

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Каналы геомагнитного и оптического самонаведения РБГ
(сравнение по техническим признакам)
Технические показатели сравнения каналов | Канал геомагнитного самонаведения (ГМСН) | Канал оптического самонаведения (ОСН) |
Датчики первичной информации | Магниточувствительные датчики (магнитометры) | Опто-электронные преобразователи (ОЭП) |
Измерительные блоки | Трехосный блок магнитометров (ТБМ) | Оптический координатор цели (оптическая головка самонаведения) |
Ограничения на работу каналов СН: | ||
– по излучательной способности целей | Отсутствуют (цели могут не излучать физических полей) | Имеются (интенсивность излученной энергии оптических лучей I≥Iдоп при l≥lmin) |
– по состоянию атмосферы (среды) | Отсутствуют, т. к. канал ГМСН работает в любой среде (атмосфере, воде, земле) | Имеются (канал ОСН чувствителен к оптической прозрачности среды) |
– по помехозащищенности | Помехозащищен | Помехонезащищен |
Окончание табл. 3 | ||
Технические показатели сравнения каналов | Канал геомагнитного самонаведения (ГМСН) | Канал оптического самонаведения (ОСН) |
– по дальности действия | В пределах околоземного пространства дальность не ограничена | Дальность действия ограничена пороговой чувствительностью ОЭП, условиями прямой видимости и прозрачности среды |
– по вероятности обнаружения скрытых целей (в шахтах, тоннелях, бункерах, ангарах и пр.) | Возможно ГМСН РБГ на скрытые (под водой, землей и препятствиями) цели независимо от условий скрытости и невидимости цели | Возможность ОСН РБГ на скрытые (невидимые) цели практически отсутствует |
Кроме того, следует иметь в виду, что канал ГМСН не нуждается в обеспечении многодиапазонных измерений магнитного поля Земли, тогда как канал пассивного ОСН требует обеспечения широкодиапазонной чувствительности ОЭП к интенсивности излучения целями в оптическом луче энергии в разных частотных диапазонах (инфракрасном (ИК), световом и ультрафиолетовом (УФ)).
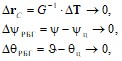
Алгоритм ГМСН сводится к вычислениям вектора корреляции ДrC углов ориентации вектора скорости v ГБГ ш, ![]() (с помощью МИМ) и углов магнитного визирования цели шц, иц (по сигналам ТБМ) с последующим управлением вектором скорости v боеголовки в соответствии с условием сведения к нулю ошибок ГМСН (ДrC, ДшРБГ, ДиРБГ):
(с помощью МИМ) и углов магнитного визирования цели шц, иц (по сигналам ТБМ) с последующим управлением вектором скорости v боеголовки в соответствии с условием сведения к нулю ошибок ГМСН (ДrC, ДшРБГ, ДиРБГ):
| (23) |
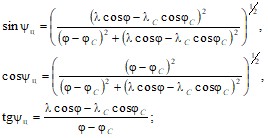
причем углы магнитного визирования цели шц, иц в горизонтальной и вертикальной плоскостях, проходящих через центр масс РБГ, вычисляются исходя из геометрических соображений:
– в горизонтальной плоскости
| (24) |
– в вертикальной плоскости
| (25) |
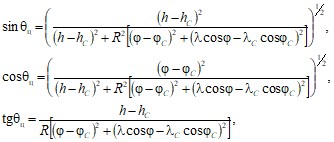
где R – средний радиус Земли, R = 6371,302 км; h, hC – высоты текущей точки местоположения РБГ и цели (по модели WGS-84) [30].
Текущие географические координаты РБГ (ц, л, h) определяют с использованием показаний ТБМ по алгоритмам ДГМН или с помощью спутниковой навигационной системы.
Особенности реализации метода комбинированного самонаведения РБГ на точечные цели заключаются в следующем:
- возможность выполнения оперативного расчета полетного задания (ОРПЗ) всех РБГ, находящихся в кассете последней ступени МБР, до их разделения на основе данных разведки или на основе оперативной информации о целях, получаемой с помощью бортовых средств наблюдения; возможность обеспечения одновременного запуска всех РБГ по распределенным в соответствии с ОРПЗ точечным целям без построения боевого порядка с последовательным подавлением целей [20]; возможность использования дифференциально-геометрического метода навигации РБГ в процессе самонаведения [31, 32] с целью выполнения маневрирования (
Работоспособность отдельных алгоритмов автономных навигации, ориентации и наведения объекта (в частности, алгоритмов ДГМН) проверена и подтверждена путем проведения натурных лабораторных и полевых испытаний, а также результатами компьютерного эксперимента на основе метода математического моделирования баллистической магнитометрии [33].
