


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
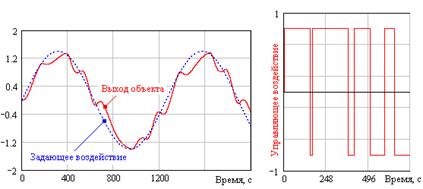
Эффект введения нелинейностей в ПИ-закон управления показан на рис. 8.4.

Рис. 8.4. Сравнение качества управления в САУ с линейным ПИ-регулятором и в САУ с
нелинейным динамическим регулятором (8.5). Система программного управления
На практическом занятии № 6 мы отмечали, что ПИ-регулятор не всегда обеспечивает нужное качество управления в системах программного управления (в частности, если задающее воздействие высокочастотное). На рис. 8.4 показан именно такой случай: линейный ПИ-регулятор отрабатывает меандровое задающее воздействие с большими перерегулированиями. За счет введения нелинейностей удается существенно улучшить качество воспроизведения задания без ущерба для быстродействия системы.
В следящих системах за счет введения нелинейностей также удается значительно улучшить качество воспроизведения задающего воздействия (рис. 8.5).
Рис. 8.5. Сравнение качества управления в САУ с линейным ПИ-регулятором и в САУ с
нелинейным динамическим регулятором (8.5). Следящая система
Другие варианты введения нелинейностей и их эффекты
Заметим, что идея введения нелинейностей предоставляет пытливым инженерам и студентам огромные возможности для изобретений (мир нелинейностей бесконечно многообразен). Приведем несколько примеров.
1. Введение дополнительной нелинейности в релейный регулятор (который, естественно, сам по себе реализует функциональный нелинейный закон управления). Рассмотрим процесс в САУ с «классическим» релейным регулятором: управляющее воздействие определяется по знаку (а не по величине) рассогласования между задающим воздействием и выходом объекта. В такой САУ неизбежны автоколебания. Закон управления имеет вид:
 , (8.6)
, (8.6)
где ko – коэффициент усиления объекта, kr – настроечный параметр релейного регулятора, z(t), y(t) – соответственно задающее воздействие и выход объекта.
Сомножитель  введен для компенсации статической ошибки воспроизведения задания (см. п. 4.5 практического занятия № 5).
введен для компенсации статической ошибки воспроизведения задания (см. п. 4.5 практического занятия № 5).
Нелинейность введена функцией sign(…):
 .
.
На рис. 8.6 показан процесс отработки переменного во времени задающего воздействия (система программного управления).
а) б)
Рис. 8.6. Процессы в САУ с релейным регулятором: а – отработка переменного во
времени задающего воздействия (kr = 0.8); б – фрагмент графика изменения управляющего
воздействия
Мы видим, что управляющее воздействие (в зависимости от знака рассогласования между заданием и выходом объекта) принимает одно из двух возможных значений. Управляющие воздействия изменяются резко, что не всегда желательно (может вызвать повышенный износ технических средств управления). Из-за резких изменений управляющих воздействий характер воспроизведения задания получается волнообразным.
Введем корректирующую нелинейность, ослабляющую значения управлений, если выход объекта близок к заданию:
 . (8.7)
. (8.7)
За счет введения нелинейности можно значительно уменьшить kr по сравнению со значением в (8.6). Ожидаемые эффекты от введения корректирующей нелинейности: во-первых, управляющие воздействия будут изменяться малыми ступеньками переменной величины, поэтому график выхода объекта станет более гладким; во-вторых, благодаря возможности уменьшить kr диапазон изменения управляющих воздействий будет меньшим, чем в САУ с регулятором (8.6). Эти эффекты подтверждают рис. 8.7 и 8.8.
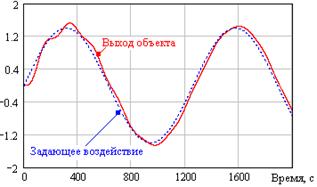
Рис. 8.7. График выхода объекта в САУ с релейным регулятором с корректирующей
нелинейностью (kr = 0.05; kn = 60)
Рис. 8.8. Фрагмент графика изменения управляющего воздействия в САУ с релейным
регулятором с корректирующей нелинейностью
2. Динамический пропорционально-дифференциальный регулятор с форсированной или с демпфированной реакцией на быстрое изменение рассогласования между заданием и выходом объекта. Закон управления имеет вид:
![]() , (8.8)
, (8.8)
где kp, kd – настроечные параметры, e(t) – рассогласование, знак (+) приводит к форсировке реакции на быстрое изменение рассогласования, а знак (–) – к ее демпфированию, подавлению.
