


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
т. е.
 . (5.20)
. (5.20)
Значение коэффициента h(kp, Δko) зависит от настроечного параметра kp регулятора (через формулу для a) и от относительной погрешности оценки коэффициента усиления Δko/ko.
3. Вывод о том, меньше или больше чувствительность САУ с П-регулятором к погрешностям оценки коэффициента усиления объекта по сравнению с чувствительностью разомкнутой системы, зависит от того, является ли коэффициент h(kp, Δko) меньше или больше единицы (см. (5.20)). Если окажется, что h(kp, Δko) меньше единицы, то вывод будет в пользу САУ с П-регулятором: относительная ошибка при одной и той же величине погрешности определения коэффициента усиления объекта в САУ с П-регулятором будет меньше, чем в разомкнутой системе.
Проанализируем соотношение между h(kp, Δko) и единицей. Предположим, что знаки расчетных значений коэффициента усиления объекта и настроечного параметра регулятора совпадают (как и требуется для того, чтобы система управления гарантированно была устойчива). Не ограничивая общности, будем полагать, что оба коэффициента положительны, ko > 0, kp > 0, поэтому a = 1 + ko ∙ kp > 0. Могут иметь место следующие варианты:
Ситуация 1. Пусть фактическое значение коэффициента усиления объекта не меньше расчетного, т. е. пусть Δko ³ 0.
Тогда ![]() .
.
Поэтому знаменатель в (5.19) окажется больше единицы:
 , а коэффициент h(kp, Δko) (согласно 5.19) – меньше единицы.
, а коэффициент h(kp, Δko) (согласно 5.19) – меньше единицы.
Таким образом, если фактическое значение коэффициента усиления объекта не меньше расчетного, то вывод – в пользу САУ с П-регуля-тором: в системе с обратной связью меньше чувствуются погрешности определения коэффициента усиления объекта.
Ситуация 2. Пусть фактическое значение коэффициента усиления объекта меньше расчетного, но фактическое значение коэффициента усиления (как и расчетное) положительно (трудно вообразить себе ситуацию, когда разработчик системы управления будет настолько неграмотен, что ошибется в знаке коэффициента усиления), т. е. пусть -1 < Δko/ko £ 0. Тогда знаменатель в (5.19) рассчитаем так:
![]() .
.
Поскольку мы полагали, что ![]() , то и в этом случае получилось, что знаменабольше единицы:
, то и в этом случае получилось, что знаменабольше единицы:  , а коэффициент h(kp, Δko) (согласно 5.19) меньше единицы.
, а коэффициент h(kp, Δko) (согласно 5.19) меньше единицы.
Таким образом, и в том случае, когда фактическое значение коэффициента усиления объекта меньше расчетного, но погрешность его определения менее 100 %, то вывод также в пользу САУ с П-регулятором: в системе с обратной связью меньше чувствуются погрешности определения коэффициента усиления объекта.
Примечание. Ситуация, при которой погрешность определения коэффициента усиления настолько велика, что знаки расчетного и фактического значений не совпадают, требует особого анализа (хотя на практике такая ситуация почти не встречается). В частности, если Δko < 0 и  , знаменаобращается в нуль и относительная погрешность воспроизведения выхода объекта стремится к бесконечности. Это пример границы устойчивости 3-го вида. При других значениях |Δko| /ko в диапазоне Δko/ko < -1 (т. е. при погрешности в определении коэффициента усиления объекта более 100 %) чувствительность САУ с П-регулятором проигрывает чувствительности разомкнутой САУ.
, знаменаобращается в нуль и относительная погрешность воспроизведения выхода объекта стремится к бесконечности. Это пример границы устойчивости 3-го вида. При других значениях |Δko| /ko в диапазоне Δko/ko < -1 (т. е. при погрешности в определении коэффициента усиления объекта более 100 %) чувствительность САУ с П-регулятором проигрывает чувствительности разомкнутой САУ.
