

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (21) |

где D – матрица ориентации осей связанного базиса (m) относительно осей траекторного трехгранника (t). Причем
| (22) |
где Dс, Dш, Dу – матрицы углов вращения (с), рыскания (ш) и тангажа (у), объекта относительно трехгранника ![]() ;
; ![]() – направляющие косинусы углов ориентации.
– направляющие косинусы углов ориентации.
С учетом матричного соотношения (22) на основании системы векторно-матричных уравнений (21) можно получить преобразованную относительно направляющих косинусов ![]() систему уравнений
систему уравнений
| (23) |
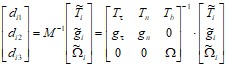
где M – квадратная матрица (3Ч3); Tф, Tn, Tb – проекции вектора ![]() на оси трехгранника
на оси трехгранника ![]() .
.
Детерминант матрицы M равен
| (24) |
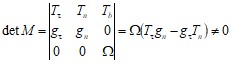 .
.На основе матричного уравнения (22) можно получить формулы для вычисления значений эйлеровых углов у, ш, с (тангажа, рыскания и вращения):
| (25) |
 ,
, ,
, ,
, .
.Полученные формулы (14)–(25) могут быть использованы как в алгоритмах НВО и АП БР на старте, так и в алгоритмах автономной ориентации ГЧ БР на траекториях и КА на орбитах. На основании исходных векторно-матричных уравнений (21) могут быть сформированы алгоритмы автономной ориентации подвижных объектов в условиях функциональной избыточности информации.
Алгоритмы автономной дифференциальной
геомагнитной навигации объектов РКТ
Одной из обратных задач магнитометрии является задача автономной дифференциальной геомагнитной навигации (ДГМН) ГЧ БР на баллистических траекториях и КА на орбитах. Зная начальные условия пуска ГЧ БР и последней ступени РН (r0, v0, и0), можно однозначно определить программную (расчетную) траекторию (орбиту) и ее след на поверхности Земли (трассу). Если в окрестности программной баллистической траектории для дискретно заданных базовых точек A, B, C, D… вычислить по формулам МПЗ-Н координатно привязанные значения компонент вектора ![]() и элементы тензора второго порядка
и элементы тензора второго порядка
| (26) |
 ,
,где (![]()
![]() – градиенты МПЗ по координатам ц, л, r), то совокупность всех базовых точек с численными значениями параметров МПЗ в этих точках образует дискретную геомагнитную сетку (ГМС), как сетку ориентиров (реперов). Данные о ГМС формируются в предстартовых условиях при разработке полетного задания [9].
– градиенты МПЗ по координатам ц, л, r), то совокупность всех базовых точек с численными значениями параметров МПЗ в этих точках образует дискретную геомагнитную сетку (ГМС), как сетку ориентиров (реперов). Данные о ГМС формируются в предстартовых условиях при разработке полетного задания [9].
В контрольной точке K, лежащей на реальной баллистической траектории и удаленной от ближайших базовых точек A, B, C, D на расстояния ![]() ,
, ![]() ,
, ![]() ,
, ![]() соответственно, с помощью ТБМ, входящего в состав МИМ, производятся измерения текущих значений вектора результирующего магнитного поля
соответственно, с помощью ТБМ, входящего в состав МИМ, производятся измерения текущих значений вектора результирующего магнитного поля ![]() , заданного в связанном с объектом трехграннике
, заданного в связанном с объектом трехграннике ![]() .
.
С учетом паспортизированных при предварительно проведенных магнито-геометрических и метрологических калибровках МИМ параметров вектора ![]() и матриц S, Bм, M показания ТБМ приводят к немагнитному ортонормированному основанию и находят приведенный вектор:
и матриц S, Bм, M показания ТБМ приводят к немагнитному ортонормированному основанию и находят приведенный вектор:
| (27) |
Из геометрических соображений находят радиус-вектор r текущей контрольной точки K [9]:
| (28) |
где r0 – радиус-вектор ближайшей базовой точки; Дr – радиус-вектор, характеризующий положение объекта в контрольной точке K относительно базовой точки.
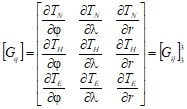
В каждой контрольной точке K вычисляют разностный вектор:
| (29) |
