

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() .
.
. Отдельно рассмотрим объект управления:
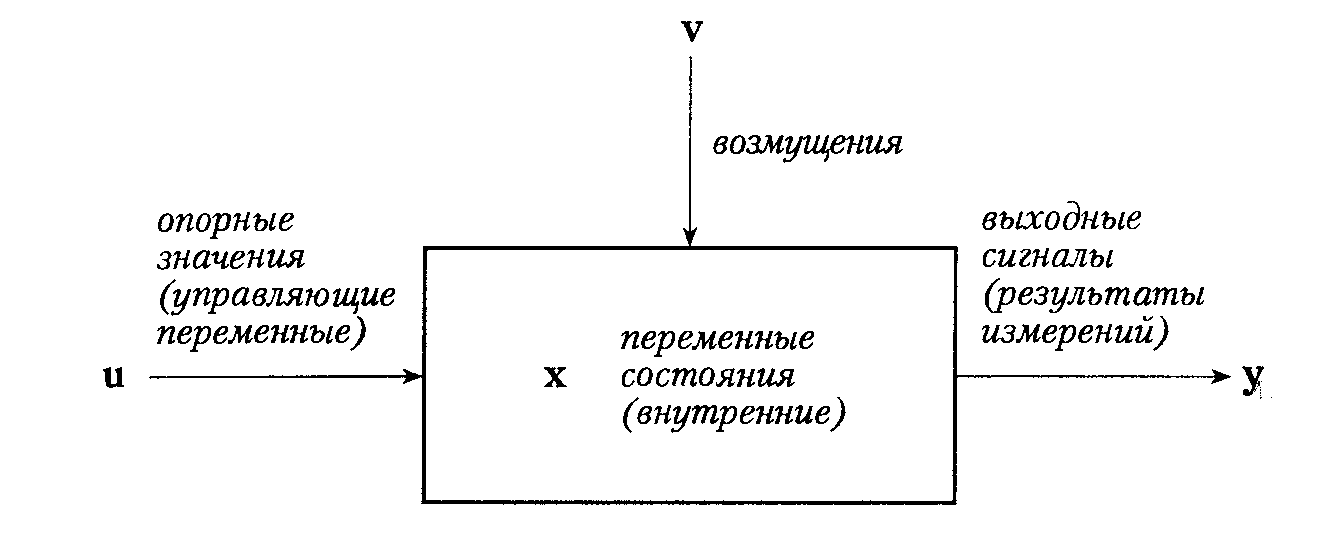
Обычно число управляющих величин R меньше, чем переменных состояния N
Возмущения (изменения нагрузки, внутренние шумы) которые влияют на переменные состояния, обозначаются V:
![]()
формула, связывающая передаточную функцию с параметрами уравнения состояния объекта.
