

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
Частотные характеристики: ![]()
![]()
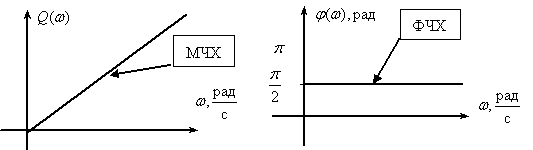
Временные характеристики: Импульсная функция w =Т •d?/dt, Переходная функция h = Т •?
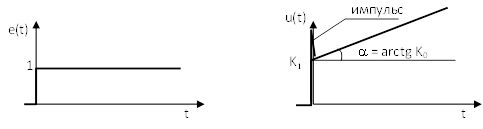
При использовании дифференцирующего звена быстрый рост регулируемой величины вызовет большее управляющее воздействие. При медленном росте – меньшее воздействие. Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Например, если ошибка имеет вид ступенчатого сигнала е = 1, то на выходе такого регулятора будет наблюдаться один импульс (?-функция). При быстром отклонении регулирующей величины управляющее воздействие по модулю будет больше. При медленном – меньше.
На практике типовые П-, И - и Д-законы регулирования редко используются в чистом виде. Чаще они комбинируются и реализуются в виде ПИ-регуляторов и ПИД-регуляторов. Регулирующие звенья объединяются параллельно, их выходные сигналы складываются. Эти звенья относятся к элементарным. Промышленная реализация их не сложна и не очень трудоемка. Широкий диапазон изменения коэффициентов и постоянных времени позволяет корректировать и заметно менять частотные характеристики объектов управления.
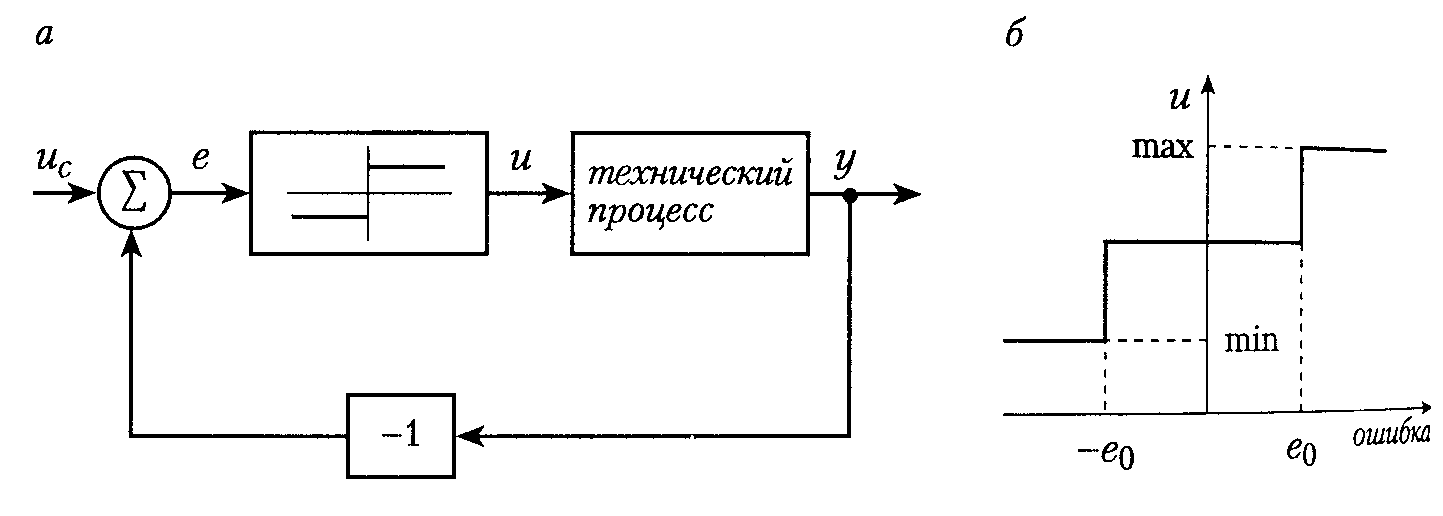
Регуляторы по физической реализации можно разделить на аналоговые, цифровые и дискретные. К дискретным регуляторам относятся позиционные и релейные. Наибольшее распространение среди аналоговых получили Пропорционально-Интегрально-Дифференциальные регуляторы, сокращенно ПИД регуляторы, реализующие типовые законы регулирования. Такие же законы реализуют цифровые ПИД регуляторы, которые можно создавать каждому программисту. Цифровые регуляторы не только повторяют алгоритмы аналоговых, но и позволяют реализовывать сложные алгоритмы, недоступные для аналоговой техники. Простые формы регуляторов уже заложены в стандартное обеспечение контроллеров и SCADA систем.
