


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 7.2. Кривая разгона ПИД-регулятора как сумма кривых разгона П-, И- и Д-регуляторов
Пояснения к кривой разгона Д-регулятора. Как известно, кривая разгона является реакцией объекта на входной сигнал ступенчатой формы. Если бы можно было подать такой сигнал на вход дифференцирующего звена, то оказалось бы, что при (– ¥) < t < 0 выход дифференциатора был бы равен нулю (как производная от константы). Но и при 0 < t < (+ ¥) выход дифференциатора также был бы равен нулю по той же причине. При t = (– 0), т. е. при подходе слева, выход дифференциатора устремляется в (+ ¥), поскольку скорость нарастания входного ступенчатого сигнала бесконечно велика. При t = (+ 0) выход дифференциатора возвращается из (+ ¥) к нулю. Естественно, на практике такое развитие событий невозможно: в реальных процессах ступенчатые сигналы не встречаются. Всегда присутствует некоторая инерционность, вследствие которой сигнал, трактуемый нами как ступенчатый, на самом деле в окрестности t = 0 возрастает, хотя и очень быстро, но не мгновенно. Соответственно производная этого сигнала (т. е. выход Д-регулятора) может оказаться очень большой, но не бесконечно большой. Однако идеализация во многих задачах допустима.
Таким образом, кривая разгона ПИД-регулятора имеет 4 характерных участка (рис. 7.2):
1. До появления входного ступенчатого сигнала выход ПИД-регулятора равен нулю.
2. В момент появления входного ступенчатого сигнала выход ПИД-регулятора устремляется в бесконечность.
3. Практически в тот же момент времени выход ПИД-регулятора возвращается из бесконечности до значения, пропорционального входному сигналу (Д-составляющая «отработала» и исчезла, И-составляющая «не успела» начаться, П-составляющая определила выход регулятора).
4. Затем начинается линейный рост выхода ПИД-регулятора под действием И-составляющей, которая суммируется с постоянным во времени вкладом П-составляющей.
Закон управления, реализуемый ПИД-регулятором, получается как частный случай из общей формы линейных законов управления (5.1) (все составляющие, содержащие кратные интегралы и производные выше 1-го порядка, отсутствуют):
 , (7.1)
, (7.1)
где kp, ki, kd – настроечные параметры ПИД-регулятора, отражающие вклады П-, И - и Д-составляющих в управляющее воздействие, подаваемое на объект. Параметры kp, ki, kd являются размерными величинами:
Обычно используют дифференциальную форму ПИД-закона (получается из (7.1) дифференцированием):
 . (7.2)
. (7.2)
Передаточная функция ПИД-регулятора есть отношение изображения U(p) его выхода – управляющего воздействия u(t) – к изображению E (p) его входа – рассогласования e(t). Применяя преобразование Лапласа к (7.2), получим:
 .
.
Отсюда найдем передаточную функцию:
 . (7.3)
. (7.3)
Можно было бы получить формулу для передаточной функции, используя теорему 2 алгебры структурных преобразований (о передаточной функции звеньев, соединенных параллельно): WПИД(p) есть сумма передаточных функций безынерционного звена (П-составляющая), идеального интегрирующего звена (И-составляющая) и идеального дифференцирующего звена (Д-составляющая).
2. Свойства САУ с ПИД-регулятором
Можно было бы провести исследования свойств по той же методике, что и в п. 4 практического занятия № 6, но продуктивнее попытаться предсказать эти свойства, основываясь на роли Д-добавки, расширяющей диапазон устойчивости САУ по сравнению с ПИ-регулятором.
Преимущества ПИД-закона управления
1. В системах автоматической стабилизации главные преимущества ПИД-регулятора перед ПИ-регулятором сводятся к возможности существенно увеличить коэффициенты при П - и И-составляющих (за счет чего значительно увеличится быстродействие без увеличения перерегулирования и колебательности). Действие Д-составляющей будет заметным только в моменты резких изменений задающих воздействий и / или возмущений (при постоянных или почти постоянных внешних воздействиях производная выхода будет близка к нулю).
Рассмотрим пример отработки ступенчатого изменения задающего воздействия в САУ с двумя вариантами регуляторов – ПИ и ПИД. На рис. 7.3 показан график выхода объекта в САУ с ПИ-регулятором, настроечные параметры kp, ki которого выбраны так, чтобы обеспечить минимально возможное время переходного процесса. Стремление уменьшить время переходного процесса за счет его форсирования (увеличения kp, ki) приводит к росту колебательности и, в конечном итоге, к неустойчивости.