4. Логические нелинейные законы управления
4.1. Происхождение и определение логических НЗУ
Если не удается обеспечить хорошее качество управления при использовании известных законов управления, часто прибегают к протоколированию действий опытного оператора. Получается своего рода рецептурный справочник: если ситуация такова, то делай так… (похоже на устав военной службы). Формализация таких рецептов содержит логические функции (ЕСЛИ, И, ИЛИ, НЕ, ИСКЛЮЧАЮЩЕЕ ИЛИ, …).
Определение: Группа алгоритмов, построенная с использованием логических функций, называется логическими нелинейными законами управления (в этом определении слово «нелинейными» лишнее: логические функции сами по себе нелинейны).
На базе подражания опытным диспетчерам сформировалась целая ветвь теории управления (так называемое ситуационное управление). Популярность этого направления непрерывно растет, в особенности благодаря появлению нейронных сетей, способных обучаться.
4.2. Пример САУ с логическим нелинейным законом управления. Регулятор LittleMan
Рассмотрим задачу управления уровнем воды в водохранилище (рис. 8.9).
Рис. 8.9. Схема технологического комплекса
Технологический комплекс состоит из следующих элементов:
1. Водохранилище с водозаборным узлом, расположенное в месте впадения реки – источника воды.
2. Отводящий канал, по которому вода из водохранилища подается в оросительную систему.
3. Аварийный сброс, по которому отводится вода при переполнении водохранилища выше предельной отметки.
4. Гидротехническое сооружение, с помощью поднимания / опускания затворов которого регулируется подача воды в отводящий канал и аварийный сброс.
Технологическая цель комплекса – обеспечить подачу воды в отводящий канал согласно заявке потребителей.
Необходимость системы управления объясняется тем, что график подачи воды потребителям не связан жестко с поступлением воды по реке. Различия частично погашаются запасом воды в водохранилище.
Регулятор LittleMan предназначен для поддержания уровня воды в водохранилище в заданном диапазоне. Заданы: верхняя Hmax (м) и нижняя Hmin (м) отметки уровня воды в водохранилище. Требуется управлять объектом так, чтобы текущее значение уровня воды H(t) практически всегда было между этими отметками: Hmin £ H(t) £ Hmax. Небольшие периоды выхода за эти отметки допустимы, т. к. значения Hmax и Hmin устанавливаются с запасом.
Алгоритм LittleMan следует логике очень ленивого диспетчера. Рассмотрим график изменения уровня воды в водохранилище (рис. 8.10).
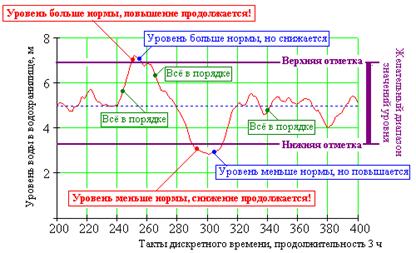
Рис. 8.10. График изменения уровня воды в водохранилище с указанием характерных
режимов
Мы видим, что благодаря довольно широкому диапазону допустимых значений уровня режим, в основном, таков, что никакого вмешательства не требуется.
Но в некоторые периоды уровень воды выходит за желательные пределы. Ленивая логика регулятора такова, что ЕСЛИ уровень выходит за допустимый предел, НО «сам по себе» стремится вернуться в допустимый диапазон, то ничего делать не нужно (ситуация сама исправится). И только в случае развития неблагоприятной ситуации нужно вмешаться.
Алгоритм таков:
Задаться дискретой времени (чаще всего 15 минут).
Для каждой дискреты t выполнять:
ЕСЛИ Hmin £ H(t) £ Hmax, то НИЧЕГО НЕ ДЕЛАТЬ.
ИНАЧЕ ЕСЛИ H(t) > Hmax И ![]() (т. е. если уровень убывает), ТО НИЧЕГО НЕ ДЕЛАТЬ.
