

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На заключительном этапе полета МБР по баллистической траектории требуется обеспечить условие для эффективного наведения резделяющихся боеголовок (РБГ) на точечные индивидуальные цели [20]. Боеголовки РБГ при разделении закручиваются вокруг продольной оси с угловыми скоростями щ0, составляющими величины от нескольких единиц до нескольких десятков (20…40) герц. Режим принудительного вращения РБГ может быть рационально использован для эффективного решения задач автономной навигации, наведения и самонаведения РБГ в условиях ограничений на масс-габаритные параметры, энергопотребление, а также с учетом показателей технологичности и экономичности СОН [10–13, 26]. С этой целью в состав КСОН, устанавливаемых на РБГ, предлагается включить МИМ и координатор цели в виде безгироскопной оптической головки самонаведения (ОГС) (рис. 4) [14], при этом исключить ГСП как достаточно дорогостоящее, ненадежное и крупногабаритное устройство.
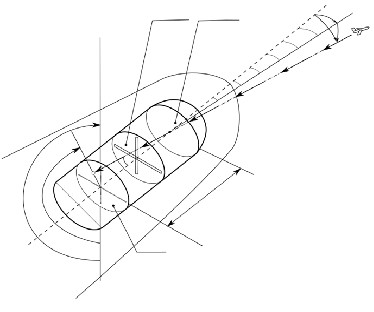