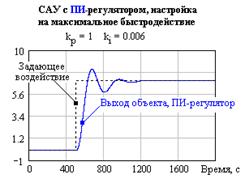
Рис. 7.3. Динамика выхода объекта в САУ с ПИ-регулятором. Настройка на максимум
быстродействия
На рис. 7.4 показан аналогичный график в САУ с ПИД-регулятором. Мы видим, что за счет введения дифференцирующей добавки область устойчивости САУ расширилась настолько, что оказалось возможным увеличить коэффициент при П-составляющей в 12 раз, а при И-составля-ющей в 5 раз (по сравнению с настройками ПИ-регулятора). За счет этого значительно уменьшилось время переходного процесса и снизилось значение перерегулирования. Чтобы подчеркнуть эффекты улучшения качества управления, на рис. 7.5 показаны оба графика.
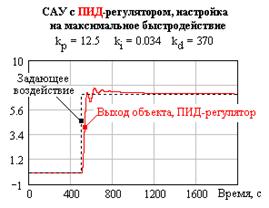
Рис. 7.4. Динамика выхода объекта в САУ с ПИД-регулятором. Настройка на максимум
быстродействия
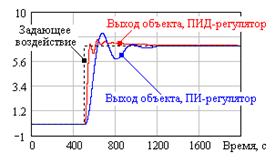
Рис. 7.5. Сравнение динамики выхода объекта в САУ с ПИ- и ПИД-регуляторами.
Настройка на максимум быстродействия
Если установить значения kp, ki для ПИ-регулятора такими же, какие использованы в ПИД-регуляторе, то система управления станет неустойчивой, что иллюстрирует благоприятное стабилизирующее влияние Д-составляющей. На рис. 7.6 – вынужденно иной масштаб, вследствие чего ступенька изменения задающего воздействия почти незаметна. Момент изменения показан.
Замечание. Если в практике работы реальной системы управления часто встречаются режимы с почти ступенчатыми изменениями задания, ПИД-закон (7.1) целесообразно подправить, исключив из него производную задающего воздействия. Получим такой закон управления:
 . (7.4)
. (7.4)
Именно для такого закона рассчитаны примеры, показанные на рис. 7.4, 7.5.
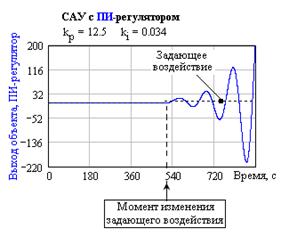
Рис. 7.6. Потеря устойчивости САУ с ПИ-регулятором. Настройки – те же, что и в
ПИД-регуляторе
Если использовать закон управления (7.1), то в момент ступенчатого изменения задающего воздействия на выходе объекта будет наблюдаться резкий скачок, направление которого противоположно направлению ступеньки задания (рис. 7.7, обратите внимание на масштаб оси абсцисс), качество управления будет неудовлетворительным. (Об этом авторы учебников по основам теории управления обычно не упоминают, поскольку при расчете примеров они чаще всего используют постоянные, а не ступенчатые входы).
2. Рассмотрим возможности ПИД-регулятора в системах программного управления. После сказанного в п. 1 становится ясно, что от ПИД-регулятора не следует ожидать заметного улучшения качества управления (по сравнению с ПИ-регулятором), если задающие воздействия – плавные функции времени (т. е. если показатели инерционности входных воздействий превышают показатели инерционности объекта). На рис. 7.8 показаны процессы отработки медленно изменяющегося задающего воздействия в САУ с ПИ-регулятором (рис. 7.8а) и с ПИД-регулятором (рис. 7.8б). Мы видим, что качество управления практически одинаковое. Следуя «бритве Оккама», посоветуем в этом случае отказаться от ПИД в пользу более простого ПИ-регулятора.