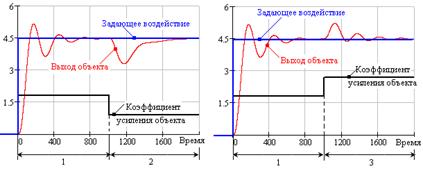
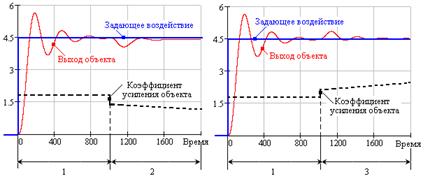
На рис. 5.11 показаны зависимости относительной погрешности воспроизведения задающего воздействия от относительной погрешности определения коэффициента усиления объекта. Мы видим следующее:
1. При одной и той же погрешности определения ko погрешность воспроизведения задающего воздействия в САУ с П-регулятором меньше, чем в разомкнутой САУ.
2. Различия в пользу САУ с П-регулятором тем больше, чем больше величина настроечного параметра kp.
3. В практическом диапазоне погрешностей определения коэффициента усиления объекта (± 20 %) относительная погрешность воспроизведения задания укладывается в узкий диапазон (± 5 %) при рабочих значениях настроечного параметра kp.
4. Для практики лучше занизить предположение о величине коэффициента усиления объекта, см. графики в первом квадранте рис. 5.11.
Замечание. Возможно, следует пояснить, почему же (по какой физической причине) обратная связь в САУ с П-регулятором не может устранить статическую ошибку. Ведь обратная связь предназначена именно для того, чтобы ее устранить. Пояснение – по рис. 5.12.
С одной стороны, статическое значение ystatic выхода объекта связано со статическим значением рассогласования estatic = g – ystatic соотношением ystatic = g – estatic. В координатах «рассогласование–выход» эта зависимость имеет форму обратной линейной, пересекающей координатную плоскость под углом 45°. С другой стороны, рассогласование является входом участка последовательного соединения регулятора и объекта, см. рис. 5.3. Поэтому статическое значение выхода определяется еще одним соотношением ystatic = ko ∙ kp ∙ estatic. Если задать значения ko, kp, то эта зависимость имеет форму прямой линейной, исходящей из начала координат. При разных значениях настроечного параметра регулятора kp угол наклона этой прямой к оси абсцисс будет тем больше, чем больше kp.
Точка равновесия определяется пересечением прямых ystatic = g – estatic и ystatic = ko∙kp∙estatic. Мы видим, что при заданных значениях ko, kp статическая ошибка неизбежна, и она тем меньше, чем больше настроечный параметр П-регулятора kp.
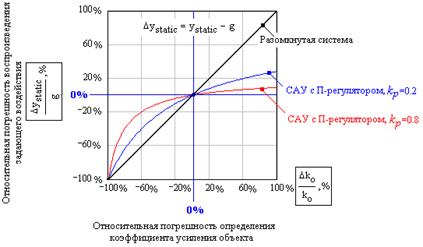
Рис. 5.11. Неточности в определении коэффициента усиления объекта МЕНЬШЕ
сказываются на точности воспроизведения задающего воздействия в САУ с
П-регулятором (по сравнению с разомкнутой системой)
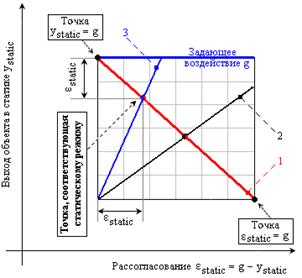
1 – прямая ystatic(estatic) = g – estatic; 2 – прямая ystatic(estatic) = ko · kp · estatic при kp = 0.8;
3 – прямая ystatic(estatic) = ko · kp · estatic при kp = 2.5.
Рис. 5.12. Пояснения к причине наличия статической ошибки в САУ с П-регулятором
5. Сводка свойств системы управления с П-регулятором
Исследования, описанные в п. 4, позволяют сделать следующие выводы.
САУ с П-регулятором свойственны:
1. Принципиальное наличие статической ошибки: ![]() .
.