(т. е. если уровень убывает), ТО НИЧЕГО НЕ ДЕЛАТЬ.
ИНАЧЕ ЕСЛИ H(t) < Hmin И ![]() (т. е. если уровень растет), ТО НИЧЕГО НЕ ДЕЛАТЬ.
(т. е. если уровень растет), ТО НИЧЕГО НЕ ДЕЛАТЬ.
ИНАЧЕ ЕСЛИ H(t) > Hmax И ![]() (т. е. если уровень не убывает), ТО ОТКРЫТЬ ЗАТВОР АВАРИЙНОГО СБРОСА. ПОДОЖДАТЬ 3 – 4 ТАКТА
(т. е. если уровень не убывает), ТО ОТКРЫТЬ ЗАТВОР АВАРИЙНОГО СБРОСА. ПОДОЖДАТЬ 3 – 4 ТАКТА
ИНАЧЕ ЕСЛИ H(t) < Hmin И ![]() (т. е. если уровень не возрастает), ТО ЗАКРЫТЬ ЗАТВОР ОТВОДЯЩЕГО КАНАЛА. ПОДОЖДАТЬ 3 – 4 ТАКТА
(т. е. если уровень не возрастает), ТО ЗАКРЫТЬ ЗАТВОР ОТВОДЯЩЕГО КАНАЛА. ПОДОЖДАТЬ 3 – 4 ТАКТА
КОНЕЦ ЕСЛИ
Человек, наблюдающий за работой LittleMan’а, может потратить не одни сутки, пока дождется, чтобы регулятор «проснулся» и выполнил работу. Надежность регулятора очень высока, износ почти не происходит – тем не менее уровень воды в водохранилище поддерживается хорошо.
4.3. Где используются логические регуляторы?
Область применения – плохо формализуемые задачи управления.
Один из примеров задач такого типа – управление подходом судов к причалам на разгрузку в порту с напряженным ритмом работы.
5. Оптимизирующие нелинейные законы управления
5.1. Общие замечания
В п. 2 практического занятия № 5 мы упоминали о двух подходах к созданию алгоритмов управления – изобретательскому (ему и были посвящены занятия № 5, 6, 7) и критериальному, существо которого – в получении алгоритма «на кончике пера» по следующей схеме:
1. Исходя из цели и содержательной постановки задачи управления объектом, формулируется критерий, характеризующий качество управления.
2. Записываются ограничения, которым должен удовлетворять процесс управления.
3. Формализуется модель объекта и технических элементов системы управления.
В результате получается формализованная, математическая задача: для заданной модели объекта создать алгоритм управления, доставляющий наилучшее значение критерию качества при выполнении ограничений, накладываемых на процесс управления.
Определение. Алгоритм управления, синтезированный в результате решения этой задачи, может оказаться как линейным, так и нелинейным. В последнем случае такой алгоритм относится к классу нелинейных оптимизирующих законов управления.
Отметим, что задача синтеза оптимизирующего алгоритма управления является одной из задач математической теории вариационного исчисления; в ней используется тройка понятий: {критерий, ограничения, модель объекта}. Некоторые вопросы вариационного исчисления изучаются в учебной дисциплине «Методы оптимизации», входящей в план подготовки инженеров по специальности «Автоматизированные системы обработки информации и управления».
В п. 2 практического занятия № 5 мы также отмечали, что критериальный подход к созданию алгоритмов управления применяется, в основном, в индивидуальных, ответственных проектах систем управления (в отличие от линейных П-, ПИ-, ПИД-законов управления, встраиваемых в общепромышленные регуляторы для массового использования). Это объясняется двумя причинами:
- Во-первых, тем, что постановки задач оптимизации обычно сложны, требуют тщательного учета особенностей объекта управления и не всегда могут быть решены на базе методов, известных к моменту разработки системы (требуют развития этих методов). Для развития новых методов требуется проведение научных исследований, но нет гарантии, что затраченное на них время приведет к успеху (а при проектировании сроки создания системы жестко ограничены). Поэтому приходится прибегать к «натяжкам»: выбирать критерий, модель объекта и ограничения, не точно соответствующие содержательной постановке, но подпадающие под уже разработанные методы синтеза алгоритмов.
