Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Структурная схема описанной САУ показана на рис. 4.
Рис. 4
Подбираем коэффициент усиления пропорционального звена таким, чтобы бассейн наполнялся до заданного уровня (с погрешностью не более 5 %) за один час с момента поступления задания: ![]() . Результаты расчета показаны на рис. 5.
. Результаты расчета показаны на рис. 5.
Рис. 5
Как следует из рис. 5, для обеспечения требуемого быстродействия необходимо реализовать большие значения подачи ![]() .
.
Рассмотрим поведение системы при ограниченной (по различным причинам) величине подачи, например,  . Для моделирования ограничения воспользуемся блоком, реализующим линейную зависимость с насыщением на заданном уровне – рис. 6.
. Для моделирования ограничения воспользуемся блоком, реализующим линейную зависимость с насыщением на заданном уровне – рис. 6.
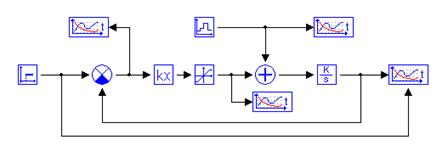
Рис. 6
Результаты моделирования показаны на рис. 7.
Как видно из рис. 7, время переходного процесса возросло с 1 часа до 1,3 часа.
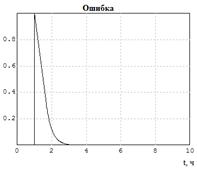
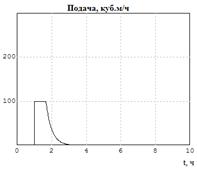

Рис. 7
Если к быстродействию системы не предъявляются высокие требования, то при незначительном увеличении времени переходного процесса можно за счет выбора рационального закона управления существенно сэкономить на мощности требуемого оборудования (в данном случае увеличение времени переходного процесса на 30 % позволило применить оборудование, в 3 раза меньшее по производительности).
В то же время справедливо и обратное – для повышения быстродействия при линейном (пропорциональном) законе управления требуются большие резервы управляющего воздействия.
Рассмотрим работу системы без ограничений, но при наличии расхода ![]() , закон изменения которого показан на рис. 3.
, закон изменения которого показан на рис. 3.
Результаты расчета показаны на рис. 8, из которого видно, что в те промежутки времени, когда имеется отличный от нуля расход, появляется статическая ошибка регулирования.
Следовательно, разработанная САУ является астатической по заданию и статической по возмущению.
Для устранения статической ошибки необходимо повысить порядок астатизма путем включения интегрирующего звена на участке прямого канала управления между точкой подключения задания и точкой приложения возмущения (в данном случае – расхода).
Включаем интегрирующее звено параллельно звену пропорциональному. Если регулятор имеет только пропорциональное звено, то его называют П-регулятором. А если регулятор содержит и пропорциональное и интегрирующее звено, то такой регулятор называют ПИ-регулятором.
Интегрирующее звено способно иметь на выходе отличный от нуля сигнал при нулевом сигнале на входе (в данном случае – сигнал ошибки). Если ошибка отлична от нуля, то интегратор вырабатывает нарастающий со временем сигнал, направленный на компенсацию ошибки, и этот процесс продолжается до тех пор, пока ошибка не станет равной нулю. Но при этом выходной сигнал интегратора примет и сохранит то постоянное значение, при котором ошибка обнулилась.
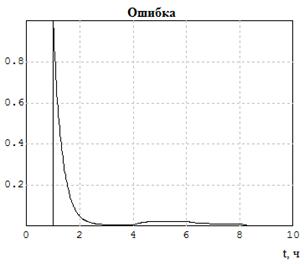
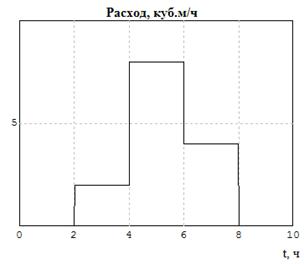
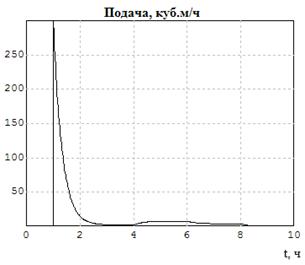
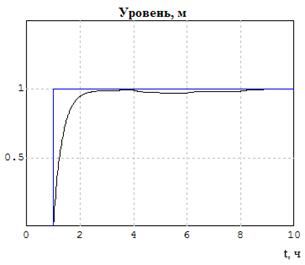
Рис. 8
Структурная схема САУ с ПИ-регулятором показана на рис. 9.