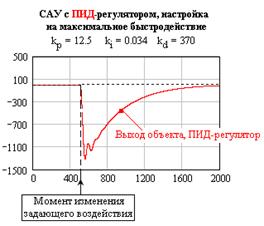
Рис. 7.7. Негативное влияние производной ступенчатого изменения задающего воздействия
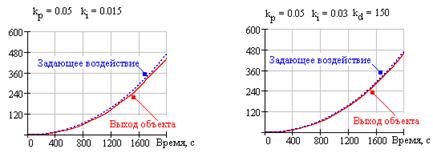
а) САУ с ПИ-регулятором, настройка на высокую точность воспроизведения задания | б) САУ с ПИД-регулятором, настройка на высокую точность воспроизведения задания |
Рис. 7.8. Сравнение качества воспроизведения медленно изменяющегося задающего
воздействия в САУ с ПИ-регулятором и в САУ с ПИД-регулятором
3. При высокочастотных изменениях задающих воздействий в системах программного управления ПИД-регулятор, в отличие от п. 2, обеспечит более высокое качество управления (но в этом случае не за счет возможности установить форсирующие параметры настройки при П - и И - составляющих без потери устойчивости, а за счет «собственного» форсирующего действия, возникающего при дифференцировании задания).
На рис. 7.9 показан процесс воспроизведения высокочастотного меандрового задающего воздействия в САУ с ПИ-регулятором. Мы видим, что качество воспроизведения неудовлетворительное: выход объекта отстает от задания почти на половину периода.
На рис. 7.10 показан аналогичный процесс в САУ с ПИД-регулятором. За счет Д-добавки качество управления существенно улучшилось. Причина – в резком форсировании процесса в моменты изменения меандра за счет введения дифференцирования задающего воздействия (в этом случае использовался алгоритм (7.4)).
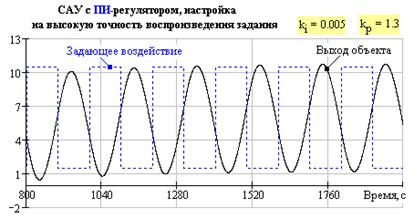
Рис. 7.9. Неудовлетворительное воспроизведение высокочастотного меандрового задания в САУ с ПИ-регулятором
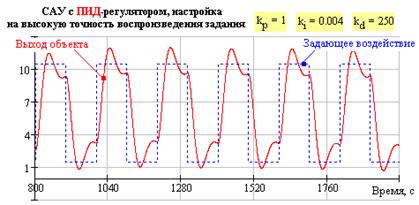
Рис. 7.10. Улучшение качества управления при воспроизведении высокочастотного
меандрового задания за счет введения Д-добавки
4. В следящих системах так же, как и в системах программного управления, преимущества ПИД-регулятора проявятся только при отслеживании высокочастотных изменений заданий (т. е. в том случае, когда период спада корреляционной функции задающего воздействия значительно меньше времени достижения нового статического режима в объекте).
На рис. 7.11 показан процесс отслеживания высокочастотного задающего воздействия в САУ с ПИ-регулятором. Мы видим, что выход объекта «не успевает» за изменениями задания, сглаживает их. Качество отслеживания низкое.
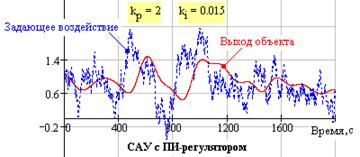
Рис. 7.11. Низкое качество отслеживания высокочастотного случайного задающего
воздействия в следящей системе с ПИ-регулятором
За счет форсированного введения производной задающего воздействия ПИД-регулятор обеспечивает гораздо более высокое качество отслеживания случайного задающего воздействия (рис. 7.12)
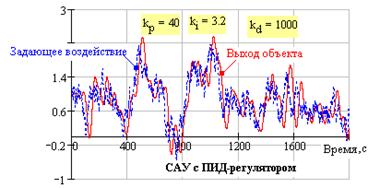
Рис. 7.12. Улучшение качества отслеживания высокочастотного случайного задающего
воздействия в следящей системе с ПИД-регулятором (по сравнению с ПИ-регулятором)
Мы рассмотрели источники преимущества ПИД-регулятора перед ПИ-регулятором в системах автоматической стабилизации, программного управления и слежения. Теперь остановимся на недостатке. Он очевиден: имеются трудности в настройке регулятора. Найти вручную такие значения сразу трех параметров (kp, ki, kd), чтобы обеспечить хорошее качество управления, – довольно трудная задача (особенно если неизвестна хотя бы ориентировочно область приемлемых значений параметров).
3. Сводка свойств системы управления с ПИД-регулятором
Для систем с ПИД-регулятором характерны следующие позитивные свойства, благодаря которым удается обеспечить приемлемое качество управления в ряде случаев, когда САУ с ПИ-регулятором неработоспособны:
1. В системах автоматической стабилизации ПИД-регулятор обеспечивает гораздо более высокое быстродействие и (одновременно) снижает значение перерегулирования (по сравнению с ПИ-регулятором). Это качество проявляется при отработке ступенчатых изменений внешних воздействий.
