

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (5) |
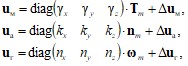
где diag(…) – условное обозначение диагональных матриц масштабных коэффициентов (3Ч3); гx, гy, гz, kx, ky, kz, nx, ny, nz – масштабные коэффициенты соответствующих измерительных каналов ТМБ, ТБА, ТБГ; Tm, nm, щm – векторы напряженности магнитного поля, кажущегося ускорения и угловой скорости вращения основания, заданные в связанном трехграннике m = XYZ; Дuм, Дuа, Дuг – векторы нулевых сигналов ТБМ, ТБА, ТБГ.
В свою очередь, измеряемые векторы напряженности магнитного поля (Tm), кажущегося ускорения (nm) и абсолютной угловой скорости (щm) вращения подвижного объекта, заданные в связанном ортогональном трехграннике m = XYZ, описываются с помощью уравнений Пуассона и Эйлера [2]:
| (6) |
| (7) |
| (8) |
где ![]() ,
, ![]() , gq, Щq – векторы напряженности магнитного поля Земли (МПЗ), магнитного поля помех (МПП), поля тяжести Земли (ПТЗ) и угловой скорости вращения Земли, заданные в географическом трехграннике q = NHE; TМПО, аm,
, gq, Щq – векторы напряженности магнитного поля Земли (МПЗ), магнитного поля помех (МПП), поля тяжести Земли (ПТЗ) и угловой скорости вращения Земли, заданные в географическом трехграннике q = NHE; TМПО, аm, ![]() – векторы напряженности магнитного поля объекта (МПО), абсолютного линейного ускорения основания и угловой скорости дрейфа гироскопов, заданные в связанном трехграннике m = XYZ; (
– векторы напряженности магнитного поля объекта (МПО), абсолютного линейного ускорения основания и угловой скорости дрейфа гироскопов, заданные в связанном трехграннике m = XYZ; (![]() ,
,![]() ,
,![]() )q – векторы угловых скоростей вращения ПО по рысканию, тангажу и крену относительно Земли, заданные в неподвижном трехграннике q = NHE; Bм, Bа, Bг – матрицы (3×3) сборки ТБМ, ТБА, ТБГ; M – матрица монтажа МИМ на объекте; A – матрица ориентации ПО; S – матрица коэффициентов Пуассона; E – единичная матрица (3×3).
)q – векторы угловых скоростей вращения ПО по рысканию, тангажу и крену относительно Земли, заданные в неподвижном трехграннике q = NHE; Bм, Bа, Bг – матрицы (3×3) сборки ТБМ, ТБА, ТБГ; M – матрица монтажа МИМ на объекте; A – матрица ориентации ПО; S – матрица коэффициентов Пуассона; E – единичная матрица (3×3).
Из анализа выражений (1)–(8) видно, что на показания МИМ (u) оказывают влияние внешние и внутренние факторы двух типов [3]:
- полезные воздействия, связанные с полезной информацией (Тмпз, g, Щ, A, г0; k0; n0); дестабилизирующие воздействия, связанные с действием внешних и внутренних возмущений (ТМПО, S, Дgq, аm,
Алгоритмы обработки многомерной информации (u, uм, uа, uг) формируются на основе обращения метрологических характеристик модуля (5), а также уравнений Пуассона и Эйлера (6)–(8). Однако для получения рабочих алгоритмов, гарантирующих корректное решение соответствующих задач с ограниченным уровнем допустимых погрешностей, важно предварительно провести комплекс операций, входящих в содержание методико-технологического обеспечения (МТО) [3, 6, 7]. Следует иметь в виду, что от качества и полноты выполнения МТО модуля зависят в конечном счете показатели точности, надежности, долговечности и работоспособности МИМ в условиях эксплуатации.
В настоящей работе обосновывается необходимое содержание МТО МИМ – методик, алгоритмов и технологий проведения операций, обеспечивающих предварительную идентификацию дестабилизирующих технологических факторов и их последующий учет в алгоритмах автономной работы. МТО МИМ выполняется в четыре этапа (рис. 1):
- технологическая калибровка блоков МИМ, которая сводится к проведению метрологической (г, k, n, Дuмо, Дuао, Дuго), температурной (Дг(Дt), Дk(Дt), Дn(Дt), Дuм(Дt), Дuа(Дt), Дuг(Дt)) и режимной калибровок (Дг(Дu), Дk(Дu), Дn(Дu), Дuм(Дu), Дuа(Дu), Дuг(Дu), а также аналитической юстировки (Вм, Ва, Вг); объектовая калибровка МИМ, предполагающая идентификацию МПО (S, ТМПО) и аналитическую юстировку модуля (M); аттестация рабочего места и маршрута, которая заключается в позиционировании базовых и контрольных точек (ц0; л0; h0); (ц; л; h), измерении МПЗ в базовых и контрольных точках (
- паспортизация рабочего места и маршрута в виде измерений параметров реальных геофизических полей (ГФП): магнитного поля реального (МПР), поля тяжести реального (ПТР) – в контрольных и базовых точках, вычисления параметров нормальных ГФП: магнитного поля Земли нормального (МПЗ-Н), поля тяжести Земли нормального (ПТЗ-Н), определения магнитных и гравитационных аномалий и вариаций (ДТМПЗ, Дg, дТМПЗ, дg).