- Во-вторых, тем, что по самому существу задачи оптимизации алгоритм управления будет «выжимать» все ресурсы управления ради того, чтобы доставить экстремум критерию. В результате может оказаться, что алгоритм будет обладать плохими показателями чувствительности: небольшие (неизбежные) неточности в модели объекта и ограничениях могут привести к большим потерям качества управления. В занятии № 5 мы отмечали, что показатели чувствительности линейных алгоритмов хорошие (см., например, п. 4.7).
Но всё же в случае успеха оптимизирующие алгоритмы позволяют получить качество управления намного превосходящее достижимое при использовании изобретенных алгоритмов.
5.2. Замечания к постановкам задач синтеза оптимизирующих алгоритмов управления
Задача синтеза состоит в разработке структуры САУ и определении параметров алгоритма управления, обеспечивающих достижение требуемых показателей качества управления. Классы внешних и внутренних возмущений, а также модель объекта остаются известными (возможно, сведения о модели предлагаются известными неточно – например, структура модели известна, а параметры неизвестны).
5.2.1. Понятие о «трубке Солодовникова». По существу практическая задача синтеза почти всегда является многокритериальной, т. к. показатели качества САУ противоречивы и требуется добиться компромисса между ними. В частности, при изучении линейных законов управления мы отмечали, что требование обеспечить минимальное время переходного процесса вступает в конфликт с требованием обеспечить отсутствие перерегулирования. Понятие «трубка Солодовникова» используется для того, чтобы алгоритм обеспечил компромисс между противоречивыми показателями качества управления. Алгоритм управления должен быть таким, чтобы все инженерные показатели качества управления не выходили за границы, оговоренные в техническом задании на разработку системы управления.
5.2.2. Общая формулировка задачи синтеза оптимизирующего алгоритма. Найти структуру системы управления и определить последовательность управляющих воздействий U(t), 0 £ t £ T (Т задано), обеспечивающих экстремум критерия качества J (в математической теории оптимизации он называется функционалом), J = J(y(t), u(t), t, 0 £ t £ T) при выполнении ограничений на переменные состояния Ymin £ y(t) £ Ymax и управляющие воздействия Umin £ u(t) £ Umax " t Î[0, T] и удовлетворяющих математической модели объекта (трактуемой как совокупность ограничений-равенств).
Постановка задачи следует общей математической логике вариационного исчисления. Конкретные конструктивные решения получены только для частных случаев функционалов, ограничений и моделей объекта.
5.2.3. Типизация критериев оптимальности САУ и сведения о разработанных методах синтеза. Наиболее значимые результаты получены для следующих критериев:
1. Быстродействие САУ (задача об оптимальном быстродействии, решается на основе принципа максимума ).
2. Суммарное среднее квадратическое отклонение воздействий от заданных значений (задача об аналитическом конструировании оптимальных регуляторов, АКОР, решается на основе метода динамического программирования Р. Беллмана).
3. Суммарное среднее квадратическое отклонение векторов состояния и управляющих воздействий от оптимальных значений, достигаемых при минимизации критерия обобщенной работы (задача решается в терминах теории устойчивости ).
4. Минимизация максимального отклонения объекта от заданного значения (задача о минимаксе, решается в терминах чебышевской задачи линейного программирования.)
5. Воспроизведение желательной формы логарифмической амплитудной частотной характеристики САУ (задача решается в терминах частотного синтеза последовательных корректирующих устройств, дополняющих структуру САУ).
6. Воспроизведение эталонного поведения системы в условиях неполной информации о параметрах модели объекта (задача решается в терминах синтеза адаптивных систем с эталонной моделью).
5.3. Пример оптимизирующего нелинейного закона управления
Рассмотрим постановку задачи синтеза алгоритма управления, обеспечивающего минимум времени переходного процесса (задача об оптимальном быстродействии).
Замечание. Полезно обратиться к опыту экстремального автомобильного спорта. Представим себе, каким образом любитель экстремальной езды управлял бы автомобилем, если бы ему нужно было проехать по очень хорошей дороге от заданного начального пункта к заданной точке остановки за минимальное время. Высококлассный водитель ведет себя так: сразу включает максимально возможную скорость, а затем в точно рассчитанный момент времени включает максимальное торможение.