2. В системах программного управления и слежения ПИД-регулятор предпочтительнее ПИ-регулятора только при высокочастотных (по сравнению с частотными свойствами объекта) изменениях задающих воздействий.
3. Д-добавка способствует расширению зоны устойчивости системы управления (блокирует отставание фазы выхода системы по отношению к управляющему воздействию, вызываемое действием И-составляющей закона управления).
4. Благодаря И-составляющей ПИД-регулятор сохраняет позитивные свойства ПИ-регулятора (отсутствие статической ошибки, высокое быстродействие, пониженную чувствительность к неточностям сведений о коэффициенте усиления объекта). Д-составляющая улучшает эти свойства.
Выявлены также недостатки ПИД-закона управления:
1. Более сложная (по сравнению с П-, И - и ПИ-регуляторами) структура, трудности настройки параметров ПИД-регулятора (из-за наличия трех настроечных параметров, а не одного, как в П - и И-регуляторах, и не двух, как в ПИ-регуляторе).
2. Наличие перерегулирования при настройке параметров регулятора на максимум быстродействия.
3. Если частотный спектр задающих воздействий сильно смещен в сторону высоких частот (по сравнению с полосой пропускания объекта), то ПИД-регулятор (как и все регуляторы, рассмотренные выше) не может обеспечить хорошее качество воспроизведения заданий.
Общий вывод: поскольку ПИД-регулятор сложнее, чем рассмотренные выше, то использование ПИД-закона управления целесообразно только тогда, когда нужное качество управления не может быть обеспечено регуляторами с более простыми законами (в частности, ПИ-регулятором).
4. Нужны ли дальнейшие усложнения закона управления?
Ответов на вопрос зачем? – три, они связаны со стремлением устранить недостатки ПИД-закона, перечисленные выше.
1. Нужны механизмы автоматической настройки параметров регулятора. Такая возможность обеспечивается системами управления, обладающими механизмами адаптации (напомним, что в теории управления термин адаптация трактуется как свойство системы управления отрабатывать не только внешние, но и внутренние возмущающие воздействия). В настоящее время алгоритмы адаптации встраиваются во все современные общепромышленные цифровые регуляторы.
2. Нужны более совершенные законы управления, в которых сочетается высокое быстродействие с низким (или вообще отсутствующим) перерегулированием. В рамках линейных законов управления это в общем случае недостижимо, но можно попытаться найти решение при использовании нелинейных законов (тема следующего практического занятия).
3. Нужны алгоритмы, обеспечивающие воспроизведение высокочастотных задающих воздействий в системах программного управления и слежения.
5. Сводка изученных линейных законов управления
Различные комбинации кратных интегралов и производных высоких порядков, предусмотренные общей формой линейного закона управления (5.1), в общепромышленных регуляторах не используются в связи с трудностями настройки параметров, опасностью неустойчивости и большими погрешностями определения производных выхода объекта.
В типовой общепромышленный регулятор встраивается ПИД-закон управления, из которого можно получить все остальные законы управления, в которых не предусматривается интегрирование рассогласования выше однократного и дифференцирование рассогласования выше 1-го порядка. Обобщенная форма типового линейного непрерывного закона управления:
![]() (7.5)
(7.5)
Из (7.5) в качестве частных случаев следуют все типовые линейные законы, приведенные в табл. 1.
Мы видим, что все законы управления получаются из общей формулы (7.5). Этот факт используют при серийном производстве регуляторов: все они выпускаются как ПИД-регуляторы с возможностью получить из них все законы управления табл. 1 путем выключения ненужных настроечных параметров.
Таблица 1
Типовые линейные законы управления
№ | Наименование закона | Получение формулы из (7.5) | Закон управления |
1. | Пропорциональный, П-закон |
|
|
2. | Интегральный, И-закон |
|
|
3. | Дифференциальный, Д-закон |
|
|
4. | Пропорционально-интегральный, ПИ-закон |
|
|
5. | Пропорционально-дифференциальный, ПД-закон |
|
|
6. | Интегрально-дифференциальный, ИД-закон |
|
|
7. | Пропорционально- интегрально-дифференциальный, ПИД-закон |
|
|
6. Контрольные вопросы
Зачем вводят дифференцирующую составляющую в линейный закон управления? Каковы преимущества ПИД-закона управления? Каковы недостатки ПИД-закона управления? В каком случае следует рассматривать целесообразность использования ПИД-закона управления? Какие линейные законы управления Вы знаете? Зачем нужны более совершенные (по сравнению с линейными законами) алгоритмы управления? Почему в общепромышленных регуляторах не используются различные комбинации кратных интегралов и производных высоких порядков, предусмотренные общей формой линейного закона управления? Каким образом можно получить какой-либо линейный закон управления из обобщенной формы непрерывного ПИД-закона управления?ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 8
ТЕМА: «НЕЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ»
Время проведения практического занятия (аудиторные часы) – 4 часа, занятие должно проводиться с компьютерным сопровождением в связи с обширностью материала.