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
, , Яроцкий магнитометрия. СПб. : Наука, 2002. 228 с. , , Чигин навигации по геофизическим полям. М. : Наука, 1985. 328 с. , , Каюшкина и перспективы развития прецизионной магнитометрии // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2013. Вып. 15 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. С. 93–103. , Проскуряков : Алгоритмы, методики калибровки блоков магнитометров. Саратов : Изд-во Сарат. ун-та, 2014. 152 с. Проскуряков алгоритмы бортовой магнито-гравиметрии // Гироскопия и навигация. 1995. № 1 (8). С. 72–73. Силкин и анализ алгоритмов определения пространственной ориентации беспилотной аэродинамической платформы по измерениям магнитного поля Земли : дис. … канд. техн. наук. М., 2002. 280 с. , , Августов и наведение по пространственным геофизическим полям // Изв. ЮФУ. Технические науки. 2013. № 3 (140). С. 74–84. , , Малютин ориентации подвижного объекта по показаниям магнитных датчиков // Датчики и системы. 2009. № 5. С. 51–54. , , Солопов -инерциальный модуль для новых применений // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2016. Вып. 20 : Теоретические и экспериментальные исследования, компьютерные технологии. Методические аспекты физического образования. Экономика в промышленности. С. 4–12. , , Маслов система ориентации вращающихся подвижных объектов (хронометрический способ автономной ориентации) // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2015. Вып. 18 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. Экономика в промышленности. С. 53–62. , , Маслов система ориентации вращающихся подвижных объектов (гармонический способ автономной ориентации) // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2015. Вып. 18 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. Экономика в промышленности. С. 81–88. , , Маслов курсовертикаль для квазистационарных объектов // Гетеромагнитная микро - и наноэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2014. Вып. 16 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. Экономика в промышленности. С. 64–74. , , Васильев работы миниатюрной системы ориентации вращающихся подвижных объектов // Гетеромагнитная микро - и наноэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2014. Вып. 16 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. Экономика в промышленности. С. 78–91. Бабаев , демпфирование и стабилизация бортовых оптических приборов. Л. : Машиностроение, 1984. 232 с. , , Ляшенко геомагнитная навигация подвижных объектов // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2016. Вып. 20 : Теоретические и экспериментальные исследования, компьютерные технологии. Методические аспекты физического образования. Экономика в промышленности. С. 13–22. , , Спиридонов обеспечение магнито-инерциального модуля // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2016. Вып. 21 : Теоретические и экспериментальные исследования, компьютерные технологии. Методические аспекты физического образования. Экономика в промышленности. С. 4–19. , , Спиридонов калибровки блока магнитометров (алгоритмы, методика, технологии) // Гетеромагнитная микроэлектроника : сб. науч. тр. Саратов : Изд-во Сарат. ун-та, 2013. Вып. 15 : Гетеромагнитная микро - и наноэлектроника. Методические аспекты физического образования. С. 115–130. , Хлебников ракет. М. : Воениздат, 1975. 216 с. Ефимов баллистических ракет. М. : Воениздат, 1968. 120 с. , , Мохоров межконтинентальных баллистических ракет. М. : Машиностроение, 1996. 304 с. , Лысенко и навигация космических аппаратов. М. : Дрофа, 2004. 544 с. Сихарулидзе летательных аппаратов. М. : Наука, 1982. 352 с. , Распопов построения бесплатформенных инерциальных навигационных систем. СПб. : ГНЦ РФ ЦНИИ "Электроприбор"», 2009. 280 с. , Крылов ориентации метеорологических спутников. Л. : Гидрометеорологическое изд-во, 1968. 212 с. , , Черноморский системы : учеб. пособие для авиационных вузов / под ред. . М. : Машиностроение, 1983. 319 с. Розенцвейн состояние скважинных гироскопических навигационных систем // Применение гравиинерциальных технологий в геофизике : сб. ст. и докл. СПб. : ГНЦ РФ ЦНИИ "Электроприбор"», 2002. С. 146–167. Пат. 2523753 Российская Федерация, МПК G01C21/00. Способ персональной автономной навигации / заявители , ; патентообладатель ФГБОУ ВПО «СГТУ имени » – № 000A ; заявл. 09.01.2013 ; опубл. 20.07.2014. , , Астахов модели неоднородного магнитного поля Земли в околоземном пространстве // Тр. / Военно-космическая академия им. . 2014. № 000. С. 147–152. ГОСТ 25645.126-85. Поле геомагнитное. Модель поля внутриземных источников. М. : Изд-во стандартов, 1985. 22 с. Руководство по Всемирной геодезической системе – 1984 (WGS-84). URL : http://www. /icaodocs/Docs/ICAO_Doc9674.pdf (дата обращения : 24.09.2016). Громов -геометрический метод навигации. М. : Радио и связь, 1986. 384с. Гулько метод в исследовании динамики управляемого полета. Саратов : Высш. командно-инж. училице ракетных войск, 1967. 211 с. , , Попеленский измерений векторного магнитометра и глобальных моделей магнитного поля Земли для коррекции БИНС летательного аппарата // XXIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. СПб. : ГНЦ РФ АО «Концерн ЦНИИ «Электроприбор», 2016. С. 340–344.
МЕТОДИЧЕСКИЕ АСПЕКТЫ ФИЗИЧЕСКОГО ОБРАЗОВАНИЯ

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