Задача об оптимальном быстродействии была поставлена в 1952 г. одним из наиболее талантливых советских ученых и решена им для одного частного случая, который мы и рассмотрим. В общем виде эта задача была решена математиками: академиком и его школой. Результат был сформулирован в теореме, получившей название «Принцип максимума ».
Рассмотрим следующую задачу: пусть модель объекта класса «вход-выход» задана в форме дифференциального уравнения n-го порядка, причем соответствующее характеристическое уравнение имеет только действительные корни, среди которых нет кратных:
![]() , (8.9)
, (8.9)
где y(t), u(t) – соответственно выход объекта и управляющее воздействие (скаляры), k – коэффициент усиления объекта, a0, … , an – параметры.
Управляющие воздействия ограничены по диапазону:
![]() (8.10)
(8.10)
Требуется найти u(t), переводящее систему из заданного начального состояния в заданное конечное состояние за минимальное время.
В данной задаче имеются все три признака задачи оптимизации: модель объекта (8.9) – линейная, имеются ограничения (8.10) и задан критерий – время переходного процесса.
Эта задача была поставлена и решена . Решение сформулировано в форме теоремы об n интервалах: график управляющего воздействия состоит из переключений с одного граничного значения управления к другому; число таких переключений равно порядку дифференциального уравнения (8.9), а продолжительность каждого интервала постоянства управляющего воздействия уменьшается – от наиболее продолжительного первого интервала к наиболее кратковременному последнему интервалу. Пример графика управляющего воздействия показан на рис. 8.11.
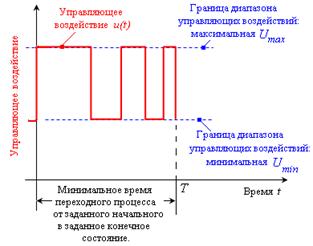
Рис. 8.11. График управляющего воздействия в системе, оптимальной по быстродействию
Мы видим, что в данном случае управление получилось релейным (т. е. нелинейным), несмотря на то, что модель объекта (8.9) линейная. Нелинейность закона управления объясняется наличием ограничений (8.10) и нелинейной зависимостью критерия (быстродействие) от переменных состояния и управляющих воздействий.
6. Параметрические нелинейные законы управления
Определение: параметрическим законом управления называется такой, в котором управляющее воздействие зависит от некоторого параметра (а не от выхода объекта!).
Так же, как и оптимизирующие, параметрические законы управления не относятся к типовым, синтезируются индивидуально, с учетом конкретных особенностей прикладной задачи.
6.1. Пример параметрического закона управления
Рассмотрим задачу стыковки космического корабля с орбитальной станцией, рис. 8.12.
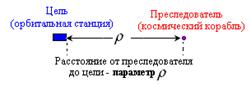
Рис. 8.12. Графическая интерпретация задачи преследования
Сформулируем естественные требования к алгоритму управления. Эти требования будут определены не в зависимости от переменных состояния объекта (преследователя), а в терминах внешнего параметра – расстояния r от преследователя до цели.
1. Требование 1: объекты должны сближаться, т. е. расстояние r(t) должно быть убывающей функцией времени; математически это означает, что производная расстояния во времени отрицательна: ![]() .
.
2. Требование 2: контакт преследователя и цели должен быть мягким, т. е. в момент причаливания скорость изменения расстояния должна быть нулевой:  .
.
3. Требование 3: сила удара в момент причаливания должна быть не больше допустимой; согласно 2-му закону Ньютона сила удара пропорциональна ускорению, поэтому данное требование ограничивает вторую производную расстояния: ![]() , где Bmax – максимально допустимая (по абсолютной величине) сила удара.
, где Bmax – максимально допустимая (по абсолютной величине) сила удара.
4. Требование 4: время T достижения контакта должно быть не больше заданного (то есть быть конечным): T £ T *.
Начальное расстояние r0 от преследователя до цели задано.
Попытаемся задать такой закон изменения параметра r, чтобы выполнить все требования. Наиболее простой способ – «заставить» управляющее воздействие изменять r согласно простейшему дифференциальному уравнению: ![]() . Решение его имеет вид:
. Решение его имеет вид:  .
.
К сожалению, требование 4 не выполняется: время достижения контакта теоретически бесконечно.
