

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Цели автоматизации
Основными целями автоматизации являются:
Повышение эффективности производственного процесса.
Повышение безремонтного пробега оборудования
Повышение безопасности.
Облегчение работы персоналу;
Повышение экологии производства.
Повышение экономичности (в том числе сокращение численности).
Цели достигаются посредством решения следующих задач автоматизации технологического процесса:
Регулированием с оптимальным качеством
Обеспечения согласованного взаимодействия подсистем управления
Обеспечения гарантированного срабатывания технологических защит и блокировок
Обеспечение достоверности информации о технологическом процессе
Перенос пультов управления в места с нормальными условиями работы
Повышение времени безотказной работы оборудования
Улучшение эргономики труда операторов процесса
Организацией длительного хранения и обработке информации о процессах и аварийных ситуациях
Типовые фикции Разработчика систем автоматического регулирования:
1.Постановка задачи.
2.Комплексное проектирование.
3.Заказ оборудования.
4.Шеф-монтаж оборудования на объекте.
5.Наладка и введение оборудования в эксплуатацию.
Цель подсказывает Средства.
Разные специалисты ставят высшие приоритеты разным целям, и значит, и решают их разными средствами. Это субъективная составляющая. Различная степень опасности и ущерба в аварийных ситуациях и требования к качеству объективно определяют выбор средств автоматики и способы решения задач. Поэтому на практике работают сильно отличающиеся друг от друга системы контроля и управления. Разное число работников, различная степень технологических защит и блокировок, различный уровень автоматизации.
1.2 Основные понятия теории автоматического управления.
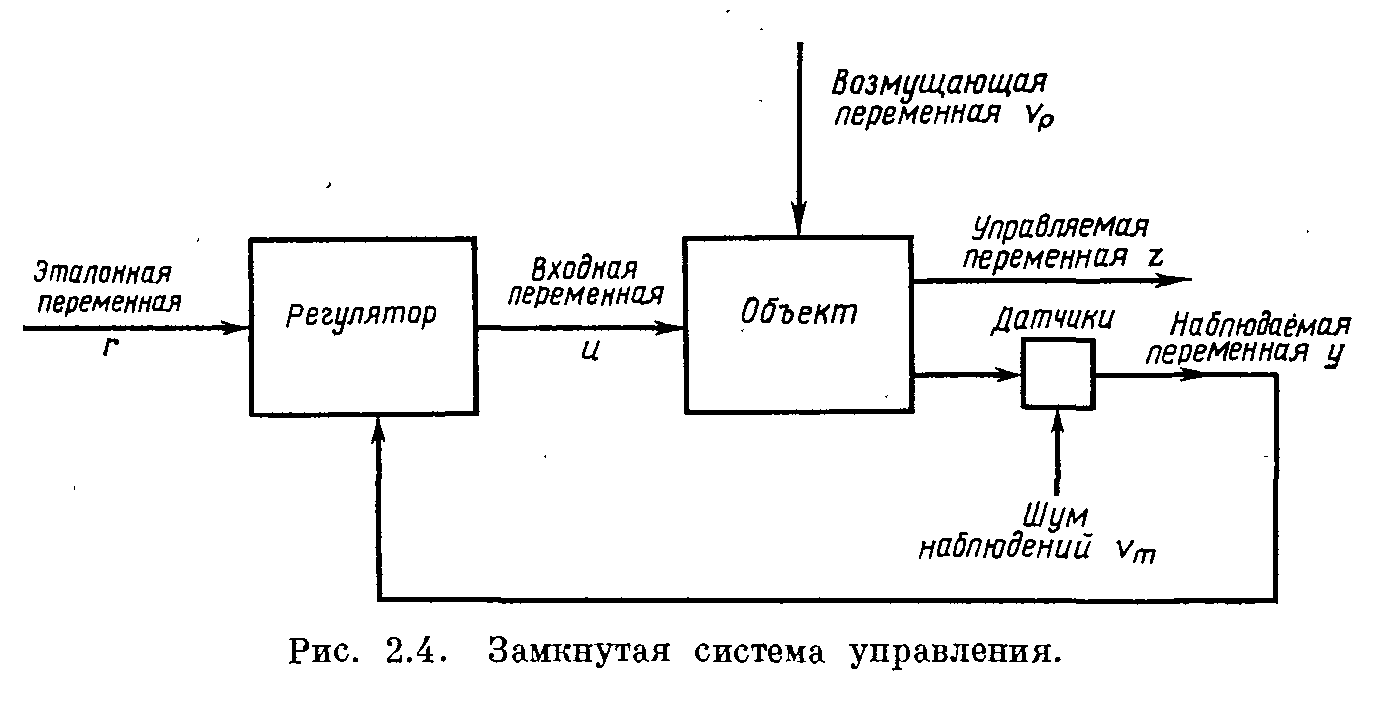
Любая система управления (ручного, автоматического или автоматизированного) в обязательном порядке содержит четыре элемента (или четыре множества элементов), объединенных в замкнутый контур передачи воздействий (см. рисунок 1.2):
- объект управления,
- управляющая часть,
- датчик (датчики),
- регулирующие и исполнительные устройства.
Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса. Например, температура, давление, расход, напряжение, состав и т. д.
Параметр технологического процесса, который необходимо поддерживается нашими устройствами постоянным или меняется по определенному нами закону, называется регулируемой переменной (параметром). Значение регулируемой величины в данный момент времени называется мгновенным значением. Значение регулируемой величины, полученное в данный момент времени на основании измерений, называется ее измеренным значением.
Входное воздействие (U) оно же регулирующая переменная – материальный поток, изменение которого вызывает изменение параметра технологического процесса. Например, количество пара.
Объект управления (объект регулирования) – система, требуемый режим выходных параметров которой должен изменяться или поддерживаться управляющими воздействиями.
Управляемые переменные (параметры) - параметры технологического процесса, которые нужно поддерживать в заданных границах. Являются частью наблюдаемых параметров.
Возмущающее воздействие (v) – ненаблюдаемое или неизменяемое случайное воздействие, которое изменяет состояние объекта управления и приводит к изменению выходных параметров. Например, температура окружающей среды или внутренние возмущения в объекте управления.
Наблюдаемые переменные (параметры) (Y) - Измеряемые и непрерывно рассчитываемые технологические параметры в потоках или аппаратах, которые однозначно характеризуют состояние объекта управления.
Шумы измерений (Возмущение Vm) – дополнительное воздействие внешних сигналов на систему измерений, преобразований и расчётов. Она искажают оценку протекания процессов.
Более детальное представление объекта управления:
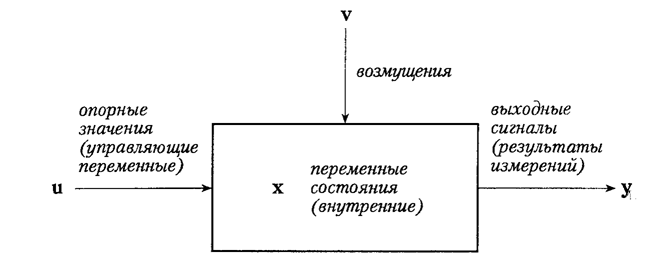
Переменные состояния - в настоящее время процессы моделируют набором связанных между собой дифференциальных и обычных уравнений (баланс энергии, массы, компонентов масс, сил и моментов). Состоянием объекта называется набор всех переменных, производные которых входят в систему дифференциальных уравнений. Состояние представляют вектор – столбцом из переменных.
![]()
Датчик (Д) – устройство или комплекс устройств, преобразующих измеряемый параметр технологического процесса в вид, удобный для дальнейшей передачи и использования. Технологические параметры невозможно контролировать (наблюдать, выводить на пульт оператора, вводить в приборы и т. д.) без дополнительных технических средств. Например, для получения температуру объекта используют разного рода преобразователи, которые преобразуют интенсивность температуры в наблюдаемые или стандартные сигналы для другим приборам.
