание фазы выхода объекта по отношению к его входу превысит 0.25 периода (см. рис. 6.18).
Такая ситуация показана на рис. 6.20. Общее отставание графика выхода от графика управляющего воздействия превышает 0.5 периода. Мы видим, что и в этом случае в системе с И-регулятором периодически возникают режимы, в которых знаки выхода объекта и управляющего воздействия, приведенного к выходу, совпадают, т. е. система управления ведет себя так, как будто в ней используется положительная обратная связь. Но, в отличие от рис. 6.19, продолжительность таких режимов больше, чем продолжительность «нормальных» режимов, в которых знаки выхода и управляющего воздействия, приведенного к выходу, противоположны. Образно можно сказать, что позитивные эффекты отрицательной обратной связи слабее негативных эффектов положительной связи. Система управления становится неустойчивой.
Рис. 6.20. Управляющее воздействие отстает по фазе от выхода объекта больше, чем на
половину периода. Система управления неустойчива
Между двумя областями значений настроечного параметра И-регулятора, первая из которых соответствует устойчивой системе, а вторая – неустойчивой, существует значение ki, при котором продолжительность режимов совпадений знаков выхода и управления, приведенного к выходу, равна продолжительности несовпадения этих знаков. В этом случае в системе возникают незатухающие колебания (т. е. система находится на границе устойчивости, рис. 6.21).
Теперь становится понятно, почему неустойчивый режим в системе с И-регулятором не возникает (естественно, если ki > 0, т. е. если САУ задумана как система с отрицательной обратной связью), когда объект является апериодическим звеном 1-го порядка. Фазочастотная характеристика такого объекта такова (рис. 6.12), что отставание выхода объекта от входа по фазе никогда не превышает 0.25 периода. При этом общее отставание графика выхода от графика управляющего воздействия никогда не превысит 0.5 периода, продолжительность режимов совпадения знаков выхода и управления, приведенного к выходу, всегда окажется меньше, чем продолжительность «нормальных» режимов, в которых знаки выхода и управляющего воздействия, приведенного к выходу, противоположны. Процесс останется устойчивым (как на рис. 6.19) при любом положительном значении настроечного параметра И-регулятора ki.
Рис. 6.21. Управляющее воздействие отстает по фазе от выхода объекта ровно на половину периода. Система управления находится на границе устойчивости
Замечание. Обратим внимание на трудности определения разности фаз между выходом и управляющим воздействием. Эти трудности связаны с необходимостью определения частот колебаний выхода при каждом заданном значении настроечного параметра регулятора. Можно, конечно, представить себе, что эти частоты мы определим экспериментально. Но объем такого эксперимента был бы огромен, вызвал бы длительные отклонения технологических показателей от нормы и поэтому оказался бы неприемлемым. Поэтому важны теоретические методы исследования устойчивости, в которых привлекаются собственные числа, характеристические уравнения, передаточные функции и их знаменатели, критерии устойчивости.
Ответ на второй вопрос триады: «Почему не всегда удается добиться нужного качества управления в САУ с ПИ-регулятором?» – получен: прием улучшения качества, состоящий в увеличении значений настроечных параметров регулятора, может привести к неустойчивости.
7. Как усовершенствовать ПИ-закон управления?
Ответ на последний из вопросов триады «зачем? ® почему? ® как?» очевиден: нужно блокировать сдвиг фазы, вызываемый И-составляющей ПИ-закона управления. Можно предложить различные способы этой блокировки, но логика «бритвы Оккама» предписывает выбрать простейший вариант. Если интегрирование вызывает отставание фазы, то можно сразу догадаться, что опережение фазы (и тоже на четверть периода) произойдет, если в закон управления ввести дифференцирующую добавку.
Получим пропорционально-интегрально-дифференциальный (ПИД) линейный закон управления, воспринимаемый инженерами как некоторое логически законченное совершенство.
8. Контрольные вопросы
Можно ли устранить статическую ошибку регулятором, в качестве которого используется элементарное звено из группы звеньев с самовыравниванием? Каковы преимущества И-закона управления? Каковы недостатки И-закона управления? В чем ПИ-регулятор выигрывает по сравнению с П-регулятором? В чем ПИ-регулятор выигрывает по сравнению с И-регулятором? Почему ПИ-закон управления не всегда может быть успешно использован в системах программного управления? Почему ПИ-закон управления не всегда может быть успешно использован в следящих системах? Каковы преимущества ПИ-закона управления? Каковы недостатки ПИ-закона управления? Как усовершенствовать ПИ-закон управления?ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 7
ТЕМА: «ЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ.
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР»
Время проведения практического занятия (аудиторные часы) – 2 часа, занятие должно проводиться с компьютерным сопровождением в связи с обширностью материала.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: изучить типовой линейный закон управления – пропорционально-интегрально-дифференциальный (ПИД), получить представление о базовых свойствах САУ с регулятором этого вида.
Рассматриваемые вопросы:
1. Типовой ПИД-закон управления и его свойства.
2. Сводка изученных линейных законов управления.
1. Структурная схема ПИД-регулятора, его кривая разгона, закон управления и передаточная функция
В структуру ПИД-регулятора входят следующие элементы (рис. 7.1):
1. Безынерционное звено для ввода составляющей в закон управления, пропорциональной рассогласованию e(t) = g(t) – y(t) между задающим воздействием g(t) и выходом объекта y(t).
2. Идеальное интегрирующее звено для ввода составляющей в закон управления, пропорциональной интегралу от рассогласования.
3. Узел (развилка), размножающий сигнал рассогласования на два канала (канал П-составляющей и канал И-составляющей).
4. Сумматор, осуществляющий формирование управляющего воздействия (как сумму выходов каналов П - и И-составляющих).

Рис. 7.1. Структура ПИД-регулятора
Глядя на рис. 7.1, можно догадаться, что кривая разгона ПИД-регулятора (рис. 7.2) может быть построена как сумма трех кривых разгона: для П-составляющей (рис. 5.4), И-составляющей (рис. 6.2а) и Д-составляющей (которая, возможно, нуждается в пояснениях).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