Время самостоятельной работы студента (дополнительные часы) – 4 часа.
Цель занятия: изучить типовые нелинейные законы управления (функциональные, логические, оптимизационные, параметрические), получить представления о базовых свойствах САУ с регуляторами этих видов.
Рассматриваемые вопросы:
1. Классификация нелинейных законов управления.
2. Примеры нелинейных законов управления и свойства САУ, в которых они используются.
1. Цели введения нелинейностей в закон управления
Пусть известно, что выход объекта управления y(t) порожден входным сигналом f(t). Если система линейна, то форма выходного сигнала сохранится, если сохраняется форма входного сигнала (изменится лишь масштаб). Это свойство линейных систем не всегда является желательным. Можно привести примеры из нашего собственного опыта: на небольшие возмущения мы вообще никак не реагируем, и такая реакция целесообразна и экономична. В данном примере не удастся рассчитать реакцию на малые возмущения простым изменением масштаба реакций на крупные воздействия.
Цели введения нелинейностей – сделать мир автоматических систем более многообразным и, следовательно, расширить сферу их применения.
2. Классификация нелинейных законов управления (НЗУ)
Разновидности нелинейностей, которые могут быть использованы в системах управления, неисчислимы. Но традиционно выделяют 4 группы нелинейных законов:
1) функциональные;
2) логические;
3) оптимизирующие;
4) параметрические.
3. Функциональные нелинейные законы управления
3.1. Общая форма и классификация функциональных НЗУ
Обозначим: e(t) = g(t) – y(t) – рассогласование между задающим воздействием g(t) и выходом объекта y(t); u(t) – управляющее воздействие (все обозначенные переменные – скаляры).
Форма функционального нелинейного закона управления – непосредственное обобщение формы линейного закона управления (формула (5.1) в практическом занятии № 5): аргументы те же, но их комбинации – произвольные сочетания (не обязательно суммы, как в линейном законе управления):
 (8.1)
(8.1)
Форма зависимости управляющего воздействия от аргументов в (8.1) может быть самой разнообразной, но различают два класса этой зависимости:
1. Класс 1: управляющее воздействие – простая нелинейная функция (не оператор!); как и для всякой простой (в математическом смысле) функции, управляющее воздействие может быть вычислено по текущему значению рассогласования e(t). Такой класс функциональных нелинейных законов управления называется статическими НЗУ. Для статических НЗУ
![]() . (8.2)
. (8.2)
2. Класс 2: управляющее воздействие – нелинейный оператор над значениями рассогласования; в этом случае управляющее воздействие зависит не только от текущего значения рассогласования, но и от предыстории процесса управления, согласно общей формуле (8.1). Такой класс функциональных нелинейных законов управления называется динамическими НЗУ.
3.2. Откуда возникла идея использования нелинейных функциональных законов управления?
Поясним основную идею введения нелинейности на простейшем примере. Обратимся к изученным (практическое занятие № 5) свойствам линейного пропорционального (П) регулятора. Рассмотрим, какие формы может принять график отработки ступенчатого задающего воздействия при различных значениях настроечного параметра регулятора kp (будем полагать, что возмущения отсутствуют, а для устранения статической ошибки воспроизведения задания используем корректирующий множитель, введенный в п. 4.5 практического занятия № 5). Возможные формы зависимости (их только две) показаны на рис. 8.1.
