Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Выполните щелчок «мышью» по командной кнопке Продолжить…
График переходного процесса в этом случае (см. рис. 39) свидетельствует, что в нелинейной САР установились высокочастотные (приблизительно гармонические) автоколебания с амплитудой примерно 0.05, что в 2.5 раза превышает ширину зону нечувствительности в Управляющем реле.

Рис. 14
Резюме: нелинейная САР «плохо» отработала управляющее воздействие потому, что при таком значении k1 (0.35/10) не выполняются условия критерия абсолютной устойчивости В. М. Попова (точка –1/K расположена внутри годографа Попова).
Но что же будет, если для увеличения быстродействия и сохранения устойчивости задать коэффициент скоростной эффективности k1=0.35/12 ?
Выполняем расчет.
Оказывается, что система действительно повышает быстродействие и остается устойчивой (!), хотя годограф Попова охватывает точку 1/k – рис. 15 (сравниваем с рис.13).
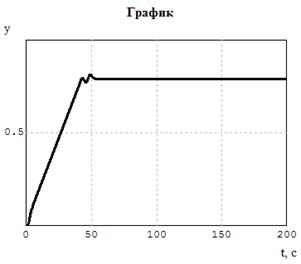
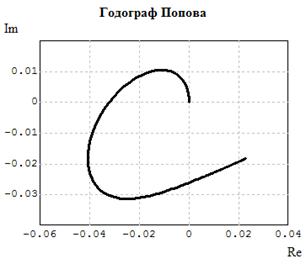
Рис. 15
Этот факт подтверждает, что условие устойчивости, вытекающее из критерия устойчивости Попова, являются достаточным, но не необходимым.
Иными словами: если выполняются условия критерия Попова, то система гарантировано устойчива. Но, если условие Попова не выполняется, то система может быть как устойчива, так и неустойчива.
Контрольные вопросы
1 Как Вы понимаете абсолютную устойчивость?
2 Что такое автоколебания?
3 Как вы понимаете устойчивость состояния равновесия и устойчивость автоколебаний?
4 Как выглядят фазовые портреты нелинейной системы, иллюстрирующие режимы мягкого и жесткого возбуждения автоколебаний.
5 Как определить устойчивость автоколебаний методом энергетического баланса?
6 Что такое гауссов угол?
7 Покажите связь критерия абсолютной устойчивости Попова с критерием Найквиста.
Лабораторная работа 8
Тема: Моделирование САУ с терморегулятором
Цель работы: построить математическую модель реального объекта (бытового утюга) и проанализировать ее свойства.
Задачи работы:
- составить дифференциальные уравнения, описывающие процесс нагрева и охлаждения утюга;
- выбрать регулятор и составить структурную схему САУ;
- выполнить расчеты, варьируя параметры модели;
- оценить влияние параметров САУ на ее характеристики.
Исходные данные:
- электрическая мощность утюга ![]() ;
;
- масса утюга  ;
;
- удельная теплоемкость утюга (стали) ![]() ;
;
- температура окружающей среды ![]() ;
;
- рабочая температура утюга ![]() .
.
Составление уравнений, описывающих процесс
Из соотношений теплового баланса следует, что изменение внутреннего тепла в утюге ![]() равно разности между подводимым теплом
равно разности между подводимым теплом ![]() и теплом, отдаваемым в окружающее пространство
и теплом, отдаваемым в окружающее пространство ![]() , и можно записать:
, и можно записать:  . (1)
. (1)
Из теплотехники известно, что изменение количества тепла, содержащегося в веществе (теле) ![]() пропорционально изменению его температуры
пропорционально изменению его температуры ![]() :
:
 . (2)
. (2)
Количество тепла, отдаваемое в окружающее пространство за единицу времени пропорционально разности между температурой тела и температурой окружающей среды:
 , (3)
, (3)
где ![]() - коэффициент пропорциональности.
- коэффициент пропорциональности.
Тогда, учитывая (2), (3), а также, что подводимое в единицу времени тепло есть подводимая мощность ![]() , соотношение (1) для режима нагрева представим в виде
, соотношение (1) для режима нагрева представим в виде
 или
или  , (4)
, (4)
где ![]() - управляющая функция, отражающая включение и выключение утюга в зависимости от его температуры
- управляющая функция, отражающая включение и выключение утюга в зависимости от его температуры ![]() :
:
 . (5)
. (5)
В уравнениях (3) и (4) неизвестна величина коэффициента пропорциональности ![]() , которая учитывает достаточно большое количество факторов, влияющих на процесс теплообмена тела с окружающей средой при остывании. Это и конвективный теплообмен, и инфракрасное излучение и многое др. Учесть все эти факторы достаточно сложно, но в данном случае этого не требуется.
, которая учитывает достаточно большое количество факторов, влияющих на процесс теплообмена тела с окружающей средой при остывании. Это и конвективный теплообмен, и инфракрасное излучение и многое др. Учесть все эти факторы достаточно сложно, но в данном случае этого не требуется.
Принимая коэффициент ![]() постоянным и одинаковым для режимов нагрева и охлаждения, определим его из следующих практических соображений.