2. Возможность устранения статической ошибки по каналу «задающее воздействие – выход объекта», невозможность устранения статической ошибки по каналу «возмущающее воздействие – выход объекта».
3. Понижение чувствительности САУ к неточностям сведений о коэффициенте усиления объекта (по сравнению с разомкнутой системой).
Кроме того, имеют место следующие свойства (очевидные, не нуждающиеся в пояснениях):
1. Простота структуры (П-регулятор имеет простейшую передаточную функцию).
2. Простота настройки параметра (имеет единственный настраиваемый параметр kp).
3. Высокое быстродействие реакции на появление рассогласования (П-регулятор – безынерционное звено).
4. Простота обеспечения требований к устойчивости (П-регулятор как безынерционное звено не увеличивает порядок знаменателя передаточной функции САУ).
6. Контрольные вопросы
1. Как классифицируются законы управления?
2. Какой закон управления называется линейным?
3. Какой закон управления называется непрерывным?
4. Какой закон управления называется цифровым?
5. Какие законы управления называются типовыми?
6. Какие законы управления называются специальными?
7. Может ли быть устранена статическая ошибка воспроизведения постоянного задающего воздействия в САУ с П-регулятором? Если да, то каким образом?
8. Может ли быть устранена статическая ошибка, возникающая из-за действия возмущений в САУ с П-регулятором? Если да, то каким образом?
9. Каковы преимущества пропорционального закона управления?
10. Каковы недостатки пропорционального закона управления?
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6
ТЕМА: «ЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ.
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР»
Время проведения практического занятия (аудиторные часы) – 2 часа, занятие должно проводиться с компьютерным сопровождением в связи с обширностью материала.
Время самостоятельной работы студента (дополнительные часы) – 2 часа.
Цель занятия: изучить типовые линейные законы управления – интегральный (И) и пропорционально-интегральный (ПИ), получить представление о базовых свойствах САУ с регуляторами этих видов.
Рассматриваемые вопросы:
1. Интегральная составляющая в законе управления.
2. Типовой интегральный закон управления и его свойства.
3. Типовой пропорционально-интегральный закон управления и его свойства.
1. Свойства И-регулятора
1.1. Зачем вводить интегральную составляющую в закон управления?
Следуя «закону логики инженера» (зачем? ® почему? ® как?), ответим сначала на вопрос: «Зачем искать закон управления, если есть экономичный простейший пропорциональный П-регулятор?». Ответ очевиден: в САУ с П-регулятором имеется неустранимая статическая ошибка при отработке неконтролируемых возмущающих воздействий.
Почему возникает эта ошибка, поясняют формула (5.8) и п. 4.7 из практического занятия № 5.
В рамках структуры с П-регулятором статическую ошибку устранить нельзя, поэтому ответ на вопрос: «Как ее устранить?» нужно искать в направлении изменения структуры регулятора. Нужно найти такое звено управляющей системы, которое могло бы «запомнить» и сохранить на выходе регулятора значение управляющего воздействия, при котором рассогласование между задающим воздействием и выходом объекта равно нулю.
Простейший способ попытаться найти ответ на вопрос как? – провести перебор по известным элементам структуры САУ.
Рассмотрим (в качестве претендентов на обладание таким свойством) элементарные звенья. Ответ на вопрос: «Почему именно элементарные?» – в максиме «лезвие Оккама»: решение нужно искать начиная с простейших вариантов и усложнять варианты только в том случае, когда перебор простейших вариантов не приведет к успеху.
1.2. Можно ли устранить статическую ошибку регулятором, в качестве которого используется элементарное звено из группы звеньев с самовыравниванием?
