

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В статье обосновывается возможность эффективного решения комплекса задач совершенствования СОН БА за счет организации и использования магнитометрического канала измерений, а также практической целесообразности реализации предлагаемого пути применительно к конкретным задачам управления БА.
Для конкретности в настоящей статье рассматриваются вопросы перспективного усовершенствования решения задач автономного управления БА на всех этапах жизненного цикла применительно к межконтинентальным баллистическим ракетам (МБР) с использованием ПСОН. Вместе с тем большинство практических приложений предлагаемого магнитометрического канала измерений достаточно легко и эффективно могут быть реализованы применительно к любым объектам ракетно-космической техники (МБР, РН, КА).
Для повышения эффективности работы ПСОН на МБР с учетом требований необходимого улучшения основных технико-эксплуатационно-экономических показателей (точности, надежности, автономности, экономичности, отказоустойчивости, технологичности, самопроверяемости, контролепригодности, живучести) предлагается на базе штатной ПСОН построить комбинированную СОН (КСОН) путем включения в ее состав магнитометрического канала измерений [1–8].
За счет включения магнитометрического канала измерений в состав ПСОН предполагается достижение реализации основных принципов усовершенствования системы:
- расширение информации и формирование функционально избыточной информации; алгоритмическая (многоальтернативная, многофункциональная, многорежимная) обработка расширенной информации.
Конструктивно магнитометрический канал измерений реализуется на основе использования магнитоинерциального модуля (МИМ) [9], представляющего собой малогабаритную измерительно-вычислительную систему (m ≈ 0,2 кг). В состав измерительной части МИМ входят, в первую очередь, три базовых трехосных блока магнитометров (ТБМ), акселерометров (ТБА), гироскопов (ТБГ), а в состав вычислительной части модуля – многоканальный аналого-цифровой преобразователь (АЦП) и микроконтроллер (МК).
Функционально МИМ построен по принципу реконфигурации программ и алгоритмов обработки многомерной магнитоинерциальной информации, при котором аппаратная часть модуля остается неизменной, а достижение модулем или всей системой тех или иных функций обеспечивается за счет сменного программно-алгоритмического обеспечения (ПАО).
Структурно с помощью МИМ реализуется несколько измерительно-вычислительных каналов: магнитометрический, акселерометрический, гироскопический (тахометрический), хронометрический.
Магнитоинерциальная информация, формируемая в соответствующем канале измерений, попадает в МК модуля, в котором она подлежит программно-алгоритмической обработке в соответствии с целевыми функциями [1–15]. Девятимерный вектор u (9Ч1) выходных сигналов МИМ формируется на основе объединения трех векторов (3Ч1) показаний блоков: uм (ТБМ), uа (ТБА) и uг (ТБГ) [16, 17]. Блоки ТБМ, ТБА, ТБГ модуля измеряют соответственно компоненты векторов напряженности результирующего магнитного поля (Tm), кажущегося ускорения (nm) и абсолютной угловой скорости вращения основания (щm) в связанном с корпусом МБР трехграннике ![]() .
.
Введем в рассмотрение граф преобразований систем координат (рис. 1), используемый в дальнейшем при решении конкретных задач автономной ориентации, навигации и наведения МБР с помощью КСОН (ПСОН+МИМ). Приведем обозначения, принятые на рис. 1: Ц, Ш0 – программный (расчетный) и фактический уголы азимутального прицеливания (АП) МБР на старте; ДШ – ошибка АП МБР; ![]() , ш0 – угол тангажа и угол рыскания МБР на стартовом столе перед пуском; б0, в0, у0 – углы поворота гиростабилизированной платформы (ГСП) относительно корпуса МБР (m) перед стартом в режиме автономной начальной выставки (АНВ); с0, з0, е0 – углы ориентации ГСП относительно географического трехгранника q в точке старта в режиме АНВ; б, в, у, с, з, е – углы ориентации ГСП относительно связанного (m) и географического (q) трехгранников в рабочем режиме автономного полета ракеты; Ш,
, ш0 – угол тангажа и угол рыскания МБР на стартовом столе перед пуском; б0, в0, у0 – углы поворота гиростабилизированной платформы (ГСП) относительно корпуса МБР (m) перед стартом в режиме автономной начальной выставки (АНВ); с0, з0, е0 – углы ориентации ГСП относительно географического трехгранника q в точке старта в режиме АНВ; б, в, у, с, з, е – углы ориентации ГСП относительно связанного (m) и географического (q) трехгранников в рабочем режиме автономного полета ракеты; Ш, ![]() , г – углы ориентации корпуса МБР (m) относительно географического терхгранника (q) в рабочем режиме;
, г – углы ориентации корпуса МБР (m) относительно географического терхгранника (q) в рабочем режиме; ![]() , ш, г – углы ориентации корпуса МБР (m) относительно стартового трехгранника (s) в рабочем режиме; A0, B0, D0, P0 – соответствующие матрицы ориентации трехгранников в режиме АНВ; A, B, C, D, P – соответствующие матрицы ориентации трехгранников в рабочем режиме; ep, em, eq – единичный вектор, нормальный к базовой плоскости YПZП ГСП, отнесенный к трехгранникам p, m и q соответственно; T, g, Щ – векторы напряженности результирующего магнитного поля, ускорения свободного падения тел и угловой скорости вращения Земли, отнесенные к осям соответствующего трехгранника (p, q или m).
, ш, г – углы ориентации корпуса МБР (m) относительно стартового трехгранника (s) в рабочем режиме; A0, B0, D0, P0 – соответствующие матрицы ориентации трехгранников в режиме АНВ; A, B, C, D, P – соответствующие матрицы ориентации трехгранников в рабочем режиме; ep, em, eq – единичный вектор, нормальный к базовой плоскости YПZП ГСП, отнесенный к трехгранникам p, m и q соответственно; T, g, Щ – векторы напряженности результирующего магнитного поля, ускорения свободного падения тел и угловой скорости вращения Земли, отнесенные к осям соответствующего трехгранника (p, q или m).