постоянным и одинаковым для режимов нагрева и охлаждения, определим его из следующих практических соображений.
Из опыта известно, что выключенный утюг остывает до температуры ![]() (это составляет
(это составляет ![]() от перепада температуры от
от перепада температуры от ![]() до
до ![]() ) примерно за 0,5 часа или
) примерно за 0,5 часа или ![]() . Таким образом, представляется возможным определить постоянную времени
. Таким образом, представляется возможным определить постоянную времени
 . (6)
. (6)
Из соотношения (6) находим  .
.
Тогда с учетом числовых значений величин уравнение (4) примет вид:
![]() . (7)
. (7)
Схема решения уравнения (7) в ПК МВТУ показана на рис. 1.
Рис. 1
Выбор управления
В качестве управляющего элемента выбираем реле с характеристиками, показанными на рис. 2.
Рис. 2
В данном случае в соответствие с заданием устанавливаем следующие параметры блока:
 - рис.3.
- рис.3.
Рис. 3
При заданных параметрах блок будет иметь характеристику, показанную на рис. 4.
Рис. 4
Структурная схема САУ показана на рис. 5.
Рис. 5
Для выполнения расчетов целесообразно в диалоговом окне «Время интегрирования» задать 400–600 с.
Результаты расчета показаны на рис.6.
Рис. 6
Для исследования качеств построенной системы управления целесообразно рассмотреть ее поведение при вариации следующих параметров:
- рабочая температура в пределах ![]() ;
;
- отклонение от рабочей температуры (точность) – значения: ![]() ;
;
- мощность в пределах .
.
Контрольные вопросы
1 Почему нагрев на ![]() и охлаждение на
и охлаждение на ![]() происходит за различные промежутки времени?
происходит за различные промежутки времени?
2 Как влияют варьируемые параметры на поведение системы?
3 Как определить среднюю потребляемую мощность утюга после его нагрева до рабочей температуры?
4 Как зависит потребляемая мощность от точности поддерживаемой температуры?
5 Как можно применить для анализа данной системы метод «припасовывания»?
6 Как, не изменяя структурную схему, смоделировать отключенный от сети остывающий утюг?
7 Укажите достоинства и недостатки релейных САУ.
Библиографический список
1 Клавдиев, А. А. Теория автоматического управления в примерах и задачах : учеб. пособие. Ч. I / А. А. Клавдиев. – СПб : СЗТУ, 2005. – 74 с.
2 Лазарева, Т. Я. Основы теории автоматического управления : учеб. пособие. 2-е изд., перераб. и доп. / Т. Я. Лазарева, Ю. Ф. Мартемьянов. – Тамбов : Изд-во Тамб. гос. техн. ун-та, 2004. – 352 с.
3 ПК МВТУ (Программный Комплекс «Моделирование в технических устройствах») [Электронный ресурс]. – Режим доступа: http://mvtu. power. bmstu. ru/.
4 Теория автоматического управления: учебник для вузов по спец. «Автоматика и телемеханика». В 2 ч. Ч. I. Теория линейных систем автоматического управления / Н. А. Бабаков, А. А. Воронов, А. А. Воронова [и др].; под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М. : Высш. шк., 1986. – 376 с.
5 Теория автоматического управления: учебник для вузов по спец. «Автоматика и телемеханика». В 2 ч. Ч. II. Теория нелинейных и специальных систем автоматического управления / А. А. Воронов, Д. П. Ким, В. М. Лохин [и др.] ; под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М. : Высш. шк., 1986. – 504 с.
6 Тихонов, А. И. Теория автоматического управления : курс лекций / А. И. Тихонов [Электронный ресурс]. – Режим доступа : http://www. /file/525645/ .
7 Туманов, М. П. Теория управления. Теория линейных систем автоматического управления: учеб. пособие / М. П. Туманов. – М. : МГИЭМ., 2005. – 82 с.
8 Федосов, Б. Т. Теория автоматического управления. ЮНИТА 1 / Б. Т. Федосов [Электронный ресурс]. – Режим доступа : http://model. exponenta. ru/bt/bt_download. html.
9 Федосов, Б. Т. Теория автоматического управления. ЮНИТА 2 / Б. Т. Федосов [Электронный ресурс]. – Режим доступа : http://model. exponenta. ru/bt/bt_cont_3_Met. html.
Учебное издание
Коропец Петр Алексеевич
Федосов Борис Трофимович
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебно-методическое пособие
М. Чеснокова
Техническое редактирование и корректура Т. М. Чесноковой
Подписано в печать 06.09.2011. Формат 60×84/16.
Бумага офсетная. Ризография. Усл. печ. л. 5,05.
Уч.-изд. л. 4,82. Тираж. Изд. № 000. Заказ № .
Ростовский государственный университет путей сообщения.
Ризография РГУПС.
 Адрес университета: 344038, Ростов н/Д, пл. им. Ростовского Стрелкового Полка Народного Ополчения, 2.
Адрес университета: 344038, Ростов н/Д, пл. им. Ростовского Стрелкового Полка Народного Ополчения, 2.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)