Начнем с простейшей, первой группы элементарных звеньев – звеньев с самовыравниванием (рассмотрены в лекционном курсе). Общая форма передаточной функции этих звеньев:
 ,
,
где kзв_самовыравн, Qсамовыравн(p) – соответственно коэффициент усиления звена и полином оператора Лапласа соответствующей размерности. Если использовать звенья этой группы в качестве регулятора, то передаточная функция замкнутой САУ объектом, передаточная функция которого представлена формулой (5.3), получится такой (для канала «задающее воздействие – выход»):
 (6.1)
(6.1)
Статическое значение выхода объекта ystatic (при t ® ∞), соответствующее подаче на вход объекта постоянного задающего воздействия g, определяется по передаточной функции при p = 0:
 . (6.2)
. (6.2)
Формула (6.2) с точностью до обозначений совпадает с формулой (5.8), полученной для П-регулятора (для случая, когда возмущение отсутствует).
Следовательно, группа звеньев с самовыравниванием (как и входящее в эту группу безынерционное звено – П-регулятор) не может устранить статическую ошибку при отработке неконтролируемых возмущающих воздействий.
1.3. Можно ли устранить статическую ошибку регулятором, в качестве которого используется интегрирующее элементарное звено?
Перейдем к следующей группе элементарных звеньев (интегрирующих) и начнем, следуя «бритве Оккама», с простейшего – идеального интегрирующего звена, передаточная функция которого равна
 . (6.3)
. (6.3)
Передаточная функция замкнутой САУ, в которой интегрирующее звено выполняет роль регулятора (по структурной схеме, аналогичной рис. 5.3, где П-регулятор заменен интегральным, И-регулятором с передаточной функцией по (6.3)), равна:
1. По каналу «задающее воздействие g(t) – выход объекта y(t)»:
 . (6.4)
. (6.4)
2. По каналу «возмущающее воздействие f(t) – выход объекта y(t)»:
 . (6.5)
. (6.5)
Статическое значение выхода объекта (достигается при t ® ∞), если на вход подается постоянное воздействие g(t) = g = const и f(t) = f = const, соответствует значению оператора Лапласа, равному нулю. Получим:
1. Если возмущающее воздействие равно нулю:
![]() . (6.6)
. (6.6)
2. Если задание равно нулю, но на САУ действует возмущение:
 . (6.7)
. (6.7)
Формулы (6.6) и (6.7) показывают, что использование И-регулятора в САУ достигает цели: статическая ошибка в такой САУ отсутствует.
Задающее воздействие в статике в САУ с И-регулятором воспроизводится точно, а постоянные возмущения подавляются до нуля. Статическая ошибка в САУ с И-регулятором отсутствует.
1.4. Свойства интегрального звена и кривая разгона И-регулятора
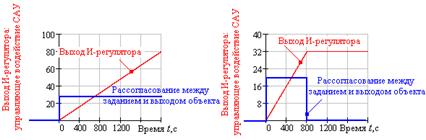
На рис. 6.1 показаны графики отработки ступенчатого задающего воздействия (рис. 6.1а) и ступенчатого возмущающего воздействия (рис. 6.1б), иллюстрирующие перечисленные свойства И-регулятора.
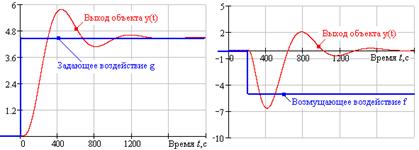
а) в САУ с И-регулятором задающее воздействие в статике воспроизводится точно | б) в САУ с И-регулятором возмущающее воздействие в статике подавляется до нуля |
Рис. 6.1. Иллюстрация свойств интегрального закона управления
Эффект отсутствия статической ошибки объясняется природой интегрирующего звена: если на «вход» интеграла подать постоянное число e, то выход u(t) будет непрерывно изменяться по линейному (во времени) закону:  . Если в некоторый момент времени t* > t скачком изменить «вход» до нуля, то интеграл «запомнит» значение, достигнутое в момент t* (не произойдет сброс значения интеграла до нуля):
. Если в некоторый момент времени t* > t скачком изменить «вход» до нуля, то интеграл «запомнит» значение, достигнутое в момент t* (не произойдет сброс значения интеграла до нуля):
![]()
Получим эффект, нужный для САУ, не имеющей статической ошибки: хотя на входе регулятора – нуль, на выходе поддерживается управляющий сигнал, отличающийся от нуля – именно такой, при котором статическая ошибка отсутствует.