Введем в закон изменения параметра нелинейность:
![]() (8.11)
(8.11)
Если подобрать управляющее воздействие таким, чтобы расстояние между преследователем и целью изменялось по закону (8.11), то получим, решая (8.11) при разных значениях показателя степени b:
- При b ³ 1 время причаливания T®∞, не выполняется требование 4.
- При b < 0.5 сила удара недопустима: ![]() , не выполняется требование 3.
, не выполняется требование 3.
- При 0.5 £ b < 1 все требования выполняются. Этот вариант и приведет к успеху.
Концевой участок изменения расстояния от преследователя до цели показан на рис. 8.13.
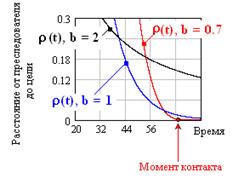
Рис. 8.13. Изменение расстояния от преследователя до цели при разных значениях b
Мы видим, что при b = 0.7 время причаливания конечно, все требования к закону изменения параметра выполняются.
7. Заключение
Еще раз повторим: мир нелинейных законов управления неисчерпаем и поэтому может оказаться хорошим полигоном как для тех, кто любит изобретать, так и для тех, кто склонен к аналитической работе.
8. Контрольные вопросы
Какова цель введения нелинейностей в закон управления? Какие типы нелинейных законов управления Вы знаете? Что такое функциональные нелинейные законы управления? Какие функциональные нелинейные законы управления называются статическими? Какие функциональные нелинейные законы управления называются динамическими? Что такое логические нелинейные законы управления? Какова область применения логических регуляторов? Что такое оптимизирующие нелинейные законы управления? Что означает понятие «трубка Солодовникова»? Что такое параметрические нелинейные законы управления?
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Методы классической и современной теории автоматического управления: В 3-х т. / Под ред. . – М.: МГТУ им. , 2000. – 748 с.
2. Бесекерский, систем автоматического управления / , . – М.: Профессия, 2004. – 752 с.
3. Ким, задач по теории автоматического управления. Линейные системы / , . – М.: ФИЗМАТЛИТ, 2007. – 168 с.
4. Советов, систем. Практикум / , . – М.: ВШ, 2005. – 295 с.
5. Афанасьев, теория конструирования систем управления / , , . – М.: ВШ, 1998. – 574 с.
6. Теория автоматического управления / Под ред. . – М.: ВШ, 2003. – 268 с.
7. Автоматизированные системы управления. Лабораторный практикум по техническим средствам / Под общ. ред. . – М.: ВШ, 1986. – 279 с.
8. Проектирование систем автоматического контроля, регулирования и управления технологическими объектами в металлургии / [и др.] – Волгоград: РПК «Политехник», 2006. – 136 с.
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ …...………………………………………………… | 3 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 1. ТЕМА: «ЭТАПЫ РАБОТ ПРИ СОЗДАНИИ САУ»……………………………………………. | 9 |
1. Основные работы, выполнение которых необходимо для создания эффективной САУ …………………………………... | 9 |
2. Пример: система управления нагревательной установкой …. | 10 |
3. Необходимые теоретические сведения …..………………….. | 12 |
4. Контрольные вопросы ………………………………………… | 24 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 2. ТЕМА: «СГЛАЖИВАНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ЗАВИСИМОСТЕЙ. ОЦЕНКА ПАРАМЕТРОВ МОДЕЛИ ОБЪЕКТА»…………………………... | 25 |
1. Цель обработки экспериментальных данных ……………….. | 25 |
2. Метод скользящего среднего …………………………………. | 26 |
3. Метод четвертых разностей …...……………………………… | 30 |
4. Сравнение методов скользящего среднего и четвертых разностей ……………………….…………………………………... | 33 |
5. Оценка параметров модели объекта по сглаженной кривой разгона …………………………………………………………... | 33 |
6. Контрольные вопросы ………………………………………… | 36 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 3. ТЕМА: «ПОСТРОЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ. ПОНЯТИЕ ОБ УПРАВЛЕНИИ С ОБРАТНОЙ СВЯЗЬЮ» …………………………………………... | 37 |
1. Определение передаточной функции САУ.............................. | 37 |
