


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- индуктивные.
8.2. Размещение детекторов
Эффективность адаптивного управления во многом определяется местом установки ЧЭ ДТ. Оно определяется характером задач, решаемых в рамках локального и системного управления.
При локальном управлении ЧЭ ДТ устанавливают на подходе к перекрестку, обеспечивая реализацию алгоритма МГР.
При системном управлении – ДТ необходимы для автоматического выбора необходимой программы координации по транспортной ситуации в районе, определении скорости движения, включения ЗУ, обнаружения заторов.
Для реализации алгоритма МГР необходимо установить ЧЭ на таком расстоянии от перекрестка, чтобы автомобиль после обнаружения разрыва, пройдя контролируемую ДТ зону, смог своевременно остановиться перед стоп-линией.
Расстояние от ЧЭ ДТ до стоп-линии определяется по остановочному пути:
Sдт = vatpк/3,6+v2a/(26aт), (6)
где tpк – время реакции водителя на смену сигналов светофора; aт – замедление автомобиля при торможении на запрещающий сигнал, м/с2.
По расстоянию Sдт определяют остальные параметры МГР. Подобный подход практически исключает проезд автомобилем перекрестка на желтый сигнал и повышает безопасность движения.
Для автоматического выбора программы координации по транспортной ситуации в районе необходимо определить характерные сечения на УДС с установкой в этих местах ДТ. Информация от них должна дать объективную оценку изменения транспортной ситуации во всем районе управления.
При этом рассматриваются два типа сечений:
- первый тип – сечения в тех местах, где параметры потоков близки по значению параметрам в близлежащей окрестности (определяется интенсивность и скорость движения);
- второй тип – сечения в местах, где параметры резко изменяются (потоки сливаются или ответвляются), измеряется только интенсивность движения см. рисунок 53.
К местам, где устанавливаются ДТ скорости, предъявляются особые требования:
- ЧЭ должны располагаться на второй полосе движения на среднем участке длины перегона;
- расстояние от ЧЭ до перекрестка должно быть таковым, чтобы исключались изменения скорости за счет торможения или разгона автомобилей.
Скорость определяется по времени проезда автомобилем расстояния между двумя последовательно установленными ЧЭ (обычно принимают 5 м).
|
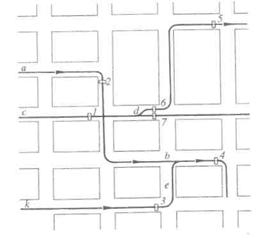
Рисунок 53 – Пример схемы размещения детекторов для выбора программы координации
Наиболее широкое распространение на практике получили пассивные инфракрасные ЧЭ (ДТ-ИК). Их установка не требует вскрытия дорожного полотна, они устанавливаются фиксировано над поверхностью дороги.
На объекте устройство ДТ-ИК может монтироваться на светофорной колонке, мостах, эстакадах, столбах освещения (см. рисунок 54).
Рисунок 54 – Пример установки ДТ на столбе освещения
8.3. Устройство и основные характеристики детекторов
Основные параметры транспортного потока, которые регистрируются с помощью ДТ являются:
1 – моменты времени проезда автомобилями заданных сечений дороги;
2 – интенсивность транспортного потока и объем движения;
3 – средняя пространственная скорость потока на заданном участке дороги и за заданное время измерения;
4 – плотность потока на заданном участке дороги за заданное время измерения;
5 – длина очереди автомобилей у перекрестка в заданном направлении движения.
Современные ДТ могут иметь следующие характеристики параметров измерения:
- число полос измерения – до 8;
- наличие автомобиля в зоне измерения, % - 0 – 100;
- занятость, % - 0 – 100;
- средняя скорость 0 – 160 км/ч.
Устройство ДТ на примере ДТ-ИК показано на рисунке 55.
Рисунок 55 – Структурная схема ДТ-ИК
На плате ПИК-1 в качестве чувствительного элемента в инфракрасном датчике ИКД применён пассивный пироэлектрический элемент, который обеспечивает необходимое измерение выходного сигнала при изменении температуры в контролируемой зоне на 5 °С. Спектр принимаемого ИК излучения исключает влияние на работу датчика чада от выхлопных газов, тумана и водяных паров и обеспечивает независимость от атмосферных условий. Интенсивность контролируемого излучения зависит от температуры объекта, его размеров и структуры поверхности, но не от её цвета или условий освещённости. Поэтому датчик работает круглосуточно.
Плата УП-1 содержит процессор, задачей которого является определение наличия ТЕ в контролируемой зоне на основании анализа сигналов, поступивших с ИКД. Светодиод HL2 индицирует поступление стартовых импульсов на устройство. Светодиод HL1 индицирует сигнал прохождения ТЕ, формируемый процессором.
ИПТ-3 – источник питания, обеспечивающий работу ПИК-1 и УП-3.
Технические характеристики ДТ-ИК.
Принцип обнаружения транспортных единиц (ТЕ) – пассивное инфракрасное детектирование.