5.2 Пример описание линейных многомерных процессов
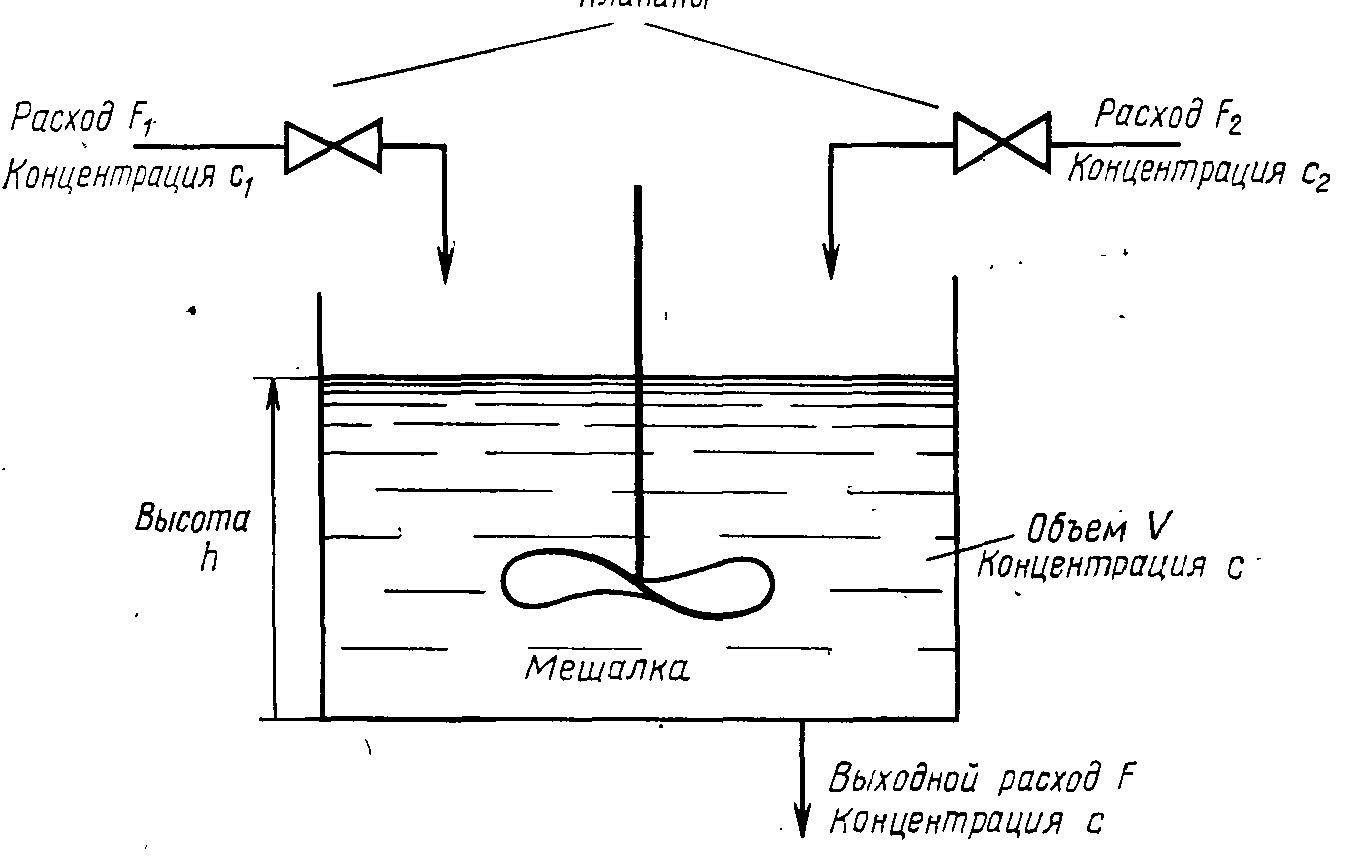
Часто можно использовать информацию материального баланса и законов физики. На примере смесительного бака посмотрим методологию такого моделирования.
