

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Раздел 3
3.1 Кинематическая структура станков
3.1.1 Механические и немеханические связи в станках
Любое исполнительное движение в станках создается и реализуется с помощью кинематической группы, включающей в себя один или несколько исполнительных органов, один или несколько источников движения и пространственно-кинематические связи между ними, обеспечивающие требуемые параметры создаваемого группой движения. При нерегулируемом источнике движения, как правило, кинематическая группа содержит также механические устройства для регулирования и настройки параметров создаваемого ею движения, называемые органами настройки. Наименование кинематической группы аналогично названию реализуемого ею исполнительного движения. Например, группу, создающую формообразующее движение, называют формообразующей группой и т. п.
Структура кинематической группы может быть разнообразной и зависит от характера осуществляемого движения, числа исполнительных органов, вида источника (источников) движения, потребности в регулировании параметров создаваемого группой движения, а также системы управления станком.
Под исполнительными органами понимают подвижные конечные звенья кинематической группы, которые непосредственно участвуют в образовании траектории исполнительного движения. Среди исполнительных органов выделяют органы, осуществляющие абсолютное или относительное движение заготовки или режущего инструмента непосредственно в процессе формообразования поверхности, и называют их рабочими. Например, рабочими органами являются такие звенья станка, как стол, шпиндель, суппорт, ползун и т. п.
В большинстве случаев исполнительные органы в станках совершают вращательное или прямолинейное движение, т. е. они являются подвижными звеньями вращательной или поступательной кинематической пары (рис. 3.1), называемой исполнительной.
В зависимости от числа исполнительных органов кинематические группы делятся на простые и сложные. Простые группы имеют только один исполнительный орган, а сложные – два и более исполнительных органов.
Под пространственно-кинематической связью в станках понимают такое состояние (или связь) между двумя любыми его звеньями, в том числе и исполнительными органами, которое накладывает на них определенные ограничения, не позволяющие им относительно друг друга занимать в пространстве произвольные положения и иметь произвольные скорости.
Пространственно-кинематические связи в станках между исполнительными органами, а также между ними и источниками движения осуществляются через кинематические цепи и каналы связи, реализуемые с помощью механических и немеханических средств. Поэтому пространственно-кинематические связи подразделяют по характеру средств их реализации на два вида – механические и немеханические.
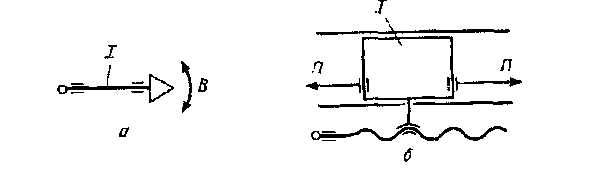
Рис.3.1 Исполнительные кинематические пары: а – вращательная; б – поступательная
Механические связи и цепи реализуется в станках с помощью механических звеньев, передач, устройств и механизмов, а немеханические – с помощью гидро - пневматических, электрических и электронных средств и каналов связи, включая устройства по сбору, приему, обработке и выдаче разнообразной информации и каналы ее передачи.
В современных станках и, особенно, в станках с ЧПУ широко применяются комбинированные (смешанные) связи, состоящие из участков механических и немеханических связей, причем участки механической связи, как правило, служат для передачи управляемой энергии от источника движения к исполнительным органам, а участки немеханической связи – для передачи управляющей информации от устройства управления (например, УЧПУ) к управляемому источнику движения, а также для передачи информации от датчиков обратных связей к устройству управления.
Структурно пространственно-кинематические связи кинематической группы подразделяют по функциональному назначению на внутреннюю и внешнюю структурные связи
Под внутренней структурной связью (в дальнейшем называемой просто внутренней связью) кинематической группы понимают совокупность всех звеньев кинематических пар и устройств в группе, обеспечивающую качественную характеристику создаваемого группой движения, т. е. условия получения движения с необходимой траекторией и требуемой точностью ее формы. Под внешней структурной связью кинематической группы понимают совокупность всех звеньев, кинематических пар, устройств и источников движения в группе, обеспечивающую количественные характеристики движения, т. е. такие его параметры, как скорость и направление, а в некоторых случаях путь (протяженность траектории) и исходную точку (начало протяженности траектории).
