

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Измеритель типа КВИС работает следующим образом (рис. 5.20).
Полное (Рп) и статическое (Рст) давления набегающего потока, воспринимаемые бортовым ПВД-6М, подаются в коробки манометрические 20, 29 и корпус указателя соответственно. Под действием разности (Рп - Рст) полного и статического давлений, пропорциональной приборной скорости vпр, происходит перемещение верхних центров коробок манометрических 20 и 29. Данные перемещения через суммирующий передаточно-множительный механизм вызывают вращение стрелки 37.
Работа канала продольной составляющей воздушной скорости vх происходит следующим образом. Давления Рп3 и Рп1 , воспринимаемые ППД-7В в моменты времени t3 и t1, поступают через клапанные механизмы 26 и 23 пневмораспределителя соответственно в нижнюю и верхнюю полости д. ч.э. 31. Разность давлений Рп1 - Рп2 = ΔРх-х вызывает перемещение центра д. ч.э. 31 "вверх" (при полете вперед) или "вниз" (при полете назад). Перемещение центра д. ч.э. 31 через тягу 13 передается кривошипу 12, который поворачивает ось 6 с закрепленным на ней сектором 8. Сектор 8 через трибку 9 передает вращение на стрелку 37 продольной составляющей скорости. При полете вперед стрелка 37 индицирует положительную скорость (правое вращение), при полете назад – отрицательную скорость (левое вращение).
Одновременно с перемещением центра д. ч.э. 31 перемещаются центры манометрических коробок 20 и 29 под действием давления, воспринимаемого от бортового ПВД. Перемещения центров манометрических коробок 20 и 29 через рычажный суммирующий механизм 28, 30, 17 передаются кривошипу 18, который поворачивается вместе с осью 16. При полете с приборной скоростью vnp, меньшей 70 км/ч, поворот оси 16 не вызывает поворота оси 6,. т. к. между поводками 15 и 14 имеется предварительный зазор Δ. При достижении вертолетом скорости vnp = 70 км/ч зазор становится равным нулю, поводок 14 приводит в движение поводок 15 и верхний центр д. ч.э. 31 доходит до упора 32. Одновременно верхний центр манометрической коробки 29 доходит до упора 27 и манометрические коробки отключаются. Начиная со скорости vnp = 70 км/ч, указатель работает от бортового ПВД, а индикация приборной скорости осуществляется с помощью той же стрелки 37, что и индикация продольной составляющей скорости vх . Стрелка 37 продолжает движение только от манометрической коробки 20. Через поводковую пару 14, 15 ее движение передается оси 16 и далее оси 6 с сектором 8, вращающим трибку 9 со стрелкой 37. Работа канала поперечной составляющей воздушной скорости vz аналогична работе канала продольной составляющей воздушной скорости vх. Давления Рп2 и Рп4 через клапанные механизмы 25 и 21 поступают соответственно в верхнюю и нижнюю полости д. ч.э. 33.
Разность давлений Рп2 - Рп4 = ΔРz-z вызывает перемещение центра д. ч.э. 33 "вверх" (при полете вправо) или "вниз" (при полете влево).
Перемещение верхнего центра д. ч.э. 33 через тягу 34 передается кривошипу 11, который поворачивает ось 10 с закрепленным на ней сектором 7. Сектор 7 через трибку 5 передает вращение на стрелку 36 поперечной составляющей скорости vz. Отсчет показаний поперечной составляющей скорости vz производится по внутреннему участку шкалы циферблата 3.
5.4. Всенаправленный измеритель малой скорости с приемником давления на двухстепенном подвесе
Измеритель малой скорости с приемником давления на двухстепенном подвесе, как и измерители ЛОРАС и КВИС, использует эффект наддува в измерительной пневматической системе полного давления. В измерителях ЛОРАС и КВИС наддув достигается за счет окружной скорости приемника давления при его вращении на штанге или на лопасти.
Измеритель малой скорости с приемником давления ПВД на двухстепенном подвесе был впервые разработан в начале семидесятых годов английской фирмой Маркони Авионикс (Marconi Avionics) и получил условное название ЛЭССИ (LASSIE) (рис. 5.21).
| Рис. 5.21. Внешний вид измерителя ЛЭССИ: 1 – индикатор; |
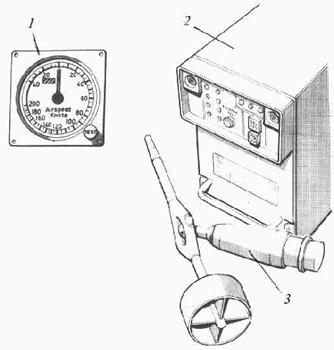
Измеритель ЛЭССИ состоит из индикатора 1, вычислителя 2, датчика 3. Для получения наддува в пневмосистеме Рп датчик 3 измерителя размещается на фюзеляже вертолета под НВ. В процессе вращения НВ скорость отбрасывания потока воспринимается ПВД 1, пропорциональное ей полное давление передается по тракту 7 в вычислитель (рис. 5.22).