Тип работы – детектор прохождения.
Дальность обнаружения ТЕ – 12 м.
Максимальный размер контролируемой зоны (КЗ) – 2 м ´ 2 м по одной полосе в одном направлении движения.
Диапазон рабочих температур – от - 40 до + 50 °С.
Питание – напряжение переменного тока 220 В.
Потребляемый ток – 30 мА (max).
Протокол передачи информации – АСС-УД.
9. ТЕХНИЧЕСКИЕ СРЕДСТВА АСУД
9.1. Классификация систем и технических средств АСУД
АСУД – это комплекс технических, программных и организационных мер, обеспечивающих сбор и обработку информации о параметрах транспортных потоков и на основе этого оптимизирующий управление движением.
АСУД в зависимости от их назначения и степени технической оснащенности подразделяются на несколько видов:
1. Магистральные координированного управления:
- бесцентровые;
- централизованные;
- централизованные интеллектуальные.
2. Общегородские:
- упрощенные;
- интеллектуальные;
- с управлением на городских дорогах непрерывного движения;
- с управлением на дорогах с реверсивным движением.
В классификацию технических средств АСУД по функциональным возможностям входят следующие группы:
- периферийные технические средства (дорожные контроллеры, детекторы транспорта, контроллер зонального центра);
- устройства центрального управляющего пункта (контроллер районного центра, дисплейный пульт оперативного управления, табло коллективного пользования);
- контрольно-проверочная аппаратура (имитатор центра, инженерный пульт).
Структура АСУД показана на рисунке 56.
Рисунок 56 – Обобщенная структурная схема АСУД
9.2. Технические характеристики средств АСУД
9.2.1. Устройства ЦУП АСУД
Устройства ЦУПа выполняют функции координации и диспетчерского управления светофорными объектами и в зависимости от назначения могут быть следующих видов:
1 - специальные устройства – контроллер районного центра (КРЦ), выполняющий функции координации светофорной сигнализации в район управления. КРЦ на базе ПЭВМ устанавливаются в помещении центрального управляющего пункта и служат для выполнения функций управляющего вычислительного комплекса (УВК). Данные устройства обладают программным обеспечением и хранят библиотеку программ координации;
2 - дисплейный пульт оперативного управления (ДПОУ). Пульты управления, предназначены для диспетчерского управления светофорной сигнализацией в АСУ дорожным движением. Пульты оперативного управления выполняют функции набора определённых команд управления и визуальной индикации о выполнении посланных команд. Пульты систем, в состав которых входит УВК (АСУД-С), обладают качественно более высокими функциональными возможностями. Это позволяет диспетчеру не только контролировать состояние всех периферийных объектов, но и вмешиваться в управление как отдельным перекрестком, так и группой перекрёстков, организуя специальные режимы: «Зелёная улица», «Жёлтое мигание» и т. д.;
3 - специальные табло коллективного пользования (ТКП), отражающие конфигурацию управляемого района, места установки технических средств и индикацию, позволяющую контролировать их работоспособность. Функциональная нагрузка, выполняемая ТКП, заключается в выдаче диспетчеру информации об отработке и неисправностях технических средств;
4 - аппаратура обмена информацией, построение которой обусловлено алгоритмами сопряжения периферийных устройств с устройствами центрального управляющего пункта системы. Необходимость уменьшения количества линий связи привела к созданию блоков, имеющих возможность обмена информацией по магистральному каналу связи. Однако сложность узлов ввода-вывода информации, их недостаточная надёжность обусловили разработку данных узлов параллельно с использованием радиального канала связи. К устройствам этого типа относятся устройства согласования УС.
Структурная схема ЦУП АСУД показана на рисунке 57.
Рисунок 57 – Структурная схема ЦУП АСУД
Комплекс вычислительных средств ЦУПа включает следующие устройства:
- СЕРВЕР – ПЭВМ, обслуживающая локальные сети №1 и 2 и модемную связь;
- АРМ ТП – ПЭВМ для сбора и анализа статистических данных о транспортных потоках;
- АРМ деж. – ПЭВМ для оперативного дежурного ЦУПа (получение справок, ввод данных, поступающих по телефону);
- АРМ прог. – ПЭВМ программиста системы для изменения файлов привязки и перекомпоновки ПО;
- ПЭВМ-У – управляющая ПЭВМ на базе КРЦ;
- ТКП – табло коллективного пользования (диагональ 116 см) на базе ПЭВМ;
- М – модем для выхода в ГТС;
- ДПОУ – дисплейный пульт оперативного управления.
Необходимо учитывать, что приведенная структура ЦУПа позволяет проводить расширение района управления АСУД добавлением КРЦ. Такая мера позволяет без изменений и реконструкций увеличивать количество охватываемых перекрестков на 48 с каждым КРЦ.
Проверка технических средств производится с помощью контрольно-диагностической аппаратуры (КДА), применяемой для контроля работоспособности в процессе функционирования КТС, настройки и программирования периферийных устройств.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
