

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для винторезной цепи условие функционального согласования перемещений ее конечных звеньев устанавливается из соображения, что в процессе формообразования резьбы заготовка и резец образуют пару, имитирующую в своем относительном движении пару винт-гайка, и поэтому нарезание на заготовке однозаходной резьбы с конкретным шагом Р мм возможно тогда, когда за один оборот заготовки фасонный резец переместится вдоль оси заготовки на величину, равную шагу однозаходной нарезаемой резьбы, т. е. на Р мм. Сформулированное функциональное условие согласования перемещений конечных звеньев винторезной цепи можно выразить короче следующей условной формой записи:
1 об. заг. ↔ Р мм прод. перем. резца,
где «↔» – знак, заменяющий слова «должен соответствовать», а сама запись читается как «один оборот заготовки должен соответствовать Р миллиметров продольного перемещения резца».
Теперь с учетом составленного условия кинематического согласования перемещений конечных звеньев винторезной цепи можно в общем виде составить уравнение ее кинематического баланса:
1 об. заг. i1 i2... iвинт... iп Рхв = Р,
где i1 i2..., iп – передаточные отношения всех п постоянных передач винторезной цепи конкретного станка за исключением передачи ходовой винт-гайка, iвинт – передаточное отношение винторезной гитары, Рхв – шаг передачи ходовой винт-гайка станка.
Решая составленное уравнение кинематического баланса, получают формулу настройки винторезной цепи, с помощью которой определяют величину передаточного отношения винторезной гитары iвинт, обеспечивающую требуемое условие согласования:
![]()
где Свинт – постоянный коэффициент винторезной цепи станка.
Для скоростной цепи условие согласования скоростей ее конечных звеньев устанавливается из требования обеспечения одному конечному звену цепи – шпинделю с заготовкой в соответствии с расчетной оптимальной скоростью нарезания конкретной резьбы необходимой частоты вращения n3 при заданном исходном значении частоты вращения пм другого конечного звена цепи – ротора приводного электродвигателя. Исходя из этого, условие согласования скоростей конечных звеньев скоростной цепи можно сформулировать так: при заданной частоте вращения пм приводного электродвигателя заготовка должна иметь требуемую частоту вращения п3, что можно выразить короче следующей условной формой записи:
nм (мин-1) эл-ля М → п3 (мин-1) заг,
где «→» – знак, заменяющий слова «следует преобразовать в», а сама запись читается как «пм-ю частоту вращения ротора электродвигателя М следует преобразовать в п3-ю частоту вращения заготовки».
Теперь с учетом составленного условия согласования (преобразования) скоростей конечных звеньев скоростной цепи можно в общем виде составить уравнение ее кинематического баланса:
пм i1... iv... iп = п3,
где i1... iv... iп – передаточные отношения всех п постоянных передач в скоростной цепи, iv – общее передаточное отношение коробки скоростей.
Решая составленное уравнение кинематического баланса, получают формулу настройки скоростной цепи, с помощью которой определяют величину общего передаточного отношения iv коробки скоростей, обеспечивающего требуемую частоту вращения п3 шпинделя станка с заготовкой:
![]()
где Сv – постоянный коэффициент скоростной цепи станка.
Для станков с ЧПУ, у которых рабочие исполнительные органы имеют индивидуальные регулируемые по скорости и направлению двигатели, кинематическая настройка станка сводится к подготовке управляющей программы, закодированной на программоносителе для обеспечения исполнительными органами требуемых величин скоростей или перемещений. Для сложных кинематических групп обеспечиваются и поддерживаются необходимые функциональные соотношения величин скоростей исполнительных органов, т. е. передаточных отношений функциональных кинематических цепей. Устройство ЧПУ станка при формообразовании с его помощью сложных поверхностей, как, например, при изготовлении поверхностей у штампов, матриц, пресс-форм или при обтачивании фасонных тел вращения сложной конфигурации и т. п., обеспечивает непрерывное изменение передаточных отношений функциональных цепей станка в соответствии с требуемым законом их изменения согласно управляющей программы.
3.4 Основные передачи и механизмы кинематических цепей
3.4.1 Зубчатые механизмы приводов движения резания и подачи
Передаточные механизмы размещаются между источником движения (двигателем) и исполнительным узлом станка (столом, шпинделем и т. п.), которому они передают движение, но и изменяют его угловую скорость. Передаточные механизмы станка включают в себя, кроме того, устройства, преобразующие вращательное движение в поступательное и наоборот, а также изменяющие направление движения, т. е. осуществляющие реверсирование.
Коробки скоростей в приводах движения резания выполняют, прежде всего, роль редуктора, обычно снижающего частоту вращения двигателя до необходимой в данных условиях резания (с учётом материала инструмента и заготовки, условий обработки, точности и т. п.). Коробка скоростей состоит из ряда элементарных передач между валами, размещёнными в корпусе (бабке). Имеются конструкции коробок, в которых между двумя валами осуществляется всего один вариант передачи движения, два, три варианта и более.
Рис.3.9 Примеры зубчатых передачи в приводах движения резания
Один вариант передачи между валами может осуществляться постоянно установленными зубчатыми колёсами (рис. 3.9,а) или сменными (рис. 3.9,б). При передаче движения с вала I на вал II вращение последнего будет замедлятся или ускоряться в зависимости от отношения чисел зубьев колёс:


Постоянное отношение iс<1 будет означать, что угловая скорость вала II меньше угловой скорости ведущего вала I. При iс >1 вал II будет вращаться с большой частотой, чем вал I. Такая же картина будет и при переменном отношении iv числа зубьев колёс. Если межосевое расстояние А (рис. 3.9,б) не изменяется, то сумма za+zb должна быть постоянной.
Поместив по два зубчатых колеса на ведущем и ведомом валах и обеспечив попеременное включение на валу I левого или правого колеса перемещением блока колёс z2 – z4 (рис. 3.9, в) или включением двухсторонней зубчатой муфты (рис. 3.9, г), получим


Элементарные механизмы, позволяющие изменять передаточные отношения кинематических цепей, называют множительными механизмами. Кроме рассмотренных на рисунке 3.9 показаны множительные механизмы на три (рис. 3.9, д) и четыре (рис. 3.9, е) скорости:




Передвижные блоки колёс обычно имеют два или три зубчатых венца; четырёхвенцовые блоки встречаются редко.
Между электродвигателем и коробкой скоростей часто размещают множительные механизмы из ременных передач (с плоским, клиновидным или зубчатым ремнём), известные из курса «Детали машин».
Рассмотренные зубчатые механизмы приводов движения резания могут использоваться и в приводах движения подачи. Однако для последних применяют и специфические множительные зубчатые механизмы: механизм Нортона или механизм с накидкой шестерней, механизм меандр, механизм с вытяжной шпонкой.
Механизм Нортона имеет насаженный на вал зубчатый «конус», представляющий собой блок зубчатых колёс разного диаметра (рис. 3.10, а). С одним из колёс конуса путём поворота относительно вала I может входить в зацепление так называемая накидная шестерня ![]() , обеспечивая переменное отношение чисел зубьев колёс
, обеспечивая переменное отношение чисел зубьев колёс ![]() , где
, где ![]() – количество зубьев колеса конуса, с которым зацеплена шестерня
– количество зубьев колеса конуса, с которым зацеплена шестерня ![]() . Если число зубьев колёс меняется в арифметической прогрессии, то это удобно для получения частот вращения винторезной цепи станка. Число колёс конуса не превышает 12.
. Если число зубьев колёс меняется в арифметической прогрессии, то это удобно для получения частот вращения винторезной цепи станка. Число колёс конуса не превышает 12.
Механизм меандр (в древности – извилистая река в Азии) состоит из блоков колёс малого ![]() и большого
и большого ![]() диаметров (рис. 3.10,б), причём обычно
диаметров (рис. 3.10,б), причём обычно