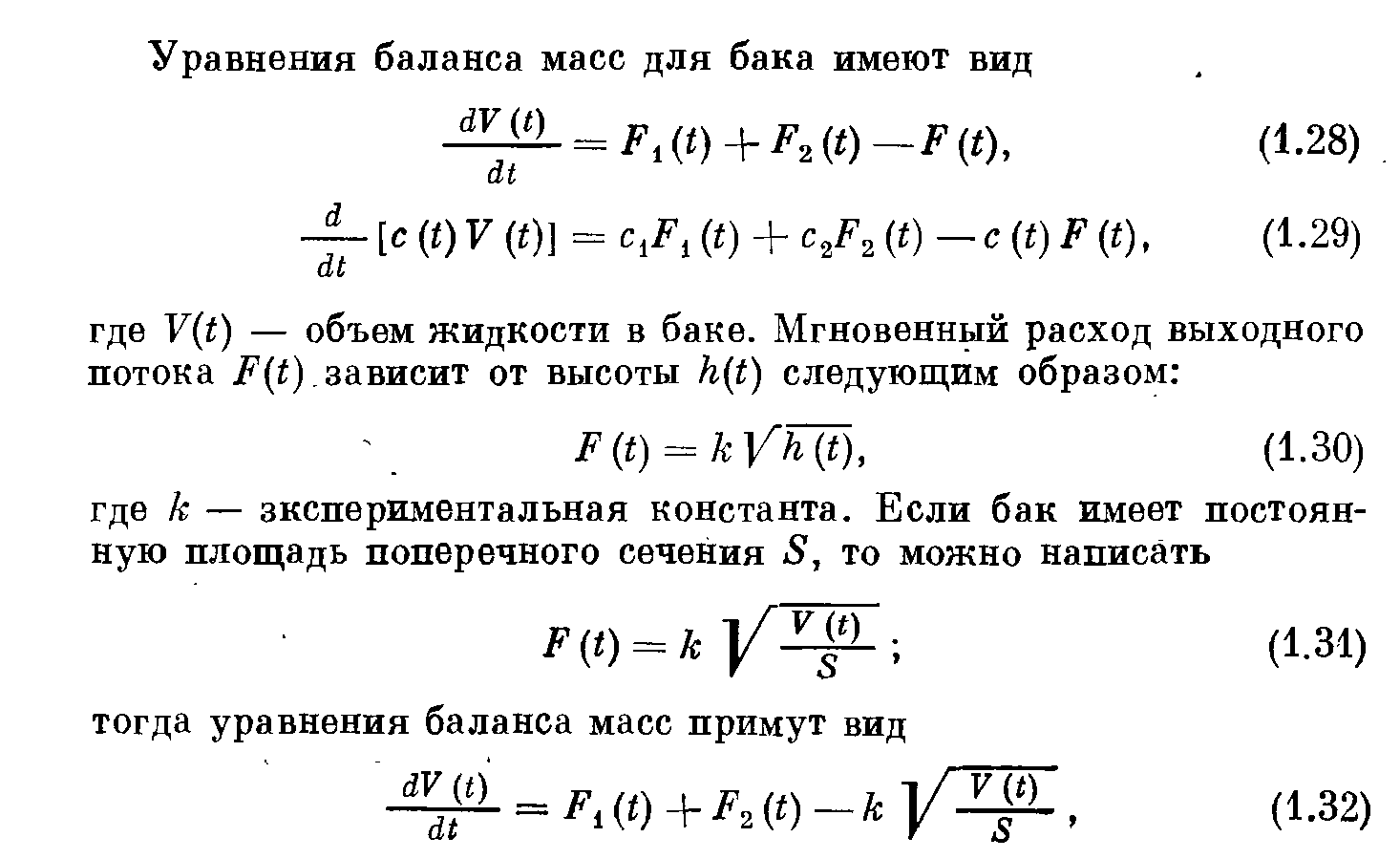
Рассмотрим смесительный бак, схема которого представлена на рис. 1.З Бак наполняется с помощью двух потоков, имеющих переменные мгновенные расходы F1(t) и F2(t). Оба входных потока содержат растворимое вещество с постоянными величинами концентрации c1 и с2. Выходной поток имеет массовую скорость истечения F(t). Предполагается, что содержимое бака перемешивается так, что концентрация выходного потока равна концентрации c(t) в баке. Вентили позволяют менять расходы F1(t) и F2(t). Выходной поток F(t) неуправляемый, самотек, и зависит от высоты жидкости h в емкости. Этот расход определяется законами физики и рассчитывается согласно формуле 1.30. В сою очередь, высоту можно определять как объем деленный на площадь поперечного сечения бака. Поскольку в баке работает мешалка, происходит активное перемешивание и концентрация практически мгновенно усредняется по всему объему. Концентрация на выходе из бака будет равна концентрации в нем. Первое уравнение это уравнения баланса масс. Второе уравнение это уравнение баланса массы компонента – растворимого вещества, например, кислоты.. При дифференцировании этого уравнения мы должны будем использовать правило дифференцирования произведения переменных.
