

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2.1 Обратная связь
Обязательным взаимодействием в системах автоматического управления является обратная связь параметра характеризующего состояние элемента (выходной параметр элемента) и исполнительным механизмом, действующим на данный объект. Такая идея была сознательно сформулирована в 19 веке на основании обобщения ряда технических решений реализованных в процессе промышленной революции. Новизна заключалась в идее рассматривать объект управления и обратную связь как единую систему. Такая система имеет другие свойства, чем сам объект регулирования.
Обратная связь может быть положительной и отрицательной. При положительной связи значение выходного параметра накладывается на задание. При отрицательной обратной связи задание сравнивается (вычитание) со значением выходного параметра. Отрицательная связь позволяет создавать устойчивые системы.
После формулировки основополагающего решения заключающего в использование обратной связи по измеряемым выходным параметрам был определен математический принцип использования этой связи. Он гласит, что для регулирования технологического параметра требуется величину управляющего сигнала рассчитывать и устанавливать пропорционально величине изменения регулируемого выходного параметра. Применение этих простых и понятных вызвало революцию в управлении технологическими процессами.
Потребовался математический аппарат для однотипного описания свойств объектов управления, обратной связи и управляющих устройств. Такой математикой стали преобразования Лапласа. В свою очередь, частотная теория позволила разработать математические основы создания алгоритмов для модулей регулирования. Для реализации математических решений были разработаны аппаратные средства - регуляторы. Они показали высокую эффективность. Без них стало нельзя обходиться. В конкурентной борьбе аппаратные регуляторы помогали фирмам выигрывать. Автоматика стала наукой и модной дисциплиной.
Регуляторы работают по принципу отрицательной обратной связи. В сумматоре определяется величина рассогласования - отклонения. Изменение величины управляющего сигнала происходит на основании значения рассогласования по заложенным уравнениям.
Рис 2.1 Схема контура управления с обратной связью.
На рисунке Z – заданное значение технологического параметра, е – рассогласование, Р – регулирующий блок, U - сигнал на исполнительный механизм, f – внешние возмущения, ОУ – объект управления, Y – регулируемый параметр состояния объекта. Сумматор вычитает из задания сигнал обратной связи. Принцип функционирования регулирующей системы. В сумматоре постоянно происходит сравнение (вычитание) текущего значения регулируемой величины у с заданным значением Z, определяя отклонение е = z – у. Изменение управляющего сигнала на выходе регулятора зависит от изменения отклонения. Если текущее значение равно заданному значению, то регулятор не меняет управляющее воздействие (система работает в установившемся режиме). В противном случае управляющее воздействие на объект u изменяется в соответствии с величиной отклонения по алгоритмам, заложенным в регулятор. Чем больше отклонение регулирования (и дольше оно наблюдается), тем больше изменение управляющего воздействия и тем больше соответствующее изменение энергобаланса в объекте регулирования.
Классификация систем управленияСистемы управления используются и проектируются для неисчислимого разнообразия процессов. В зависимости от основной цели задачи управления классифицируются следующим образом:,
системы стабилизации - система - алгоритм функционирования которой содержит предписание поддерживать регулируемую величину на постоянном значении (x = const);
система программного управления алгоритм функционирования которой содержит предписание изменять регулируемую величину в соответствии с заданной функцией x(t), функция времени;
следящие системы - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в зависимости от изменения величины на входе значения которой изменяются и заранее незвестны.
От количества контуров:
одноконтурные - содержащие один контур регулирования (одну обратную связь по регулируемому параметру),
многоконтурные - содержащие несколько контуров регулирования (несколько обратных связей, например, по нескольким параметрам, по скорости/ускорению изменения параметра и т. д.).
По качеству управления : устойчивые, оптимальные, улучшенного качества
По характеру сигналов: непрерывные, дискретные (релейные, импульсные), цифровые. В импульсных системах в зависимости от вида импульсной модуляции различают системы с амплитудной, широтной и частотной импульсной модуляцией.
По виду математических моделей: линейные, с постоянными коэффициентами уравнений и принципом суперпозиции; нелинейные, когда хотя бы в одном элементе нарушена линейная зависимость.
По принципу регулирования: по отклонению, по возмущению, комбинированные, адаптивные. Адаптивные системы делятся на самонастраивающиеся и самоорганизующиеся.
По виду используемой энергии:
• пневматические,
• гидравлические,
• электрические,
• механические
• комбинированные
3.3 Подходы к моделированию систем
Классический подход