Скользящая шестерня ![]() , сдвигаясь вправо, может иметь зацепление с тремя колёсами
, сдвигаясь вправо, может иметь зацепление с тремя колёсами ![]() , обеспечивая отношение чисел зубьев
, обеспечивая отношение чисел зубьев ![]() ,
,![]() и
и ![]() :
:
 ;
;  ;
; 
Иногда этот механизм называют механизмом геометрического ряда. Чаще всего φ = 2, тогда i1=1; ![]() ;
; ![]()
Рис. 3.10 Примеры зубчатых механизмов в приводах движения подачи.
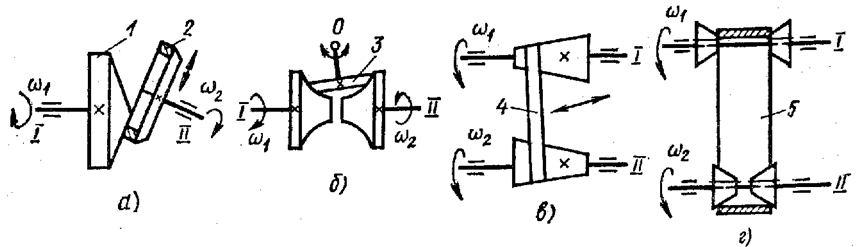
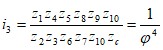
Рис. 3.11 Схемы механических вариаторов в приводе движения резания
Механизм с вытяжной шпонкой (рис. 3.10,в) позволяет осевым перемещением шпонки «брать» движение с любого колеса зубчатого конуса на валу I. Так, в положении, показанном на рисунке, отношение чисел зубьев колёс будет i=z1 / z2 .
Использование зубчатых механизмов с 3–5 сменными колёсами расширяет возможности изменения частоты вращения ведомого вала. Такие сменные колёса устанавливают на деталь, называемую гитарой (рис. 3.10,г), которая позволяет в определённых пределах менять диаметры промежуточных колёс передачи при постоянном положении осей ведущего входного и ведомого колёс механизма и, следовательно, получать различное отношение чисел зубьев колёс гитары ![]() :
:
![]() .
.
Механизмы с двумя сменными колёсами обычно применяют в цепях движения резания, а с 3–5 колёсами – в цепях движения подачи.
3.4.2 Механические вариаторы в приводе движения резания.
В станках, где целесообразно применение бесступенчатого регулирования механическим способом, используются так называемые вариаторы – устройства, создающие переменное передаточное число в некотором диапазоне. Основой таких вариаторов являются фрикционные, плоскоременные, клиноремённые и цепные передачи.
На рисунке 3.11,а показана фрикционная передача, в которой контактируют коническая поверхность диска 1 на валу I и торцовая поверхность диска 2 на валу II. Передаточное число зависит от радиусов, на которых расположены контактирующие элементы. Перемещая вал II параллельно самому себе вдоль образующей конуса, будем при постоянной угловой скорости ω2. Такая передача применяется в сверлильных настольных станках малой мощности.
Вариатор работает по схеме, показанной на рисунке 3.11,б. При постоянной ω1 изменение ω2 на валу II достигается поворотом ролика 3 относительно точки О. Подобная фрикционная торовая передача применяется в станках токарного типа.
Схема плоскоременной передачи между двумя конусами показана на рисунке 3.11,в. Перемещая плоский ремень 4 вдоль образующей конусов при постоянной ω1 , получим переменную ω2 на валу II.
Передача с синхронно раздвигающимися конусами на ведущем валу I и сдвигающимися – на ведомом валу II (рис. 3.11,г) позволяет при постоянной ω1 получить переменную угловую скорость ω2. Здесь движение между парами конусов на валах передаётся цепью, металлическим кольцом или клиновым ремнём 5.
3.4.3 Реверсирующие передаточные механизмы в приводе станка
В процессе работы на станке может появиться необходимость изменения направления угловой скорости того или иного звена, т. е. его реверса. С этой целью в кинематическую цепь вводят реверсирующие передаточные механизмы. Идея реверсирования реализуется или введением в цепь дополнительного зубчатого колеса или присоединением ведомого колеса к двум диаметрально противоположным точкам ведущего колеса.
На рисунке 3.12,а показано, что с вала I на вал II движение передаётся через два или три колеса. Выбор одного или другого варианта осуществляется двусторонней фрикционной муфтой на валу II.
Реверсирующий механизм с широким цилиндрическим колесом, показанный на рисунке 3.12,б, состоит из трёх валов расположенных так, что колесо на валу II может зацепляться или с широким колесом на валу I, или, как это показано на рисунке, с колесом на валу III.
Передаточный реверсирующий механизм с коническими колёсами (рис. 3.12,в) включает два колеса, свободно сидящие на валу II и соединённые с ним двусторонней фрикционной муфтой. Эти колёса постоянно находятся в зацеплении с колесом на ведущем валу I и вращаются в разных направлениях. Выбор направления производится включением муфты влево или вправо.
Рис. 3.12 Схемы реверсирующих механизмов: а – с двусторонней муфтой; б – с подвижной шестерней; в – с коническими колёсами

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