Рис. 1. Методико-технологическое обеспечение МИМ
Общая задача МТО МИМ заключается в определении численных значений параметров, входящих в уравнения (5)–(8) и характеризующих индивидуальные свойства модуля как измерителя и среды его использования (МПО, МПП). Если в результате выполнения МО, АО, ПО, ТО модуля получаем ответы на вопрос: «Что делать?», то при выполнении его МТО формулируется ответ на вопрос: «Как делать?» (чтобы реализовать соответствующие МО, АО, ПО, ТО). Из вышесказанного следует, что МТО МИМ сводится к индивидуальной аттестации и паспортизации модуля как измерителя и среды его использования. Причем аттестация и паспортизация МИМ как измерителя выполняются, как правило, в лабораторных условиях в МПЗ с известными параметрами, например в идеальном МПЗ-Н (не искаженном магнитными аномалиями и вариациями). Аттестация и паспортизация среды (рабочего места (РМ), маршрута) выполняются в результирующем магнитном поле (МПР) с учетом проявления искажений со стороны аномалий и вариаций.
Технологическая калибровка МИМ
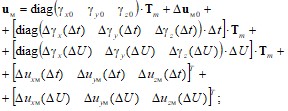
Анализ метрологических характеристик (5) блоков МИМ показывает, что векторы масштабных коэффициентов г0, k0, n0 блоков, их вариации Дг, Дk, Дn и нулевые сигналы Дuм, Дua, Дuг являются многомерными функциями, зависящими от полезных воздействий (Tx, Ty, Tz, nx, ny, nz, ωx, ωy, ωz) и по крайней мере от двух дестабилизирующих факторов – изменения температуры (Дt) и режима питания (ДU). С учетом этого метрологические характеристики модуля (5) можно линеаризовать:
- для ТБМ
| (9) |
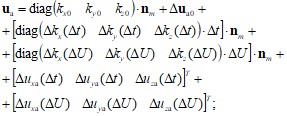
- для ТБА
| (10) |
- для ТБГ
| (11) |
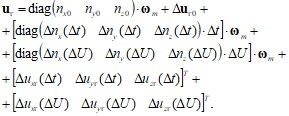
Правые части линеаризованных метрологических характеристик блоков (9)–(11) содержат члены, соответствующие пяти составляющим:
- номинальным метрологическим характеристикам блоков (с нулевыми индексами); мультипликативным температурным погрешностям Дг(Дt), Дk(Дt), Дn(Дt); мультипликативным режимным погрешностям Дг(ДU), Дk(ДU), Дn(ДU); аддитивным температурным погрешностям Дuм(Дt), Дua(Дt), Дuг(Дt); аддитивным режимным погрешностям Дuм(ДU), Дua(ДU), Дuг(ДU).
Эти погрешности устанавливаются экспериментальным путем индивидуально для каждого модуля, его блоков и соответствующих каналов измерений на основе использования технологии проведения однофакторных калибровок: метрологических, температурных, режимных [3]. Вместе с тем на основе выражений (5) с учетом одновременного проявления в эксплуатации дестабилизирующих факторов (Дt, ДU) могут быть проведены более точные многофакторные калибровки МИМ (например, двухфакторные температурно-режимные калибровки).
После выполнения метрологических, температурных и режимных калибровок проводится аналитическая юстировка ТБМ, ТБА, ТБГ модуля, в задачу выполнения которой входит определение геометрических и технологических погрешностей, характеризующих нарушение условий ортогональности и коллинеарности соответствующих осей чувствительности блоков относительно измерительных осей ортогонального связанного трехгранника m = XYZ. Эти погрешности учитываются с помощью матриц сборки Bм, Ba и Bг, общая структура построения которых в линеаризованной форме отражается с помощью обобщенной матрицы B [3]:
| (12) |
 ,
,где бx, вx, бy, вy, бz, вz – геометрические погрешности блоков (углы перекосов осей чувствительностей ТБМ, ТБА, ТБГ относительно осей базового трехгранника m = XYZ).
Для идентификации этих погрешностей необходимо провести серию тестовых (идентификационных) экспериментов в лабораторных условиях [3, 6, 7]. При этом соответствующая грань приборного трехгранника m = XYZ (XY, XZ или YZ) поворачивается в горизонтальной плоскости (ϑ = г= 0) вокруг вертикальных осей (Z, Y, X) на различные углы курса (ш = var, ш∈0, ±90о, ±180о, ±270о), фиксируемые относительно азимутальных направлений базовых плоскостей географического меридиана NOH (для ТБА и ТБГ) и плоскости геомагнитного меридиана SmON (для ТБМ).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