Релейные (позиционные) регуляторы это простые и надежные регуляторы, у которых выходное значение принимает всего два значения. Используются в системах управления уровнем, дозировки, технологической защиты и так далее. Для них U = Umax, если е ?0 и U = Umin если е? 0, где е=U-Y.
5.2.1 Комбинированный ПИ-регулятор (пропорционально-интегральный регулятор):
Представляет собой два параллельно работающих звена - Пропорционального и Интегрального. Данное соединение сочетает в себе достоинства обоих звеньев: быстродействие и отсутствие статической ошибки.
ПИ-закон регулирования описывается уравнением
![]()
и передаточной функцией
WПИ(s) = K1 + К0/s.
ПИ-регулятор имеет два независимых параметра (настройки): Kи – коэффициент интегральной части и Kп – коэффициент пропорциональной.
При возникновении рассогласования е = 1 управляющее воздействие изменяется, как показано на рисунке
Общую структурную схему замкнутого контура управления для ПИ – регулятора можно представить в виде:

5.2.2 ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регулирующих звеньев.
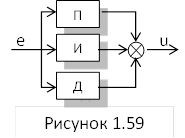
Закон ПИД-регулирования описывается уравнением: ![]()
и передаточной функцией WПИД(s) = K0/s + K1 + K2 s. ПИД-регулятор имеет три коэффициента настройки: K0, K1 и K2.
ПИД-регулятор является самым распространённым типовым регулятором, поскольку он сочетает в себе достоинства всех трех элементарных корректирующих звеньев. Мгновенная реакция такого регулятора на единичное ступенчатое изменение рассогласования показана на рисунке:
Приобретая промышленный ПИ или ПИД регулятор, вы не имеете гарантий, что с помощью трех типовых элементарных звеньев сможете изменить характеристики результирующего объекта управления и добьётесь устойчивости замкнутой системы. Чтобы повысить вероятность достижения этого результата, изготовитель обеспечивает возможность менять частотные и временные характеристики каждого из звеньев в очень широких пределах. Учитывайте возможности и диапазон параметров регулятора при его выборе для работы.
5.3 . Математическое описание ПИД регулятора.
Согласно принципу обратной связи входным сигналом, как для аналогового, так и для цифрового регулятора является величина отклонения, которая определяется как разность между заданным и текущим значением регулируемого параметра (e = z – у). Выходным сигналом регулятора является величина воздействия (управляющего u), подаваемая на исполнительный механизм. В настоящее время входы и выходы реализуется в виде стандартных сигналов. В некоторых случаях выход регулятора представляет собой последовательность импульсов для исполнительного механизма, например, шагового двигателя.
Уравнение классического ПИД регулятора в его классическом математическом выражении имеет вид:
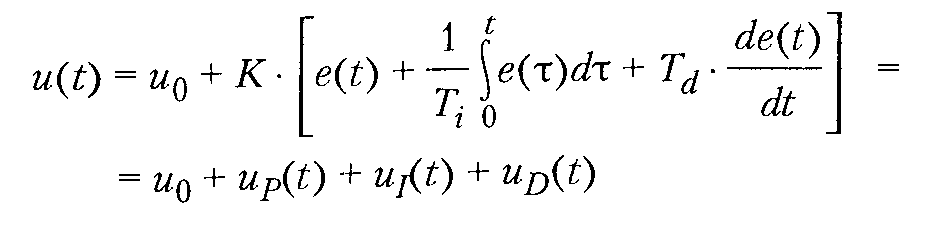
ПИД регулятор вырабатывает управляющий сигнал как сумму трех составляющих. Кроме того можно задавать начальное значение выходного сигнала - UО. Первая составляющая Up пропорциональна рассогласованию e(t) (напомним, е это разница выходного сигнала и задания), вторая составляющая Ui равна интегралу (сумме) по времени отклонений всех e(t), а третья часть суммы равна производной отклонения e(t). Совместно действуют три корректирующих элементарных звена - пропорционального интегрального и регулирования по производной.
