

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Основное распространение в качестве меры запаса устойчивости получили вытекающие из критерия Найквиста две величины – запас устойчивости по фазе ?? и запас устойчивости по амплитуде ?L в логарифмическом масштабе. Эти величины показаны на рис. 5.4, б для системы с л. ф.х., представленной кривой 1. Запас устойчивости по амплитуде определяется величиной допустимого подъема л. а.ч. х., при котором система окажется на границе устойчивости. Запас устойчивости по фазе определяется величиной по фазе, которую остается до частоты среза, чтобы система оказалась на границе устойчивости. Рекомендуется выбирать запас устойчивости по фазе больше 30° , а запас устойчивости по амплитуде больше 6 дБ. Последнее соответствует примерно двойному запасу коэффициента передачи по устойчивости.
5 Законы регулирования и регуляторы
Разработка математических описаний объектов, сначала разомкнутых, а затем замкнутых, с анализом устойчивости таких систем привела к пониманию необходимости добавки корректирующих звеньев в систему управления. Этим занимается в теории автоматического управления раздел синтеза автоматических систем. Корректирующие звенья исправляют амплитудно-частотные и фазовые характеристики автоматической системы так, чтобы выполнялись требованиям по критериям устойчивости. В настоящее время разработаны и повсюду применяются стандартные корректирующие звенья – регуляторы. Каждый регулятор в свою очередь состоит из нескольких простых звеньев. Обычно это звено линейного усиления, интегрирующее звено и дифференциальное звено. Мы рассмотрим работу регуляторов, как с математической точки зрения, так и с анализа их частотных характеристик.
Передаточная функция замкнутой системы имеет вид: W(p) = K(p)Wo(p) /(1+K(p)Wo(p)). Процесс подбора передаточных функций звеньев называется синтезом. Основные этапы синтеза системы:
1) Задаться желаемой передаточной функцией замкнутой системы Фжел(p), при которой обеспечивается желаемая переходная функция системы.
2) Определить желаемую передаточную функцию разомкнутой системы по формуле:
3) Найти передаточную функцию корректирующего устройства.
Наиболее важным является первый этап – этап выбора Фжел(p). Её определение осуществляется на основе корневого метода, который заключается в том, что корни характеристического уравнения системы помещаются в заданные положения на комплексной плоскости, что обеспечивает желаемое быстродействие и желаемый вид переходных процессов.
Примем вид желаемой ПФ замкнутой системы.
 . Выберем аn =1
. Выберем аn =1
Обозначим корни характеристического уравнения p1, p2, … pn и введем понятие среднегеометрического корня характеристического уравнения: A=![]() . Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню). Среднегеометрический корень связан с коэффициентом a0 по формуле: An =1/a0. Коэффициенты Ск = ак Аn-k, k=1…n–1.
. Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню). Среднегеометрический корень связан с коэффициентом a0 по формуле: An =1/a0. Коэффициенты Ск = ак Аn-k, k=1…n–1.
 =
= =
= , где Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню). Коэффициенты Ск = ак Аn-k, k=1…n–1.
, где Т = 1/А – базовая постоянная времени системы (величина обратная среднегеометрическому корню). Коэффициенты Ск = ак Аn-k, k=1…n–1.
Чтобы выбрать желаемую передаточную функцию системы необходимо
1) Определить порядок n желаемой передаточной функции системы.
2) Выбрать определенный способ распределения корней характеристического уравнения на комплексной плоскости. Выбор стандартного распределения сразу определяет стандартную формулу передаточной функции.
3) Определить коэффициенты ск (для типовых способов распределения корней они приводятся в справочниках).
4) Определить величину среднегеометрического корня А (или базовой постоянной времени Т), исходя из требуемого быстродействия системы (времени переходного процесса).
Пример типового распределения корней (биномиального): Все корни характеристического уравнения выбираются одинаковыми, действительными и равными (–А).
Тогда желаемая передаточная функция системы:
Знаменатель данной функции представляет собой бином Ньютона. Запишем желаемые передаточные функции для различных порядков системы.
n |
|
1 |
|
2 |
|
3 |
|
4 |
|

При выборе биномиальной функции для любого n переходные процессы получаются монотонными. Биномиальное распределение корней применяют в тех случаях, когда перерегулирование недопустимо. Для каждого порядка системы будет свое относительное время переходного процесса ?пп
n | 1 | 2 | 3 | 4 |
?пп, о. е. | 3 | 4,75 | 6,3 | 7,8 |
Если прядок системы n выбран и задано желаемое время переходного процесса tпп, то среднегеометрический корень определяется по формуле:

Рассмотрим переходные функции системы при биномиальном распределении корней. Эти переходные функции будем рассматривать в относительном времени ?=А·t. Такие переходные функции будут универсальными, поскольку они подходят для любого значения А.
Таким образом, чем более высокое быстродействие требуется (чем меньше tпп), тем больше по модулю должен быть среднегеометрический корень.
5.2 Стандартные корректирующие звенья:
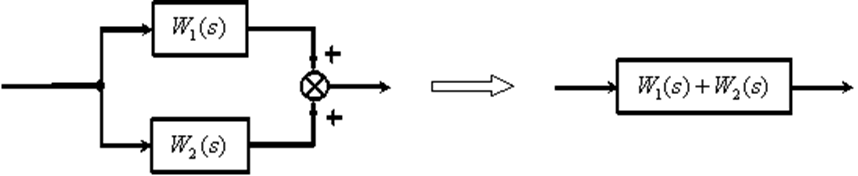
В настоящее время разработан и повсюду применяются набор стандартных корректирующих звеньев, объединенных в общую систему, которая называется регулятором. Каждый регулятор содержит нескольких простых звеньев. Обычно это звено линейного усиления, интегрирующее звено и дифференциальное звено. Они в свою очередь соединены параллельно, что приводит к сложению их передаточных функций.
Эти звенья вырабатывают управляющее воздействие U(t). Мы рассмотрим работу регуляторов, как с математической точки зрения, так и с анализа их частотных характеристик.
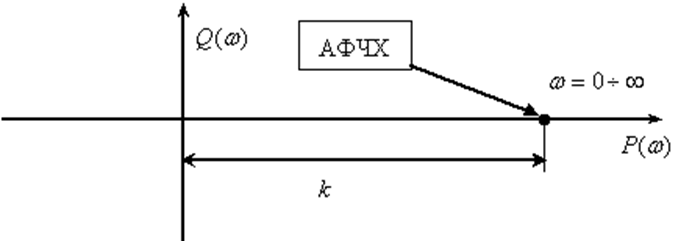
Усилительное звено (пропорциональное регулирование). П-закон. Для пропорционального регулирования управляющее воздействие должно быть пропорционально входного сигнала (величине рассогласования). Если регулируемый параметр отклоняется от заданного значения, требуется увеличивать воздействие на объект. Коэффициент пропорциональности обозначают как K1: u = K1.e.
Передаточная функция П-регулятора имеет вид: ![]() . Если величина ошибки равна, например, единице, то управляющее воздействие станет равным K1 (см. рисунок).
. Если величина ошибки равна, например, единице, то управляющее воздействие станет равным K1 (см. рисунок).

![]()
![]()
Интегрирующее звено (интегральное регулирование).
И-закон Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
![]() . К0 = 1/Т. Передаточная функция звена:
. К0 = 1/Т. Передаточная функция звена:
![]()
Временные характеристики
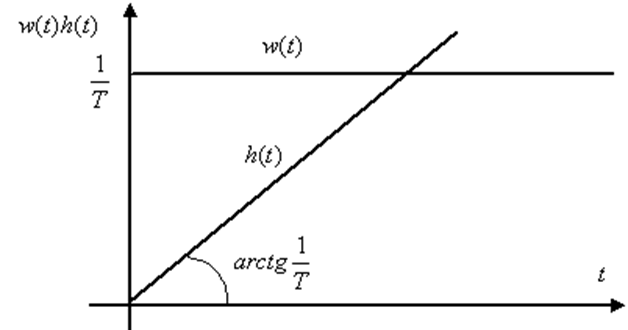
Интегральное звено запоминает значение импульса и складывает импульсы приходящие один за другим. При возникновении отклонения управляющее воздействие начинает увеличиваться со скоростью, пропорциональной величине рассогласования. Например, при е = 1 скорость роста управляющего воздействия будет равна 1/Т. Частотные характеристики звена:
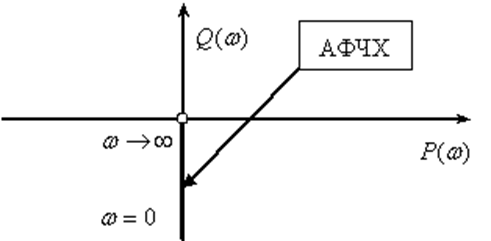
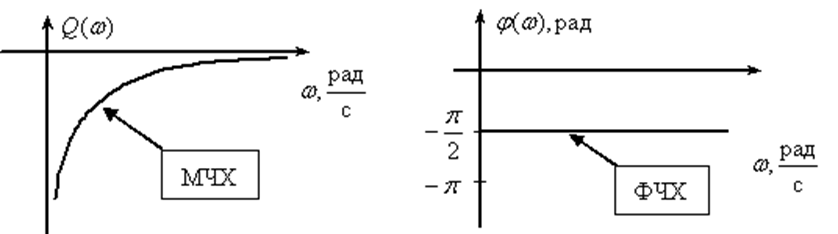
Достоинство данного принципа регулирования в отсутствии статической ошибки, т. е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток – содействует неустойчивости процесса из-за отставания по фазе.
Дифференцирующее звено (дифференциальное регулирование).
Д-закон. Регулирование ведется по величине скорости изменения регулируемой величины:
![]() . К2 = Т. Передаточная функция
. К2 = Т. Передаточная функция

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