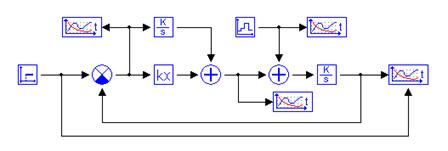
Рис. 9
Параметры САУ следующие:
- коэффициент усиления пропорционального звена  ;
;
- коэффициент усиления интегратора  ;
;
- расход ![]() , начинается с 5 часа от начала процесса и сохраняет свое значение в течение следующих 5 часов.
, начинается с 5 часа от начала процесса и сохраняет свое значение в течение следующих 5 часов.
Результаты расчета показаны на рис. 10.
Из рисунка следует, что после установки интегратора в переходном процессе появилось перерегулирование (примерно 16 %).
Однако статическая ошибка от возмущения (расхода) отсутствует. Пропорциональное звено в этом случае имеет на выходе ноль. При нулевой ошибке интегратор вырабатывает управляющий сигнал – обеспечивает подачу, необходимую для компенсации расхода.
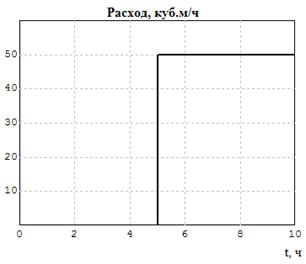
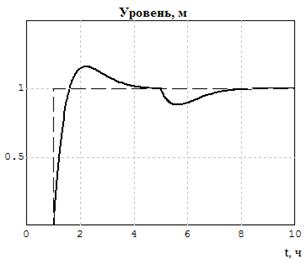
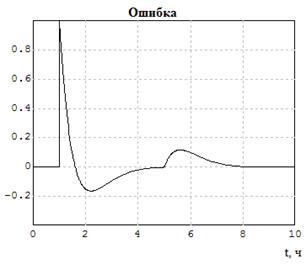
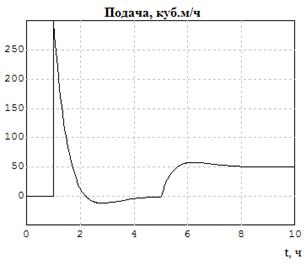
Рис. 10
Изменяя коэффициенты ![]() и
и ![]() , можно влиять на параметры переходного процесса: такие, как перерегулирование и время регулирования (рекомендуется проверить самостоятельно).
, можно влиять на параметры переходного процесса: такие, как перерегулирование и время регулирования (рекомендуется проверить самостоятельно).
Определим величину статической ошибки для САУ с П - и ПИ-регуляторами
Передаточная функция прямого канала управления ![]() ,
,
где ![]() и
и  – передаточные функции регулятора и объекта управления соответственно.
– передаточные функции регулятора и объекта управления соответственно.
Для системы с единичной обратной связью
- передаточная функция ошибки по заданию  ;
;
- передаточная функция ошибки по возмущению  .
.
Ошибка при одновременном воздействии и задания и возмущения
![]() .
.
В статическом режиме следует принять ![]() . Тогда при переходе к оригиналам, получим:
. Тогда при переходе к оригиналам, получим:
![]() .
.
Для САУ с П-регулятором имеем:
 ,
,  ,
,  ;
;
 ;
;  .
.
При ![]() получим:
получим:  ,
,  .
.
Для варианта, показанного на рис. 8, будет:
- в интервале времени 4–6 ч ![]() ;
;
- в интервале времени 6–8 ч ![]() , что полностью согласуется с результатами моделирования.
, что полностью согласуется с результатами моделирования.
Для САУ с ПИ-регулятором:
,  ,
,  ;
;
 ;
;  .
.
Очевидно, что при ![]() , будет: ,
, будет: ,  и
и  , что также согласуется с результатом моделирования – рис. 10.
, что также согласуется с результатом моделирования – рис. 10.
Если возмущение (расход) изменяется по закону, содержащему компоненты скорости и ускорения, то возникнут ошибки регулирования, обусловленные этими компонентами. Для их компенсации необходимо увеличивать порядок астатизма САУ.
Контрольные вопросы
1 Что называется управлением?
2 Что называется автоматическим управлением?
3 Что называется системой автоматического управления?
4 Что является основной задачей автоматического управления?

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)