Система регулирования содержит регуляторы и исполнительные механизмы (ИУ, ИМ). Их предназначение - воздействовать на технологический процесс и изменять состояние объекта управления. Исполнительные устройства представляют собой преобразователи. На вход механизма обычно подается управляющий стандартный сигнал. Он превращается в движение штока клапана или поворот заслонки. Исполнительные механизмы устанавливаются на трубопроводах сырья, материалов или энергоносителей. В результате изменяется состояние технологического объекта, что и означает регулирование.
Важные дополнительные определения:
Управление – формирование управляющих воздействий (чаще всего –энергетических потоков), обеспечивающих требуемый режим работы объекта управления (ОУ).
Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ.
Регулятор или Управляющее устройство (Р) - устройство или программа, осуществляющее расчёт управляющего воздействия с целью обеспечения требуемого режима работы.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Задание - Значение параметра (воздействия) указывающее его желаемую величину или закон изменения этой регулируемой величины.
1.3. Некоторые вопросы проектирования
Каждый датчик и преобразователь имеет ограничения применения по средам и диапазонам измерения и, соответственно, по шкалам измерения. Поэтому при выборе датчика следует очень внимательно рассматривать его характеристики и возможности. На производстве много проблем с несоответствием приобретённых приборов для контроля с реальными параметрами среды. Например, вихревые датчики расхода с ограничением по нижней границе вызывали остановки установки дистилляции на VKG.
Прежде всего, нужно свести в единую систему все единицы измерений и технологических параметров в контролируемом и управляемом технологическом процессе. Для этого нужно разбираться в единицах измерения технологических параметров, в характеристиках коррозионной устойчивости, взрывоопасности и пожароопасности. Требуется увязывать требования к монтажу и возможности установке на месте измерения.
Датчики преобразователи и исполнительные механизмы характеризуются типами входного сигнала (электрический, оптический, механический, пневматический и др.) и границами его изменения. Исполнительные механизмы в зависимости от источников питания бывают разных типов: электрические, пневматические, гидравлические. В настоящее время в качестве исполнительных механизмов широко используются электрические двигатели с управляемой частотой вращения. Это наиболее экономичный способ регулирования.
Исполнительные механизмы:
Заслонки регулирующие и запорно-регулирующие. Заслонка представляет собой корпус цилиндрической формы (редко - квадратной), по внешнему виду напоминающий короткий отрезок трубы. Внутри корпуса расположена ось, на которой закреплен затвор. Затвор движется вращательно, поворачиваясь на 90 градусов. Управление затвором обычно осуществляется при помощи привода. При передаче движения от привода, затвор поворачивается вокруг оси, открывая, таким образом, проход корпуса, через который проходит рабочая среда. См. рисунок Zasl;nka.
Клапана односедельные и двухседельные, в которых используется система затвор – седло. Затвор (шток) перекрывает седло(выемка), меняя диаметр прохода для среды.
Управляющая часть зависит от того какую роль предусмотрена человеку, оператору процесса. В любом случае имеется устройство (прибор) для визуализации ( показаний значения) сигнала датчика.
Вариант 1ый. Оператор анализирует ситуацию и с ручного задатчика на пульте или штурвалом на вентиле («мартышка» в помощь) меняет положение исполнительного устройства. Например, увеличивая расход пара на объект. Это – ручное управление. Кроме прибора для показаний есть устройство воздействия на ИУ. Оператор самостоятельно поддерживает нужное значение параметра.
Вариант 2. Сигнал от датчика приходит на регулирующий прибор. Обычно прибор содержит устройство показаний значения параметра. Главная его часть прибора– вычислительный комплекс, аналоговый или числовой, который по разности между требуемым значением параметра и реальным текущим значением изменяет положения исполнительного механизма. Очень часто таким устройством является электропривод (actuator). Это режим автоматического регулирования параметра. Оператор следит за параметром и меняет задание
Вариант 3. Система такая же, как в варианте 2, но задание задает не оператор, а другие устройства, координирующие взаимодействие различных контуров регулирования. Такая программная система – система автоматизированного управления.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