Кривая разгона И-регулятора и его реакция на входной сигнал (рассогласование e(t) между задающим воздействием и выходом объекта в форме прямоугольного продолжительного импульса) показаны на рис. 6.2.
а) вход И-регулятора: рассогласование e = const | б) вход И-регулятора: рассогласование e(t) – прямоугольный импульс |
Рис. 6.2. Кривая разгона И-регулятора и иллюстрация к его свойству запоминать значение выхода после снятия входного сигнала
Примечание. Не нужно думать, что на практике интегрирующие звенья встречаются редко. Каждый видел счетчик расхода электроэнергии и регистратор километража, пройденного автомобилем: такие устройства не сбрасывают сигнал после остановки. В дискретном времени хорошим аналогом интегратора является домашняя копилка: количество денег в ней не изменяется до момента вбрасывания новой монетки, и копилка «запоминает» накопленную сумму.
2. Зачем усложнять структуру И-регулятора? Идея ПИ-регулятора
Цель устранения статической ошибки достигнута путем перехода от пропорционального к интегральному закону управления. Спрашивается – зачем искать пути дальнейшего усложнения структуры регулятора?
Ответ: можно догадаться, что платой за достижение полезного эффекта является резкое снижение скорости реакции САУ на появление рассогласования между заданием и выходом объекта.
Почему это происходит? Причина – в природе процесса интегрирования; вблизи момента появления рассогласования изменения выхода интегрирующего звена очень малы:

Должен пройти заметный промежуток времени, пока САУ с И-регуля-тором «почувствует», что выход отклонился от задания.
Как устранить нежелательный эффект потери скорости реакции и одновременно не потерять полезный эффект устранения статической ошибки? Вспомним, что в САУ с П-регулятором скорость реакции на появление рассогласования была высокой (управляющее воздействие, пропорциональное рассогласованию, появляется на входе объекта безынерционно).
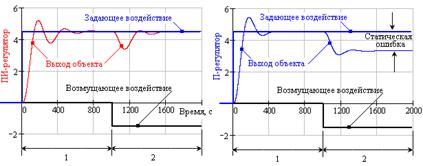
На рис. 6.3 приведены результаты сравнения переходных процессов в системах с И-регулятором и с П-регулятором. Иллюстрируются их «инверсные» свойства: высокое быстродействие П-регулятора, сопровождаемое статической ошибкой, и отсутствие статической ошибки в САУ с И-регулятором, сопровождаемое низким быстродействием.
Сравнение САУ с П - и И-регуляторами подводит нас к ответу на вопрос как?: нужно включить параллельно оба регулятора. Тогда в начальной части процесса П-составляющая обеспечит быструю реакцию на появление рассогласования, а в концевой части процесса И-составляющая «дотащит» выход объекта до задания. Результаты такого сотрудничества регуляторов показаны на рис. 6.4. Мы видим, что полезные эффекты сохранились, а нежелательные взаимно уничтожились.
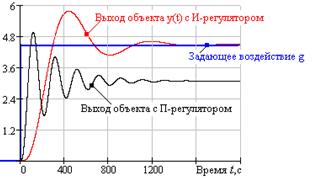
Рис. 6.3. Сравнение качеств управления САУ с И-регулятором и П-регулятором.
П-регулятор: (-) наличие статической ошибки; (+) высокое быстродействие;
И-регулятор: (+) отсутствие статической ошибки; (-) низкое быстродействие.
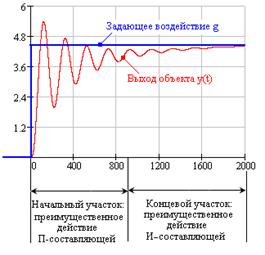
Рис. 6.4. Параллельная работа П - и И-регуляторов
Таким образом, мы «изобрели» один из самых совершенных законов управления, имеющий наивысший рейтинг применения на практике – пропорционально-интегральный закон управления, реализуемый в ПИ-регуляторе.