Базовый сигнал UО, будет на выходе регулятора в начале процесса регулирования. Кроме того он играет роль поправочного значение, а также смещения. Параметр К – коэффициент усиления регулятора. Ti – постоянная времени регулирования, Td – постоянная времени дифференцирования. Эти параметры используются для настройки системы управления и изменения качества регулирования. Усиление регулятора – К - безразмерная величина. Постоянные времени выражаются в секундах. Выход реального регулятора всегда ограничен некоторыми пределами Umax и Umin.
Интегральная часть важна для устранения статической ошибки. Она накапливает и запоминает значение своего выхода для каждого момента времени. Если замкнутая система регулирования достигла заданного значения величины e(t) и Uр(t) станут равны 0, но допустить, чтобы u(t) на выходе регулятора стала равна 0 нельзя. При нулевом выходном сигнале регулятора исполнительные механизмы закроются и технологический процесс прекратится. И тут на помощь приходит интегральная часть, которая помнит свой выходной сигнал Ui на момент, соответствующий достижения заданного значения. На выходе регулятора останется эта величина сигнал Ui.
Соответственно, если снова начнет меняется величина e(t), то начнут изменяться все выходы корректирующих звеньев, включая Ui, который будет накапливать и запоминать свой выход на пути к заданному значению.
Дифференциальная часть следит за скоростью изменения параметра и прогнозирует величину следующего отклонения от задания. В зависимости от прогноза она воздействует на управляющий сигнал, тормозя или ускоряя его рост.
5.3.1 Реализация ПИД регулятора в контроллерах и компьютерах.
Разработчикам приходится реализовывать ПИД-регулятор на устройствах вычислительной техники в дискретном числовом виде. Выражение, которое нужно запрограммировать имеет вид:
?U(i) = U(i) - U(i-1) = ?Up(i) + ?Ui(i) + ?UD(i) где
?Up(i) = К• e(i)
?Ui(i) = Ui(i-1) + Ki • e(i) Ki = K • h/ Ti Ui(0) = UО
?UD(i) = KD • (Y(i) - Y(i-1))
Здесь учитывается то, что все действия в компьютерах (контроллерах) осуществляются пошагово. U(i) и e(i) – это значения выхода регулятора и величины рассогласования на (i) шаге. U(i-1) – это значение выхода регулятора на прошлом (i-1) шаге. Y(i) и Y(i-1) – значение регулируемой величины на текущем и прошлом шаге.
Регулятор на каждом шаге рассчитывает величину приращения управляющего сигнала ?U(i), который добавляется (или вычитается) к предыдущему сигналу на исполнительный механизм.
U(i) = U(i-1) + ?U(i). (i), (i-1) – номера шагов управления. Контроллер (компьютер) выдает на исполнительный механизм значение U(i).
Начальное значение UО включено в состав интегральной части как ее значение на первом шаге и далее в явном виде не проявляется. При изменении свойств объекта управления регулятор сам будет подстраиваться под объект путем подбора нового значения Ui при достигнутом заданном режиме.
В вычислительном плане алгоритм чрезвычайно прост. Требуется:
ввести коэффициенты К, Ki, KD и величину UО в программу;
запомнить значение выходного сигнала с регулятора U(i-1);
получить значения e(i) = Y(i) - Y(i-1);
рассчитать значения ?Up(i), ?Ui(i), ?UD(i) по указанным выше формулам;
рассчитать значение ?U(i);

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