2. Пример построения передаточной функции САУ по ее дифференциальному уравнению ……………..………………. | 38 |
3. Пример построения дифференциального уравнения САУ по ее передаточной функции…………………………………... | 39 |
4. Качественные особенности замкнутой САУ с обратной связью. Существо управления с обратной связью..…..……... | 41 |
5. Контрольные вопросы ………………………………………… | 46 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 4. ТЕМА: «СТРУКТУРНЫЕ ПРЕОБРАЗОВАНИЯ САУ С ПЕРЕКРЕСТНЫМИ СВЯЗЯМИ» … | 47 |
1. Технология структурных преобразований САУ с перекрестными связями ……………..……………………… | 47 |
2. Пример получения общей передаточной функции многоконтурной САУ с перекрестными связями …..………. | 48 |
3. О пользе передаточных функций для исследования САУ …. | 54 |
4. Контрольные вопросы ………………………………………… | 55 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 5. ТЕМА: «КЛАССИФИКАЦИЯ ЗАКОНОВ УПРАВЛЕНИЯ. ЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ. ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР»…....…. | 56 |
1. Классификация законов управления …………………………. | 56 |
2. Линейные законы управления ……….……………………….. | 57 |
3. Кривая разгона П-регулятора ………………………………… | 59 |
4. Исследование свойств системы управления с П-регулятором. | 60 |
5. Сводка свойств системы управления с П-регулятором …….. | 74 |
6. Контрольные вопросы ………………………………………… | 74 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6. ТЕМА: «ЛИНЕЙНЫЕ ЗАКО-НЫ УПРАВЛЕНИЯ. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР» …………………………………..…………………... | 75 |
1. Свойства И-регулятора ……………………………………….. | 75 |
2. Зачем усложнять структуру И-регулятора? Идея ПИ-регуля-тора………………………….......………………………………. | 79 |
3. Структурная схема ПИ-регулятора, его кривая разгона, закон управления и передаточная функция ………………….. | 80 |
4. Исследование свойств САУ с ПИ-регулятором …………….. | 82 |
5. Сводка свойств системы управления с ПИ-регулятором …... | 95 |
6. Нужны ли дальнейшие усложнения закона управления? …... | 96 |
7. Как усовершенствовать ПИ-закон управления? …………….. | 102 |
8. Контрольные вопросы ………………………………………… | 103 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 7. ТЕМА: «ЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР» ……………………..….. | 104 |
1. Структурная схема ПИД-регулятора, его кривая разгона, закон управления и передаточная функция ………………….. | 104 |
2. Свойства САУ с ПИД-регулятором ………………………….. | 107 |
3. Сводка свойств системы управления с ПИД-регулятором … | 113 |
4. Нужны ли дальнейшие усложнения закона управления? …... | 114 |
5. Сводка изученных линейных законов управления …………. | 114 |
6. Контрольные вопросы ………………………………………… | 115 |
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 8. ТЕМА: «НЕЛИНЕЙНЫЕ ЗА-КОНЫ УПРАВЛЕНИЯ»………….…………………. ……………… | 116 |
1. Цели введения нелинейностей в закон управления ………… | 116 |
2. Классификация нелинейных законов управления (НЗУ) …... | 116 |
3. Функциональные нелинейные законы управления …………. | 116 |
4. Логические нелинейные законы управления ………………... | 124 |
5. Оптимизирующие нелинейные законы управления ………... | 127 |
6. Параметрические нелинейные законы управления …………. | 131 |
7. Заключение …………………………………………………….. | 133 |
8. Контрольные вопросы ………………………………………… | 133 |
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ ………………… | 133 |
Елена Георгиевна Крушель,
Наталия Александровна Панфилова
МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ К ПРАКТИЧЕСКИМ ЗАНЯТИЯМ
ПО ДИСЦИПЛИНЕ «ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ»
Учебное пособие
Редактор
Компьютерная верстка
Темплан 2010 г., поз. № 16К.
Подписано в печать г. Формат 60×84 1/16.
Бумага листовая. Печать офсетная.
Усл. печ. л. 8,5. Усл. авт. л. 8,31.
Тираж 100 экз. Заказ №
Волгоградский государственный технический университет
г. Волгоград, пр. Ленина, 28, корп. 1.
Отпечатано в КТИ
, каб. 4.5
 |

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