3. Структурная схема ПИ-регулятора, его кривая разгона, закон управления и передаточная функция
В структуру ПИ-регулятора входят следующие элементы (рис. 6.5):
1. Безынерционное звено для ввода составляющей в закон управления, пропорциональной рассогласованию e(t) = g(t) – y(t) между задающим воздействием g(t) и выходом объекта y(t).
2. Идеальное интегрирующее звено для ввода составляющей в закон управления, пропорциональной интегралу от рассогласования.
3. Узел (развилка), размножающий сигнал рассогласования на два канала (канал П-составляющей и канал И-составляющей).
4. Сумматор, осуществляющий формирование управляющего воздействия (как сумму выходов каналов П - и И-составляющих).
Рис. 6.5. Структура ПИ-регулятора
Глядя на рис. 6.5, можно догадаться, что кривая разгона ПИ-регулятора (рис. 6.6) может быть построена как сумма двух кривых разгона: для П-составляющей (рис. 5.4) и для И-составляющей (рис. 6.2а).
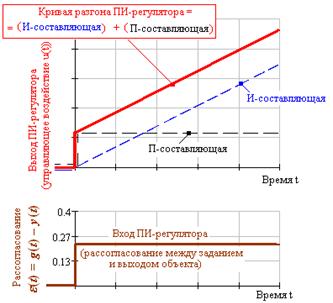
Рис. 6.6. Кривая разгона ПИ-регулятора (реакция на входное воздействие – ступенчатое рассогласование e(t) = g(t) – y(t) между задающим воздействием g(t) и выходом объекта y(t))
Закон управления, реализуемый ПИ-регулятором, получается как частный случай из общей формы линейных законов управления (5.1) (все составляющие, кроме первых двух, отсутствуют):
![]() , (6.8)
, (6.8)
где kp, ki – настроечные параметры ПИ-регулятора, отражающие вклады П - и И-составляющих в управляющее воздействие, подаваемое на объект. Параметры kp, ki являются размерными величинами:
 (6.9)
(6.9)

Обычно используют дифференциальную форму ПИ-закона (получается из (6.8) дифференцированием):
![]() . (6.10)
. (6.10)
Передаточная функция ПИ-регулятора – это отношение изображения U(p) его выхода – управляющего воздействия u(t) – к изображению E (p) его входа – рассогласования e(t). Применяя преобразование Лапласа к (6.9), получим:
![]() .
.
Отсюда найдем передаточную функцию:
![]() . (6.11)
. (6.11)
Можно было бы получить формулу для передаточной функции, используя теорему 2 алгебры структурных преобразований (о передаточной функции звеньев, соединенных параллельно): WПИ(p) есть сумма передаточных функций безынерционного звена (П-составляющая) и идеального интегрирующего звена (И-составляющая).
4. Исследование свойств САУ с ПИ-регулятором
Направления исследования – те же, как и выбранные нами при изучении П-закона:
1. Анализ качества отработки задающих воздействий и подавления возмущений. Мы ожидаем, что эти процессы будут проходить почти так же быстро, как и в системе с П-регулятором, и при этом исчезнет статическая ошибка, как и в системе с И-регулятором.
2. Анализ чувствительности САУ с ПИ-регулятором. Мы ожидаем, что в системе будут подавляться дрейф и колебания параметров объекта (благодаря наличию обратной связи).
3. Анализ использования ПИ-закона в системе программного управления. Мы ожидаем, что качество управления будет сильно зависеть от динамичности изменений задания: при быстрых изменениях задающих воздействий управляющий сигнал, скорее всего, не будет успевать их отработать.
4. Анализ возможностей использования ПИ-закона в следящей системе (т. е. в такой, задающее воздействие в которой является недетерминированным, до начала управления неизвестным и значения которого формируются в реальном времени в темпе с работой САУ). Мы ожидаем, что качество управления будет сильно зависеть от степени предсказуемости задающего воздействия: если будущие значения заданий окажутся сильно коррелированными с текущим значением, то качество управления, скорее всего, окажется приемлемым. При мало предсказуемых изменениях задания система с ПИ-регулятором, скорее всего, не будет успевать отследить эти изменения.