При малых значениях kp выход объекта изменяется монотонно (т. е. без изменения знака производной), перерегулирование не возникает (рис. 8.1а). Будем увеличивать kp. При некотором значении монотонность нарушится и появится перерегулирование. Выход объекта приобретет форму апериодического (знак производной изменится однократно) или колебательного процесса (знак производной изменяется многократно), как на рис. 8.1б. 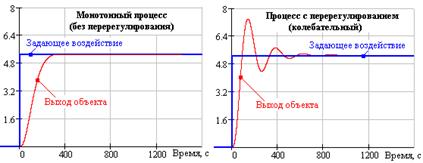
а) б)
Рис. 8.1. Две формы графика отработки ступенчатого задающего воздействия:
а) без перерегулирования, б) с перерегулированием
Зададим себе вопрос: «Какой из процессов, показанных на рис. 8.1, лучше?» Однозначно ответить нельзя: у монотонного процесса гораздо более спокойный и полезный для технологического процесса финиш, но затянутый во времени старт. У колебательного процесса, наоборот, гораздо более «резвый», полезный для технологического процесса старт, но неблагоприятный (а для некоторых технологических процессов вовсе недопустимый) финиш с перерегулированием.
Пришло время ответить на вопрос: «Зачем совершенствовать линейные законы управления?» Представим себе идеал: старт, как у процесса, показанного на рис. 8.1б, а финиш – как у монотонного, представленного на рис. 8.1а. Получим «синтетический идеал», процесс-мечту, показанный на рис. 8.2.
Ответ на вопрос зачем? получен: попытаться найти закон управления, который обеспечил бы эффективное сочетание быстрой начальной фазы процесса отработки задания со спокойным характером приближения к заданию в концевой фазе процесса.
Разберем причины, по которым график, показанный на рис. 8.2, недостижим в линейных системах (ответ на вопрос почему?). Мы уже ответили на этот вопрос выше: формы процессов в линейных системах воспроизводятся, поэтому можно получить только либо левый, либо правый вариант форм графиков, показанных на рис. 8.1, но никак не сочетание этих графиков.
Рис. 8.2. Желательный график отработки ступенчатого задающего воздействия
Теперь мы подошли к поиску ответа на вопрос как? Можно догадаться, что если бы настроечный параметр П-регулятора kp зависел от величины рассогласования e(t) и убывал бы по мере подхода к заданию, то появилась бы надежда получить график, как на рис. 8.2. Но как только мы сказали, что kp должен зависеть от e(t) – мы сразу вышли за границы линейности: такой закон управления окажется нелинейным. Для ответа на вопрос как? осталось просто придумать варианты этой зависимости.
3.3. Примеры функциональных нелинейных законов управления и их свойства
Пример 1. Статические нелинейные регуляторы. Закон управления:
 , (8.3)
, (8.3)
где kn – настроечный параметр, с помощью которого регулируется степень участия нелинейности в законе управления.
Структура закона управления такова: сомножитель kp ∙ (1 + kn∙ |e(t)|) играет роль эквивалентного коэффициента усиления П-регулятора. Значение этого коэффициента зависит от величины рассогласования e(t) между задающим воздействием g(t) и выходом объекта y(t). При больших (по абсолютной величине) рассогласованиях эквивалентный коэффициент увеличен. При подходе к заданию, когда абсолютная величина рассогласования уменьшается, эквивалентный коэффициент усиления также уменьшается. Благодаря этому для нелинейного закона управления можно выбрать коэффициент настройки kp меньшим, чем для линейного закона (таким, при котором в САУ с линейным П-регулятором не будет перерегулирования).
Аналогичные эффекты можно получить, если использовать квадрат рассогласования вместо абсолютной величины:
 . (8.4)
. (8.4)
Полезный эффект введения нелинейности иллюстрирует рис. 8.3.
Рис. 8.3. Сравнение качества управления в САУ с линейным П-регулятором и нелинейным статическим регулятором (8.4)
Мы видим, что в начальной фазе переходного процесса скорость изменения выхода в САУ с нелинейным регулятором практически такая же высокая, как в САУ с П-регулятором. По мере подхода к заданию эквивалентный коэффициент усиления нелинейного регулятора уменьшается, благодаря чему практически устраняется перерегулирование и обеспечивается плавное приближение к заданию в концевой фазе переходного процесса.
Пример 2. Динамический нелинейный регулятор. Введем нелинейности в линейный пропорционально-интегральный (ПИ) (формула (6.10)) закон управления:
 . (8.5)
. (8.5)
Цели введения нелинейностей – те же, что и в примере 1. Настроечные параметры kn1, kn2 позволяют регулировать степень участия нелинейных добавок в пропорциональной и интегральной составляющих ПИ-регулятора соответственно (в линейном ПИ-регуляторе степень участия П - и И-составляющих задается параметрами kp, ki соответственно).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