где ![]() – тензор второго порядка (тензор градиентов от компонент МПЗ); ДTN, ДTH, ДTE – компоненты разностного вектора.
– тензор второго порядка (тензор градиентов от компонент МПЗ); ДTN, ДTH, ДTE – компоненты разностного вектора.
Обращением векторно-матричного уравнения (29) получаем
| (30) |
где ![]() – матрица функций чувствительностей.
– матрица функций чувствительностей.
Тогда алгоритм ДГМН можно записать в компактном виде:
| (31) |
или
| (32) |
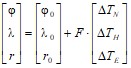 ,
,где ц, л, r – сферические координаты контрольной точки; ц0, л0, r0 – сферические координаты базовой точки.
Свойство отказоустойчивости КСОН при решении задачи автономной ДГМН обеспечивается за счет многократного использования алгоритма ДГМН для определения позиционирования одной и той же точки K относительно нескольких базовых точек A, B, C, D.
Следует отметить, что алгоритм ДГМН позволяет решить не только задачу автономной навигации БР или КА, но и задачу автономного геомагнитного приведения ГЧ БР к цели, если в программу полета на последних этапах баллистической траектории в качестве конечной базовой точки включить точку F цели с координатно привязанными значениями параметров МПЗ. Алгоритм приведения ГЧ
| (33) |
соответствует условию косвенного наведения ГЧ БР на цель с помощью магнитометрического канала измерений.
Следует отметить, что работоспособность алгоритма автономной ДГМН объектов была проверена и подтверждена путем математического моделирования реального режима полета аппарата по замкнутому маршруту. Расхождений между программной (заданной в прямой задаче магнитометрии) и расчетной (полученной при решении обратной задачи магнитометрии) в математическом эксперименте не обнаружено.
Таким образом, показана принципиальная возможность и практическая целесообразность решения задач автономной начальной выставки СОН и БР, азимутального алгоритмического прицеливания ракеты на старте, автономной ориентации, навигации и наведения ГЧ БР на баллистических траекториях и КА на орбитах на основе принципа комбинирования СИ и решения обратных задач бортовых измерений с использованием, в частности, магнитоинерциальной информации.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
, , Трунов управления текущими и конечными параметрами. Сравнительный анализ и их место в теории и практике систем управления летательными аппаратами // Тр. / ФГУП НПЦАП. Системы и приборы управления. 2007. Т. 1, № 1. С. 48–60. , Немкевич построения, облик и особенности летной отработки интегрированной инерциально-спутниковой системы навигации и ориентации космических средств выведения // Тр. / ФГУП НПЦАП. Системы и приборы управления. 2008. Т. 3, № 1. С. 2–26. , , Мусатов способ решения обратных задач бортовой магнитометрии // Приборы и приборные системы : тез. докл. Тула : ТГТУ, 1994. С. 95,96. , , Алгоритмическое обеспечение многомерных измерений с учетом технологических и эксплуатационных факторов // Состояние и проблемы технических измерений : тез. докл. М : Изд-во МГТУ, 1994. С. 97–98. , , Спиридонов калибровки блока магнитометров (алгоритмы, методика, технологии) // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2013. Вып. 15 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. С. 115–131. , , Астахов модели неоднородного магнитного поля Земли в околоземном пространстве // Тр. / Военно-космическая академия им. . 2014. № 000. С. 147–152. , Распопов построения бесплатформенных инерциальных навигационных систем СПб. : ГНЦ РФ ЦНИИ "Электроприбор"», 2009. 280 с. Ориентация и навигация подвижных объектов: современные информационные технологии / под общ. ред. , , . М. : Физматлит, 2006. 424 с. , , Ляшенко геомагнитная навигация подвижных объектов // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2016. Вып. 20 : Теоретические и экспериментальные исследования, компьютерные технологии. Методические аспекты физического образования Экономика в промышленности. С. 13–22.
УДК 621.317

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