Внутренняя структурная связь кинематической группы в станках реализуется по-разному и это зависит от многих факторов, среди которых в первую очередь выступают число исполнительных органов в группе и требуемая точность формы траектории движения. В простых кинематических группах с одним исполнительным органом внутренняя связь реализуется пространственной связью двух соприкасающихся звеньев исполнительной кинематической пары, одним из которых является сам исполнительный орган 1 группы, т. е. шпиндель, стол (рис. 3.1, а), ползун, суппорт (рис. 3.1, б) и т. д.
В сложных кинематических группах с двумя и более исполнительными органами и соответствующими им исполнительными кинематическими парами внутренняя структурная связь реализуется не только пространственными связями этих пар, но и пространственно-кинематическими связями в виде кинематических цепей (каналов связи) между исполнительными органами группы. Кинематические цепи, связывающие между собой исполнительные органы в сложных кинематических группах, называют функциональными (внутренними) цепями. Они предназначены для обеспечения строгой функциональной согласованности перемещений и скоростей исполнительных органов группы. Суммарное число функциональных цепей в сложной группе не должно быть меньше, чем на единицу суммарного числа ее исполнительных органов. Например (рис. 3.2,а), группа, реализующая сложное движение (В1, В2) и имеющая два исполнительных органа I и II, должна содержать в своей структуре, как минимум, одну функциональную внутреннюю цепь 1(I)-4-2(II) между исполнительными органами. В группе, реализующей сложное движение (В1, В2, П3) с участием трех исполнительных органов I, II и III (рис. 3.2,б), для обеспечения функциональной согласованности перемещений и скоростей между ее исполнительными органами достаточно внутреннюю структурную связь этой группы реализовать в виде двух функциональных цепей, например, 1 (I)-5-2 (II) и 2 (II)-5-3-4 (III) или же какого-нибудь другого их сочетания. (На структурных кинематических схемах кинематические цепи с механическими звеньями обозначены одинарной штриховой линией, а немеханические участки цепей – двумя штриховыми линиями.)
Внешняя структурная связь кинематических групп в большинстве случаев реализуется пространственно-кинематической связью в виде кинематической цепи или даже одного соединительного устройства или одной передачи, обеспечивающей передачу энергии от источника движения во внутреннюю связь группы. В простых кинематических группах (рис. 3.2,в) внешняя структурная связь реализуется в виде цепи 1(М)-2(I) между источником движения М и исполнительным органом I, а в сложных группах – в виде цепи между источником движения М и одним из звеньев внутренней структурной связи этой группы, например, 3(М)-4 на рис. 3.2,а или 4(М)-5 на рис. 3.2,б.
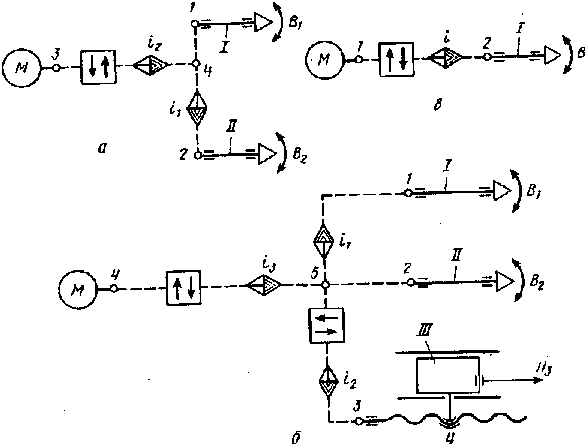
Рис. 3. 2 Структурные схемы кинематических групп: а – сложная с двумя исполнительными органами; б – сложная с тремя исполнительными органами; в – простая группа. Специальным ромбовидным знаком с буквой i обозначены органы настройки движения на такие параметры, как траектория, скорость и путь, а знаком ↓↑ – орган настройки на направление движения. Заштрихованная часть специального знака указывает на фактическое направление передачи энергии через орган настройки
В станках с ЧПУ структура кинематических групп существенным образом видоизменяется в силу применения в них регулируемых и управляемых по программе автономных источников движения на каждый рабочий исполнительный орган станка. Это позволило устранить из структуры станков с ЧПУ механические органы настройки их движений, значительно сократить протяженность механических цепей и их участков, а в ряде случаев вообще заменить механические связи на немеханические, что в совокупности привело к упрощению механической части структуры станков в целом. При этом следует особо подчеркнуть, что все видоизменения, связанные с преобразованием характера структурных связей в станках с ЧПУ, не изменяют сущности самих кинематических связей и условий необходимого кинематического согласования перемещений и скоростей между исполнительными органами станков.
Структура простых кинематических групп в станках с ЧПУ обусловлена типом источника движения и величиной его диапазона регулирования по скорости. Наипростейший и наиболее распространенной является структура, где источник движения с помощью соединительной муфты стыкуется непосредственно с исполнительным органом I (рис. 3.3,а) либо с ходовым винтом винтовой пары, гайка которой жестко связана с исполнительным органом II (рис. 3.3,б). Другой встречающийся в станках с ЧПУ вид простой кинематической группы отличается от простейшей наличием дополнительного участка механической связи между источником движения и исполнительным органом III (рис. 3.3,в). На этом участке располагается орган настройки iАКС на скорость в виде автоматизированной коробки скоростей (АКС) или редуктора для увеличения момента на выходном звене.

Рис.3.3 Структурные схемы кинематических групп в станках ЧПУ: а, б, в – простые группы; г – сложная группа на примере токарного станка

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