Рис. 4. Схема формирования линии визирования с помощью координатора цели
С учетом фактора вращения РБГ с угловой скоростью щ0 вокруг продольной оси X можно предварительно решить ряд вспомогательных задач:
- хронометрирование измерительных и вычислительных процессов с частотой щ0; модуляция сигналов гармоническая (для МИМ) и широтно-импульсная (для ОГС); пространственно-временная синхронизация измерительных и вычислительных процессов; косвенное (аналитическое) горизонтирование основания; сканирование геофизических полей (МПЗ, ПТЗ),
способствующих повышению эффективности решения основных задач автономной навигации, ориентации и наведения снаряда.
С учетом проявления указанных сервисных функций вращающегося основания (РБГ) на выходе МИМ и ОГС формируются гармонически модулированные (МИМ) и широтно-импульсно модулированные (ОГС) сигналы, в амплитудах, текущих значениях, фазах и сдвигах фаз которых содержится полезная информация о траекторных, навигационных параметрах, а также о параметрах самонаведения и автономной ориентации РБГ в пространстве.
В процессе вращения РБГ с помощью КСОН (МИМ+ОГС) формируются шесть измерительных каналов: магнитометрический; хронометрический; тахометрический (гироскопический); инерциальный (акселерометрический); оптического самонаведения (ОСН); геомагнитного самонаведения (ГМСН).
Приборная информация в виде выходных сигналов всех измерительных каналов КСОН подается на вход общего МК, в котором она по специальным алгоритмам обработки информации преобразуется в выходную (траекторную, навигационную, позиционную) информацию.
Хронометрический канал включает в свой состав генератор хроноимпульсов (ГХИ) и таймер, которые могут быть воспроизведены программным путем с помощью МК. Хронометрический канал работает в тесной связи с магнитометрическим каналом, который позволяет определять моменты прохождения РБГ вертикального (горизонтального) положения. В пределах каждого полупериода (полуоборота) производится таймером подсчет чисел хроноимпульсов (N0, N), с помощью которых по алгоритмам автономного хронометрирования вычисляются параметры текущего положения РБГ [10, 11]:
| (13) |
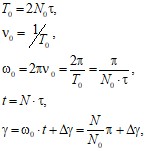
где N0, N – числа хроноимпульсов, подсчитанных таймером за полупериод (полуоборот) и текущее время t (t≤T0/2); T0, н0, щ0 – период, частота и угловая скорость вращения РБГ; г, Дг – текущее значение угла вращения РБГ и поправка к вычислениям; ф – цена одного хроноимпульса.
Поправка Дг вычисляется по специальным алгоритмам [10, 11]. Аналитическим путем можно получить математическое описание магнитограмм, тахограмм и динамограмм, формируемых в виде гармонических функций на основе обработки выходных сигналов блоков ТБМ, ТБГ и ТБА, соответственно [11]:
- ТБМ
| (14) |
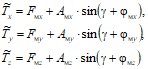 ;
;- ТБА
| (15) |
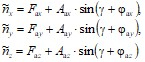 ;
;- ТБГ
| (16) |
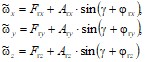 ,
,где Fм, Fа, Fг – векторы смещений нулевых сигналов ТБМ, ТБА, ТБГ:
| (17) |
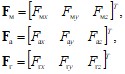 ;
;Aм, Aа, Aг – векторы амплитуд магнитограмм, тахограмм и динамограмм соответственно:
| (18) |
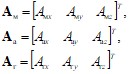 ;
;цм, ца, цг – векторы начальных фаз магнитограмм, тахограмм и динамограмм:
| (19) |
 .
.Компоненты векторов (17)–(19) доступны измерениям (т. е. являются наблюдаемыми в каждый момент времени t), и они позволяют сформировать первичную приборную информацию. Причем эти измерения подчиняются условию пространственно-временной синхронизации за счет эффекта вращения РБГ.
Обработка по специальным алгоритмам A комплексной многомерной приборной информации, на основе которой можно сформировать вектор x, дает возможность получить на выходе расширенную (траекторную, навигационную и позиционную) информацию, выражаемую с помощью вектора y:
| (20) |
причем
| (21) |
| (22) |
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() – углы курса и тангажа РБГ и их производные;
– углы курса и тангажа РБГ и их производные; ![]() ,
, ![]() – оценки скорости и продольного ускорения РБГ;
– оценки скорости и продольного ускорения РБГ; ![]() ,
, ![]() ,
, ![]() – оценки транспонированных векторов g, Дa, щдр.
– оценки транспонированных векторов g, Дa, щдр.
Преобразования (20) по алгоритмам A (в настоящей статье алгоритмы не приводятся) вектора x в вектор y позволяют получить выходную информацию в условиях ее функциональной избыточности и в режиме самотестирования блоков ТБМ, ТБА, ТБГ за счет текущего уточнения оценок векторов смещений их нулевых сигналов (![]() ,
,![]() ).
).
Работа каналов оптического и геомагнитного самонаведения (ОСН и ГМСН) обеспечивает режим комбинированного самонаведения РБГ на точечные цели. Причем каналы ГМСН и ОСН работают не в противоречии друг с другом, а в режиме поддержки одного канала (ОСН) другим каналом (ГМСН). Взаимодействие между каналами ГМСН и ОСН основано на принципе поэтапной работы (эстафеты): канал ГМСН обеспечивает дальнее наведение РБГ (а именно приведение боеголовки в район цели), а канал ОСН реализует непосредственно режим самонаведения на цель в условиях прямой видимости. Отличительные особенности работы каналов ГМСН и ОСН по физическим и техническим признакам показаны в табл. 2, 3.
Сравнительный анализ каналов показывает, что способ ГМСН имеет существенные преимущества перед способом ОСН по физическим (условиям самонаведения) и техническим (по дальности, помехозащищенности, эксплуатационным ограничениям) признакам.
Таблица 2
Каналы геомагнитного и оптического самонаведения РБГ
(сравнение по физическим признакам)
Физические показатели сравнения каналов | Канал геомагнитного самонаведения (ГМСН) | Канал оптического самонаведения (ОСН) |
Условия самонаведения | Дальнее самонаведение (наведение в условиях отсутствия прямой видимости целей) | Ближнее самонаведение (наведение в условиях прямой видимости целей) |
Носители сигналов | Магнитные сигналы о векторе T | Оптические сигналы (свет, ИК, УФ от цели) |
Условия воспроизведения линии визирования (ЛВ) | Косвенные условия (виртуальное воспроизведение ЛВ методом математического моделирования) | Прямые условия (реальное воспроизведение ЛВ в виде оптического луча) |
Принципы самонаведения | Косвенное самонаведение путем совмещения вектора скорости v с магнитной ЛВ | Прямое самонаведение путем совмещения продольной оси X РБГ с оптической ЛВ |
Координаты каналов самонаведения | Углы магнитного визирования (магнитный пеленг шц и магнитный зенитный угол иц цели в сопровождающем ортодромическом трехграннике) | Углы оптического визирования (углы фазирования (ц) и визирования (бц;вц;уц) цели в связанном трехграннике |
Таблица 3

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