Замечание. Процесс моделирования полезно предварить формированием гипотез об ожидаемых результатах. Прием «предчувствия» результата исследования, проводимого методами моделирования, для инженера очень продуктивен, поскольку формирует в нем критическое отношение к результатам моделирования, позволяющее ответить на вопрос: является ли результат моделирования артефактом или же он отражает реальные свойства системы.
4.1. Качество отработки ступенчатых заданий и постоянных возмущений в САУ с ПИ-регулятором
Качество отработки ступенчатых заданий и постоянных (во времени) возмущений в САУ с ПИ-регулятором иллюстрируется рис. 6.7. На нем представлены результаты отработки ступенчатого задания и подавления постоянного возмущающего воздействия в сравнении с качеством управления в САУ с П-регулятором, в структуру которого введено корректирующее звено. Мы видим, что наши ожидания оправдались: при практически одинаковом характере динамических процессов в САУ с ПИ-регулятором постоянное возмущение подавляется до нулевой статической ошибки (в САУ с П-регулятором, как мы знаем, статическая ошибка подавления возмущений неустранима).
На рис. 6.8 при тех же данных о задающем воздействии и о возмущении, что и для рис. 6.7, приведены результаты сравнения качества управления в системах с ПИ - и И-регуляторами. Мы видим, что если отключить П-составляющую, но оставить то же значение И-составляющей, которое было использовано в САУ с ПИ-регулятором, качество управления станет неудовлетворительным (рис. 6.8а: эффект сильной колебательности и недопустимого перерегулирования). Причина – ухудшение запаса устойчивости. Если же снизить настроечный параметр ki И-регулятора так, чтобы в САУ с этим регулятором получалось такое же перерегулирование, как и в САУ с ПИ-регулятором, то качество управления в САУ с И-регулятором тоже будет плохим – на этот раз из-за потери быстродействия (рис. 6.8б, пунктир).
а) б)
1 – участки отработки задающего воздействия (возмущений нет); 2 – участки подавления возмущающего воздействия.
Рис. 6.7. Качество отработки задающего воздействия и подавления возмущений в САУ с ПИ-регулятором (рис. а). Иллюстрируется отсутствие статической ошибки. Для сравнения (рис. б) показано качество отработки задания (с коррекцией) и подавления возмущения в САУ с П-регулятором. Иллюстрируется полезный эффект ПИ-регулятора: при том же
качестве динамики в САУ с ПИ-регулятором подавляется постоянное возмущающее
воздействие
Таким образом, ПИ-регулятор выигрывает как по сравнению с П-регулятором (устраняет статическую ошибку при подавлении постоянных возмущений), так и по сравнению с И-регулятором (при одном и том же значении перерегулирования существенно повышает быстродействие отработки задающих воздействий и подавления возмущений). Платой за эти полезные эффекты является некоторое усложнение процесса настройки параметров регулятора (приходится настраивать два параметра, а в регуляторах-конкурентах – только один).
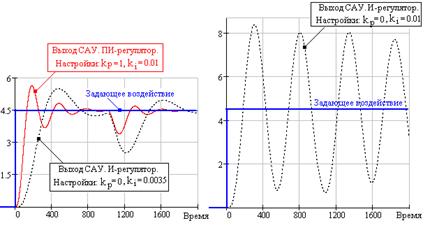
а) иллюстрируется необходимость снижения настроечного параметра И-регулятора для достижения такого же перерегулирования, как и в САУ с ПИ-регулятором (быстродействие САУ с ПИ-регулятором существенно выше) | б) динамика САУ с И-регулятором при том же настроечном параметре, что и при И-составляющей в ПИ-регуляторе (качество динамики неудовлетворительное) |
Рис. 6.8. Сравнение качества отработки задающего воздействия и подавления ступенчатого возмущения в САУ с ПИ-регулятором и в САУ с И-регулятором
4.2. Анализ чувствительности САУ с ПИ-регулятором к изменению коэффициента усиления объекта
Результаты анализа чувствительности САУ с ПИ-регулятором к изменению коэффициента усиления объекта представлены на рис. 6.9 (скачкообразное изменение коэффициента) и 6.10 (скачкообразное изменение, затем линейный дрейф). На рис. 6.11 – 6.13 чувствительность ПИ-регулятора сравнивается с чувствительностью конкурентов (П - и И-регуляторов). Настроечные параметры регулятора в ходе вычислительного эксперимента не изменялись.