Обозначения и названия базовых трехгранников (систем координат), используемые в дальнейшем при решении задач автономного управления МБР, даны в табл. 1.
Таблица 1
Трехгранники (системы координат)
Трехгранник | Моделируемая система координат | ||
Обозначение | Название | Обозначение | Название |
q | Географический | NHE | Географическая: N – направлена на север, H – вертикаль места, E – направлена на восток |
s | Стартовый | XCYCZC | Стартовая (ортодромическая): XC – направлена на цель, YC – стартовая вертикаль, ZC – нормаль к ортодромии |
m | Связанный | XYZ | Связанная: X – продольная ось, Y – нормальная ось, Z – поперечная ось |
p | Платформенный | XПYПZП | Платформенная: XП – ось вращения (B), YП – ось рыскания (P), ZП – ось тангажа (T) |
Схема трехосного гиростабилизатора с гиростабилизированной платформой представлена на рис. 2.
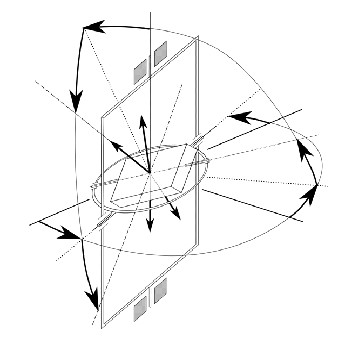

Рис. 2. Схема подвеса ГСП и преобразования координат
Из анализа рис. 1, 2 видно, что при измерении векторов e, T, n, щ и других можно аналитическим путем на основе алгоритмической обработки многомерной информации получить дополнительную информацию о ненаблюдаемых углах ориентации трехгранников q, s, p, m относительно друг друга, причем как в режиме предстартовой подготовки, так и в рабочих режимах.
С учетом предварительно проводимых операций технологических и объектовых калибровок блоков модуля первичные показания блоков модуля (Tm, nm, щm) удается привести к редуцированным (нормированным) векторам (![]() ,
,![]() ,
,![]() ) соответствующим немагнитному ортонормированному основанию [16, 17]. Дальнейшая алгоритмическая обработка многомерной информации (
) соответствующим немагнитному ортонормированному основанию [16, 17]. Дальнейшая алгоритмическая обработка многомерной информации (![]() ,
,![]() ,
,![]() ) позволяет решить комплекс задач управления МБР на этапах предстартовой подготовки, автономной ориентации и навигации ракеты на баллистической траектории и заключительном этапе разделения боеголовок (РБГ) для наведения их на точечные цели.
) позволяет решить комплекс задач управления МБР на этапах предстартовой подготовки, автономной ориентации и навигации ракеты на баллистической траектории и заключительном этапе разделения боеголовок (РБГ) для наведения их на точечные цели.
В частности, в режиме предстартовой подготовки МБР к пуску на основе оценки измеренных с помощью МИМ векторов (Tm, nm, щm) и приведенных к ортонормированному основанию (![]() ,
,![]() ,
,![]() ) возможно вычисление направляющих косинусов
) возможно вычисление направляющих косинусов ![]() матрицы D0, характеризующих начальную ориентацию МБР (см. рис. 1):
матрицы D0, характеризующих начальную ориентацию МБР (см. рис. 1):
| (1) |
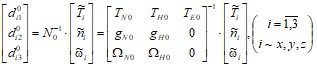 ,
,где TN0, TH0, TE0, gN0, gH0, ЩN0, ЩH0 – значения компонент векторов ![]() , gq, Щq в географическом трехграннике q в предстартовых условиях;
, gq, Щq в географическом трехграннике q в предстартовых условиях; ![]() ,
,![]() ,
,![]() – проекции редуцированных векторов (
– проекции редуцированных векторов (![]() ,
,![]() ,
,![]() ) на i-е оси (X, Y, Z).
) на i-е оси (X, Y, Z).
По значениям ![]() можно вычислить углы Ш0,
можно вычислить углы Ш0, ![]() , ш0 начальной ориентации МБР относительно географического трехгранника
, ш0 начальной ориентации МБР относительно географического трехгранника ![]() в условиях функциональной избыточности информации.
в условиях функциональной избыточности информации.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
