

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- для прибора с диапазоном индикации ±10 м/с – 4 ± 2 с;
- для прибора с диапазоном индикации ±30 м/с – 3 ± 1 с;
- для прибора с диапазоном индикации ±75 м/с – 2 ± 1 с.
Для гражданских транспортных самолетов выпускаются вариометры с диапазонами индикации до ± 75 м/с. К ним относятся серийные приборы ВР-10М, ВАР-30М, ВАР-75М.
Для маневренных самолетов выпускаются серийно вариометры с диапазоном индикации до ± 500 м/с. К ним относятся приборы ВАР-150М, ВАР‑300, ВАР-500 и другие.

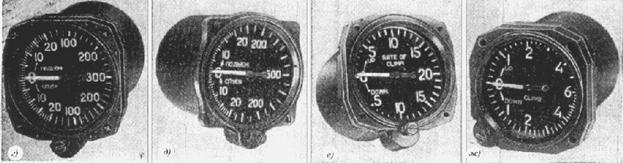 Рис. 3.35. Вариометры: а – ВР-10М; б – ВАР-30М;
Рис. 3.35. Вариометры: а – ВР-10М; б – ВАР-30М;
в – ВАР-75М; г – ВАР-300; д – ВАР-500; е – ВРФ-2; ж – ВРФ-6
Подробнее о принципах отображения и типах индикаторов пилотажных параметров изложено в главе 8.
Глава 4
СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ
4.1. Назначение системы
Система воздушных сигналов (СВС) предназначена для выдачи основной пилотажной информации на указатели контрольно-измерительных приборов в кабине самолета и на бортовые системы. До внедрения СВС на летательных аппаратах ставились отдельные датчики параметров, сигнализаторы и указатели. Причем это делалось в интересах отдельных потребителей независимо от других. В связи с этим могли быть на борту аппарата избыточность несогласованной между собой информации, избыточность массы аппаратуры, неоправданные материальные затраты, усложнения технологии обслуживания оборудования в целом.
Система воздушных сигналов объединила все датчики и указатели в единую идеологию, исключив дублирование и несогласованность информации. СВС – автономная система, состоящая из датчиков первичных аэродинамических параметров, вычислителя и указателей. Она выдает первичные параметры, параметры движения и производные от них.
К первичным параметрам СВС относятся: давление статическое, давление полное, температура торможения, угол атаки местный, угол скольжения местный.
К параметрам движения летательного аппарата, решаемых СВС, относятся: скорость приборная, скорость истинная, число Маха, вертикальная скорость, угол атаки истинный, угол скольжения истинный, температура наружного воздуха.
Первые системы и у нас в стране и за рубежом были аналоговые. К ним относится СВС-72, установленная на многих самолетах, в том числе на Ил‑86, Як-42, Ил-76, Ан-124 и др. Эта система соответствует международному стандарту АРИНК-575 для аналоговых СВС. Ориентировочно с 1975 года интенсивно стали внедряться в эксплуатацию аналого-цифровые СВС, к которым относится СВС-2Ц и др. Аналоговая часть СВС по-прежнему относится к датчикам первичных параметров. На цифровую дозвуковую систему СВС распространяется международный стандарт АРИНК-706 из серии стандартов АРИНК 700 для цифрового борта.
На рис. 4.1 представлена структурная схема дозвуковой СВС по стандарту АРИНК-706. Видно, что система состоит из вычислителя и индикаторов приборной доски. Характерно для этой СВС то, что датчики Рп и Рст конструктивно расположены внутри цифрового вычислителя. Потребители строго регламентированы. По стандартам АРИНК серии 700 все бортовые системы четко разделены по основным своим функциям (об этом см. главу 1). В связи с этим СВС для дозвуковых самолетов имеет ограниченный круг решаемых задач. Тут сказываются требования к простоте эксплуатации оборудования. Выделяются только те параметры, которые являются стандартными для любого самолета.
Рис. 4.1. Структурная схема дозвуковой СВС
В соответствии с минимальными требованиями стандарта НЛГС на борту самолета должно быть установлено необходимое количество приемников и датчиков аэродинамических параметров, о чем было сказано в третьей главе. Один из вариантов оборудования борта в интересах нормальной работы СВС приведен на рис. 4.2.
Рассмотренная выше стандартная СВС сформирована под действием тенденции централизации параметров и разделения систем по функциям. Однако не исключена тенденция децентрализации параметров и пересмотр задач бортовых систем.
Объективными причинами для этого могут быть: резкое увеличение вычислительных способностей вычислителей систем, уменьшение их габаритов и массы, появление датчиков первичной информации со встроенными микропроцессорами. Датчики берут на себя некоторые функции вычислителя СВС (коррекция характеристик, фильтрация, формирование кода). Задачи вычислителя СВС упрощаются, вплоть до его аннулирования.