Как было показано во второй главе, величина наддува зависит от интенсивности вихря от НВ и составляет 50 – 130 км/ч (таблица 2.5). Это уже достаточно большие скорости, которые можно легко преобразовать в электрические сигналы для обработки их в вычислителе.
Измеритель ЛЭССИ способен воспринимать и вычислять параметры Рп, Рст, Рд, Тт, угол атаки местный αм , угол скольжения βм, скорости по продольной оси ± vх, по попереч ной оси ± vz. Основу системы составляет ее датчик первичных аэродинамических параметров (рис. 5.22). Он представляет собой комбинированное устройство, совмещающее в себе ПВД и флюгер, закрепленные на общей штанге, свободно вращающейся на двухстепенном подвесе 2 относительно осей Х – Х и Z –Z.
Рис. 5.22. Принципиальная схема датчика измерителя ЛЭССИ: 1 – ПВД; 2 – подвес двухстепенной; 3 – датчик угла β; 4 – флюгер; 5 – датчик угла α, 6 – корпус
ПВД и флюгер сами по себе в отдельности не являются оригинальными. Оригинальным является их сочетание вместе с подвесом. В качестве выходных устройств по угловым координатам применены БСКТ. Давления с ПВД (Рп, Рст) передаются на выход устройства через подвижный шарнир с помощью гибких шлангов. Датчик устанавливается на вертолете под несущим винтом и обдувается местным воздушным потоком, который представляет собой сумму потоков от несущего винта и от скорости движения вертолета относительно воздуха. В режиме висения при отсутствии ветра ось Y – Y датчика совпадает с вертикальной осью вертолета Y – Y. Во всех остальных случаях ось Y – Y датчика совпадает по направлению с суммарным вектором воздушного потока (рис. 5.24).
На рис. 5.23 представлена векторная диаграмма воздушных потоков в месте установки датчика ЛЭССИ при полете вертолета по оси X – X без скольжения. В режиме висения весь поток НВ направлен по вектору АД. Плоскость НВ перпендикулярна вектору АД. При движении плоскость НВ наклоняется в сторону предполагаемого движения.
Появляется угол наклона плоскости НВ φ. Вектор потока АД занимает положение АС. По направлению движения вертолета появляется поток ДС – проекция вектора АС на ось X – X. Одновременно, под действием тяги винта, расположенного под углом φ, появляется вектор воздушного потока СВ. Этот вектор пропорционален воздушной скорости. В результате действия потока от НВ и от скорости полета результирующий вектор занимает положение АВ. Как показано на рисунке, датчик отслеживает положение суммарного потока АВ.
По аналогии с самолетом будем обозначать аэродинамические углы через α и β. Под углом α будем понимать аэродинамический угол между проекцией вектора суммарного потока АВ на плоскость ZOX (вектор ДВ) и вектором суммарного потока АВ. Под углом β будем понимать аэродинамический угол между вектором скорости по оси Х - Х (вектор ДВ) и проекцией вектора суммарного потока на плоскость ZOX (вектор ДВ2 , риc. 5.24).
Рис. 5.23. Векторная диаграмма воздушных потоков в месте установки датчика ЛЭССИ при полете вертолета в направлении оси Х – Х без скольжения (β = 0)
Из приведенных определений следует, что полной аналогии аэродинамических углов на вертолете, определяемых с помощью всенаправленного датчика, и на самолете, нет. Тем не менее, это уже аэродинамические углы, однозначно связанные с суммарным аэродинамическим вектором, который на вертолете определяет и несущую и движущую силы. С привлечением дополнительной информации (угол автомата перекоса и др.) можно определить значения аэродинамических углов относительно фюзеляж вертолета. Эти зависимости определяются при трубных продувках и летных испытаниях конкретного вертолета.
В соответствии с векторной диаграммой рис.5.23 для полета без скольжения определим алгоритмы скорости по давлению, воспринимаемому ПВД. Напишем систему уравнений
DВ = DС + СВ
АD = АВ·sin α
DС = АD·tg φ = АВ·sin α·tg φ (5.36)
DВ = АВ·cos α
Решая совместно уравнения системы (5.36) получим:
СВ=DB–DC=AВ·cosα-AB·sinα·tgφ=AB(cos α - sin α·tg φ). (5.37)
Так как вектop СВ пропорционален величине скоростного напора по траектории полета Х - Х: СВ ≡ 0,5 ρ![]() , то скорость равна в околонулевом диапазоне
, то скорость равна в околонулевом диапазоне
![]() . (5.38)
. (5.38)
На рис. 5.24 представлена векторная диаграмма потоков в месте установки всенаправленного датчика аэродинамических параметров при полете вертолета со скольжением (общий случай полета).
Используя известные тригонометрические зависимости, получим систему уравнений для определения вектора СВ:
СВ = DB – DC;
DC = AD·tg φ;
AD = AB2·sin α; (5.39)
DB = DB2·cos β;
DB2 = AB2 cos α.
Решая совместно уравнения системы (5.39) получим формулу для определения скоростного напора, пропорционального скорости полета по оси Х-Х.:
СВ = DB2·cosβ – AD · tgφ = AB2 · cosα · cosβ - AB2 · sinα · tgφ =

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