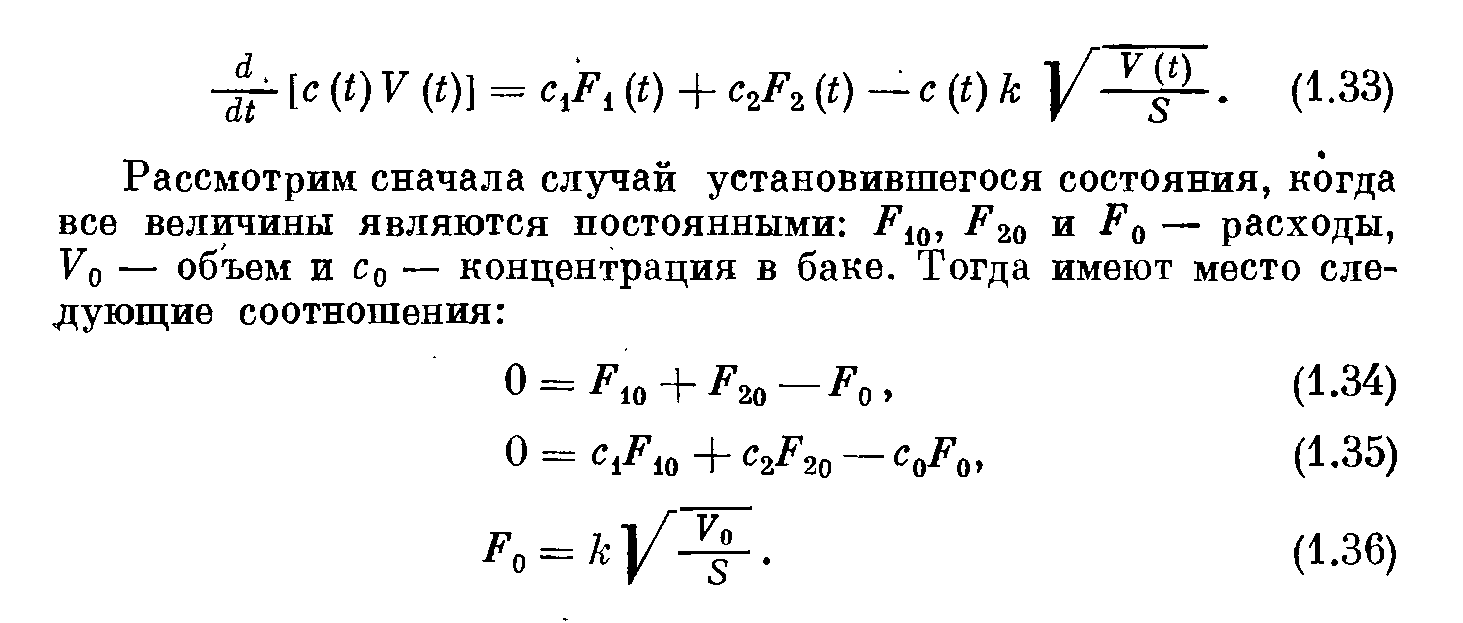
Установившееся значение процесса используется как заданный уровень, относительно которого справедливы дифференциальные уравнения. Значения этого режима являются начальными значениями для дифуравнений.
Связь переменных состояния и входных переменных, описанная в уравнениях будет представлена системой линейных уравнений. Величина ? есть время заполнения бака.

В матричном виде с матрица С, связывающая измеряемые величины с параметрами состояния, имеет вид:
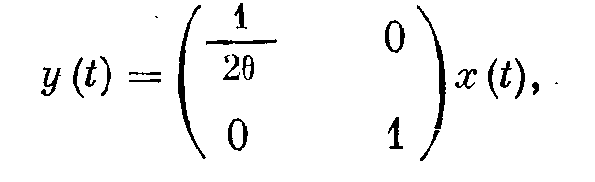 Мы добились соответствия нашей системы общему виду.