Возникает возможность интеграции разрозненных, но более интеллектуальных датчиков на более высоком уровне систем. Одним из вариантов может быть таков, когда функции СВС будут схемно и конструктивно объединены с бесплатформенной инерциальной системой (БИНС), которая имеет избыток вычислительной мощности и габаритов.
Системы воздушных сигналов для военных самолетов, для вертолетов и других типов летательных аппаратов могут отличаться от рассмотренной выше стандартной СВС.
Рис. 4.3. Структурная схема СВС для военного самолета
На рис. 4.3 представлена структурная схема СВС для военного сверхзвукового самолета. В первой главе было сказано, что нормы требований стандартов АРИНК и НЛГС для военных самолетов необязательны. Тем не менее, сходство приведенных двух систем большое. Общая идеология сохранена, хотя диапазоны измерения первичных параметров отличаются, разное число потребителей. СВС для вертолета будет отличаться наличием дополнительных специальных измерителей первичных параметров, которые рассматриваются в пятой главе.
4.2. Датчик температуры торможения
Датчик температуры торможения воздушного потока применяется на летательных аппаратах для определения температуры наружного воздуха, в том числе для использования его информации в СВС. Приборы, измеряющие температуру, в общем случае называются термометрами. На борту летательного аппарата они применяются для измерения температуры масла, охлаждающей жидкости цилиндров, карбюратора, выходящих газов реактивного двигателя, температуры торможения воздушного потока.
Коротко рассмотрим методы измерения температуры: объемный, манометрический, термоэлектрический, терморезистивный [13-14].
Объемный метод измерения температуры основан на тепловом расширении различных тел (измерение объема). По этому методу строятся дилатометрические, биметаллические и жидкостные термометры.
Манометрический метод измерения температуры основан на тепловом изменении давления газа (или пара) внутри замкнутого объема. По этому методу действуют газовые и парожидкостные термометры.
Термоэлектрический метод измерения температуры основан на возникновении контактного потенциала между двумя контактирующими между собой разнородными проводниками (полупроводниками) при разности температур свободных и рабочего концов этих проводников.
Терморезистивный – метод измерения температуры основан на изменении электрического сопротивления металлов или полупроводников при изменении температуры.
Для измерения температуры торможения воздушного потока наиболее широкое применение нашел терморезистивный метод (метод термосопротивлений).
Рис. 4.4. Принципиальная схема терморезистивного датчика температуры торможения: 1 – камера торможения потока; 2 – терморезистор; 3 – электропровода
Чувствительным элементом в этом датчике является проволочный или полупроводниковый терморезистор, величина которого зависит от температуры. В общем эта зависимость нелинейная. Для изготовления проволочных терморезисторов применяют чистые металлы, так как они имеют большее значение температурного коэффициента, чем сплавы металлов. Таким металлом является платина. Удельное сопротивление этого металла равно 0,0981 Ом·мм2/м, средний температурный коэффициент электрического сопротивления для интервала 0 – 100 оС равен 3,91·10-3 1/град, температурный интервал измерения от – 250 до 1250 оС.
В диапазоне температур от – 200 до 0 оС платиновый терморезистор имеет следующую зависимость сопротивления R от температуры Q:
![]() , (4.1)
, (4.1)
а в диапазоне от 0 до 600 оС
![]() , (4.2)
, (4.2)
где А = 3,9692·10-3 1/град; В = -5,8290·10-7 1/град2; С = -4,3303·10-12 1/град4; Ro – сопротивление при Q = 0 оС.
Полупроводниковые терморезисторы имеют обратную зависимость R от Q: с увеличением температуры сопротивление уменьшается по экспоненциальному закону:
![]() , (4.3)
, (4.3)
где Т – абсолютная температура; А и В – коэффициенты, зависящие от материала и размеров терморезистора. Их существенным недостатком является малый диапазон измерения температуры, который лежит в пределах от 120 до 180 оС, и существенно нелинейная статическая характеристика.
Характерным представителем датчиков температуры торможения воздушного потока является серийный датчик П-104 (рис. 4.5).
|
|
Рис. 4.5. Внешний вид датчика температуры торможения П-104 | Рис. 4.6. Принципиальная схема датчика температуры торможения П-104: 1 – проволочный термочувствительный элемент; 2 – камера торможения (приемник температуры); 3 – стойка; 4 – фланец; 5 – электрический соединитель |
Датчик П-104 предназначен для измерения температуры торможения потока воздуха и выдачи электрических сигналов, пропорциональных температуре заторможенного потока воздуха, в системы воздушных сигналов и системы регулирования двигателей.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