В 1876 году появилась работа, оказавшая большое влияние на науку о регулировании - труд профессора "Об общей теории регуляторов". В этой работе было выведено условие устойчивости для линейных систем третьего порядка и даны конкретные указания о том, как влияют конструктивные параметры на устойчивость. явился основоположником классической теории регулирования. В 1866 году выходит в свет статья Максвелла "О регуляторах". Швейцарский математик А. Гурвиц в 1895 году ввел алгебраические условия устойчивости для линейных систем любого порядка. Долгое время оставалась неизвестной инженерам аналогичная работа Рауса, выполненная им еще в 1877 году по просьбе Максвелла. В 1932 году американец шведского происхождения Гарри

Активно развивалась использование частотного описания технологических процессов, появились десятки вариаций анализа частотных характеристик. Появились понятия амплитудно-частотных характеристик, фазо-частотных и амплитудно-фазовых характеристик. Строились их годографы (кривые) для визуального определения сколько раз годограф охватывает точку (-1, 0j). Передаточные функции стали основным инструментом работы инженеров автоматчиков. Разрабатывались методы синтеза многомерных и многосвязных систем регулирования на базе передаточных функций. Анализировалась точность и грубость систем управления. Во всех этих разработках объект рассматривался как черный ящик, описываемый только соотношением входных и выходных сигналов.
3.1. Частотное описание систем управления. Классическая теория.
Исследование АСР существенно упрощается при использовании математических методов операционного исчисления, поскольку позволяет от решения дифференциальных уравнений перейти к решению алгебраических уравнений.
Весьма удобно исследовать линейные системы с постоянными параметрами с помощью преобразования Фурье и Лапласа. Идея была простая – вместо функций во времени использовать их представление в виде суммы гармонических колебаний, т. е. синусоид и косинусоид. Фиксируем входные и выходные функции в виде числовых последовательностей.
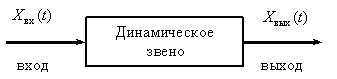
Математик переводит их в частотное представление путем преобразования Фурье или Лапласа Xвх(s) и Xвых(s). С полученным описанием в дальнейшем (при математической обработке) работаем алгебраическими методами линейной алгебры и геометрии. Никаких дифференциальных уравнений.
Передаточные функции динамического звена в этом случае представляют в следующем виде:

Эти функции (спектры) в теории автоматического управления представляют графически, изображая отдельно их действительную и мнимую части:
![]()
Исторически теория автоматического управления (ТАУ) построена на использовании анализ функций комплексной переменной - преобразований Фурье и Лапласа. В этом подходе главные элементы - передаточные функции, функциональные блок-схемы, частотные преобразования входа/выхода, анализ нулей и полюсов. Для таких методов разработаны простые способы получения описаний ОУ. Обычно в частотных методах описывается только связь между входными и выходными сигналами. Часть внутренних переменных и связи между ними остаются скрытыми. Но теряется глубина понимания процессов. Говорят даже о «Черном ящике». Такая модель называется внешним описанием ![]() , в противоположность уравнению состояния.
, в противоположность уравнению состояния.
3.1.1 В основе лежат формулы Эйлера![]() и cos ?t = (e+ j? + e - j?)/. В интегральном представлении соотношение
и cos ?t = (e+ j? + e - j?)/. В интегральном представлении соотношение![]() называют прямым преобразованием Фурье.
называют прямым преобразованием Фурье.
Функция угловой частоты ![]() –
– ![]() называется Фурье-изображением или частотным спектром функции
называется Фурье-изображением или частотным спектром функции
Эти функции (спектры) в теории автоматического управления представляют графически, изображая отдельно их действительную и мнимую части:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
