

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Технологическая калибровка МИМ и его блоков проводится, как правило, в лабораторных условиях.
Объектовая калибровка МИМ
После установки на объект откалиброванного модуля на метрологические свойства его блоков будут оказывать дестабилизирующее влияние два дополнительных фактора:
- искажения в показаниях ТБМ, обусловленные влиянием МПО; геометрические погрешности монтажа модуля на объекте (M).
Для учета влияния этих факторов на втором этапе проводятся операции идентификации МПО и аналитической юстировки всего модуля.
Операция идентификации параметров МПО сводится к проведению серии (i) тестовых (идентификационных) экспериментов в эталонном магнитном поле (например, в МПЗ с априорно известными и стабильными во времени параметрами) с последующим вычислением параметров МПО (ТМПО, S) по алгоритмам магнитной идентификации. Тогда с учетом малости погрешностей монтажа (M ≈ E) и эталонности геомагнитного поля (ТМПО ≈ 0) на основании уравнения Пуассона (6), составленного для каждого i-го тестового эксперимента, можно сформировать систему алгебраических уравнений [4] относительно неизвестных параметров вектора ТМПО и матрицы коэффициентов Пуассона S:
| (13) |
| (14) |
 ,
,
| (15) |
где P, Q, R – проекции вектора ТМПО на оси связанного трехгранника m = XYZ; a, b, c, d, e, f, g, h, k – коэффициенты Пуассона; Tmi, Txi, Tyi, Tzi – векторы результирующего магнитного поля и их проекции на оси связанного трехгранника m = XYZ, зафиксированные в i-м тестовом эксперименте.
При этом матрица ориентации ПО в пространстве варьируется от эксперимента к эксперименту:
| (16) |
где Ai – матрицы ориентации A, сформированные для i-го эксперимента; ![]() ,
, ![]() ,
, ![]() – матрицы углов крена, тангажа и курса, сформированные для каждого i-го эксперимента.
– матрицы углов крена, тангажа и курса, сформированные для каждого i-го эксперимента.
При n > 4 система уравнений (15) содержит функционально избыточную информацию, соответствующую повышению достоверности получаемых результатов магнитной идентификации.
На основе систем уравнений (15) с учетом соотношений (13), (14), (16) сформируем линейную систему 3n алгебраических уравнений степени 3n = 3·4 = 12, которую запишем в компактной векторно-матричной форме [4]:
x = N·y, | (17) |
| (18) |
| (19) |
где x, y – векторы входной и выходной информации; N – матрица (12×12) магнитной идентификации; Tx1, Tx2, Tx3, Tx4, Ty1, Ty2, Ty3, Ty4, Tz1, Tz2, Tz3, Tz4 – значения проекций векторов Tmi на оси связанного трехгранника m = XYZ, измеренные с помощью ТБМ в каждом i-м тестовом эксперименте (![]() ).
).
Алгоритм магнитной идентификации объекта в точке установки МИМ может быть получен на основе решения векторно-матричного уравнения (17):
| (20) |
Для того чтобы решение уравнения (20) существовало и было единственным и устойчивым, необходимо чтобы матрица магнитной идентификации N была несингулярной:
det N ≠ 0, | (21) |
| (22) |
Задача разработки алгоритмов магнитной идентификации основания значительно упрощается с учетом того, что матрица магнитной идентификации N всегда оказывается блочной:
| (23) |
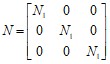 ,
,где N1 – блок-матрица (4×4). Причем
| (24) |
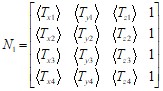 ,
,где ![]() ,
, ![]() ,
, ![]() (
(![]() ) – оценки вектора TМПЗ на оси связанного трехгранника m = XYZ, вычисленные в каждом i-м эксперименте.
) – оценки вектора TМПЗ на оси связанного трехгранника m = XYZ, вычисленные в каждом i-м эксперименте.
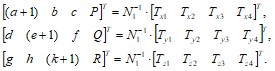
Элементы матрицы-блока N1 вычисляют по формулам приведения
| (25) |
где TN, TH, TE, – северная, вертикальная и восточная проекции вектора ![]() на оси географического трехгранника q = NHE.
на оси географического трехгранника q = NHE.
С учетом соотношений (23)–(25) алгоритмы магнитной идентификации основания можно представить в следующем виде:
| (26) |
После выполнения операций калибровок МИМ на объекте известны численные значения компонент матриц M, S и составляющих вектора ТМПО.
После монтажа МИМ на объекте на показания модуля будут оказывать дестабилизирующее влияние не только МПО, но и погрешности установки модуля на объекте. Эти погрешности носят геометрический стационарный характер и могут быть учтены с помощью матрицы монтажа M, элементы которой формируются в соответствии со схемой Эйлера–Крылова [3]:
М = Му·Мв·Мб. | (27) |
где Mу, Mв, Mб – матрицы геометрических погрешностей монтажа модуля на объекте; б, в, у – погрешности установки модуля на объекте.
С учетом малости погрешностей монтажа модуля на объекте (б, в, у) матрица M может быть линеаризована и приведена к диагональному кососимметричному виду [4]:
| (28) |
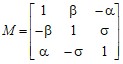 .
.Путем обращения уравнений (6) и (7) можно получить следующие оценки:
| (29) |
 .
.где ![]() ,
, ![]() – оценки векторов напряженности результирующего магнитного поля и напряженности ПТЗ в связанном трехграннике m = XYZ;
– оценки векторов напряженности результирующего магнитного поля и напряженности ПТЗ в связанном трехграннике m = XYZ; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – оценки проекций векторов
– оценки проекций векторов ![]() ,
, ![]() на оси связанного трехгранника m = XYZ.
на оси связанного трехгранника m = XYZ.
Введем обозначения:
| (30) |

Тогда систему уравнений (29) можно привести к развернутому виду векторно-матричных уравнений:
| (31) |
 ,
,
| (32) |
 .
.На основе использования системы уравнений (31) и (32) можно путем комбинирования разнородных по физическому виду скалярных уравнений сформировать ![]() – 2 = 18 вариантов решения задачи аналитической юстировки МИМ на объекте. Этот факт создает условия для обеспечения функциональной избыточности, что способствует повышению точности решения задачи технологической калибровки [4].
– 2 = 18 вариантов решения задачи аналитической юстировки МИМ на объекте. Этот факт создает условия для обеспечения функциональной избыточности, что способствует повышению точности решения задачи технологической калибровки [4].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