Мы видим (рис. 6.9, 6.10), что за счет интегральной составляющей ПИ-регулятор подавляет довольно существенное параметрическое возмущение (скачкообразное уменьшение коэффициента усиления на 50 % (рис. 6.9а и 6.10а) и скачкообразное увеличение коэффициента усиления на 30 % (рис. 6.9б и 6.10б)).
а) б)
1 – участки отработки задающего воздействия при постоянном коэффициенте усиления объекта; 2 – участок отработки ступенчатого параметрического возмущения (скачкообразное уменьшение коэффициента усиления объекта); 3 – участок отработки ступенчатого параметрического возмущения (скачкообразное увеличение коэффициента усиления объекта).
Рис. 6.9. Качество управления в САУ с ПИ-регулятором: отработка ступенчатого задающего воздействия и подавление ступенчатого параметрического возмущающего воздействия
а) б)
1 – участки отработки задающего воздействия при постоянном коэффициенте усиления объекта; 2 – участок отработки ступенчатого параметрического возмущения (скачкообразное уменьшение коэффициента усиления объекта и линейный дрейф на уменьшение); 3 – участок отработки ступенчатого параметрического возмущения (скачкообразное увеличение коэффициента усиления объекта и линейный дрейф на увеличение).
Рис. 6.10. Качество управления в САУ с ПИ-регулятором: отработка ступенчатого
задающего воздействия и подавление ступенчатого параметрического возмущающего
воздействия с последующим линейным дрейфом
Разберем, имеется ли ограничение на диапазон параметрических возмущений. Мы уже знаем, что увеличение настроечного параметра П-регулятора kp приводит к улучшению точности воспроизведения задания в статике, но может резко ухудшить динамику вплоть до неустойчивости (см. рис. 5.5б). Но тот же эффект может получиться, если настроечный параметр kp останется прежним, а увеличится коэффициент усиления объекта (в формулу для передаточной функции САУ (5.4) эти коэффициенты входят в виде произведения, т. е. в форме общего коэффициента усиления САУ kобщ = ko∙kp). Поэтому изменение ko в сторону увеличения тоже может существенно ухудшить динамику вплоть до неустойчивости, а изменение в сторону уменьшения – снизить быстродействие системы. Поэтому параметрические возмущения, неизбежно возникающие при эксплуатации САУ, гораздо опаснее внешних: последние не могут вызвать явлений неустойчивости.
На рис. 6.11, 6.12 приведены результаты сравнения чувствительности ПИ - и П-регуляторов. Мы видим (рис. 6.11б), что при использовании П-регулятора с настроечным параметром kp, таким же, как коэффициент при П-составляющей в ПИ-регуляторе, в САУ с П-регулятором линейный дрейф коэффициента усиления объекта не подавляется: рассогласование между задающим воздействием и выходом САУ увеличивается с течением времени. Это объясняется тем, что параметр корректирующего звена, введенный в САУ с П-регулятором, теряет свои корректирующие свойства (из-за отклонения коэффициента усиления объекта ko от расчетного значения, принятого для определения параметров корректирующего звена). Попытка уменьшить влияние дрейфа коэффициента усиления объекта приводит к резкому ухудшению динамики (рис. 6.12). В то же время в САУ с ПИ-регулятором имеет место эффект хорошего подавления дрейфа коэффициента усиления объекта за счет интегральной добавки (рис. 6.11а): в САУ имеется лишь небольшая постоянная во времени статическая ошибка.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