Мы добились соответствия нашей системы общему виду.
Если численные значения расходов, концентраций и объема в установившемся режиме будут, например: ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
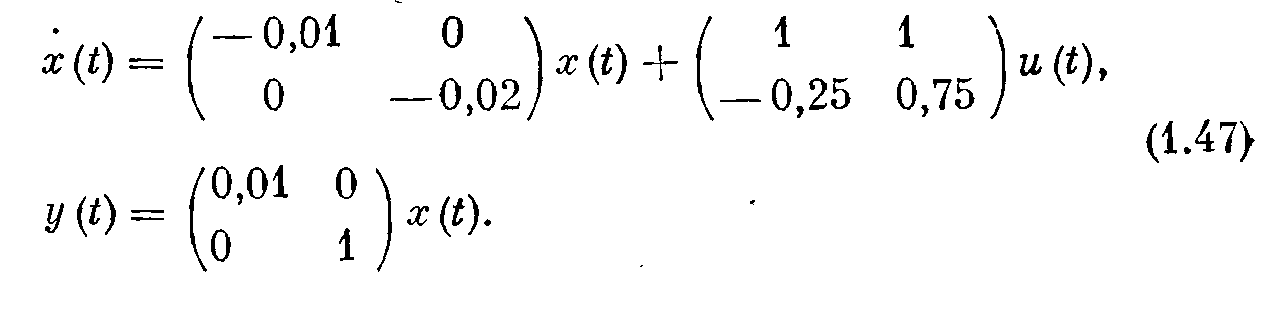
то система уравнений после подстановки численных значений выглядит так:
В общем случае решение для Х(t) систем с постоянными параметрами записывается
![]()
Где ?i собственные значения (полюса) характеристического уравнения матрицы А, еi - - соответствующие им собственные вектора, ?i – коэффициенты с учётом начальных значений Х0.
6. Свойства и параметры систем управления
Анализ свойств матричной системы методами линейной алгебры позволяет оценивать такие свойства системы как Управляемость объекта и Восстанавливаемость (наблюдаемость) системы.
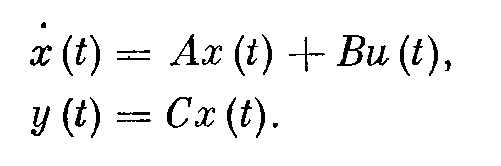
В свою очередь для наблюдаемых систем x°(t) = A (t) x(t) + B (t) u (t)
y(t)=C(t)• X(t)
с помощью восстановителя состояния
x?° (t)=A (t)x? (t) + B(t) u(t) + K(t) [y (t) - C(t)x ? (t) ]
получают x ? - оценки параметров состояния Х, в том числе и неизменяемых величин.
Наблюдатель использует принцип обратной связи и сравнивает оценку измерений, полученную с использованием оценки состояния, со значением, полученным непосредственно от датчиков.
Восстановители состояния реализуются на вычислительных устройствах – компьютерах и контроллерах.
7 Заземление и экранирование
Сигналы, вырабатываемые датчиками, имеют низкий уровень напряжения и импеданса. Уровни сигнала датчика, кабеля, входного устройства должны соответствовать друг другу. Достижение указанного соответствия называется согласованием сигнала.
Импеданс - полное сопротивление цепи (активные и реактивные элементы).
Чтобы добиться максимальной мощности информационного сигнала, нужно, чтобы входное сопротивление приемника совпадало с выходным сопротивлением передатчика. Для согласования уровней сигнала и импеданса используются устройства усиления, например операционные усилители. Операционный усилитель имеет высокий входной импеданс (несколько Мом) и низкий выходной импеданс (ниже 100 Ом). На базе операционных усилителей строятся схемы согласования сигнала.
Если длинна линии такова, что время распространения сигнала между концами линии соизмеримо с периодом сигнала, возникают побочные эффекты, в том числе отражение сигналов.
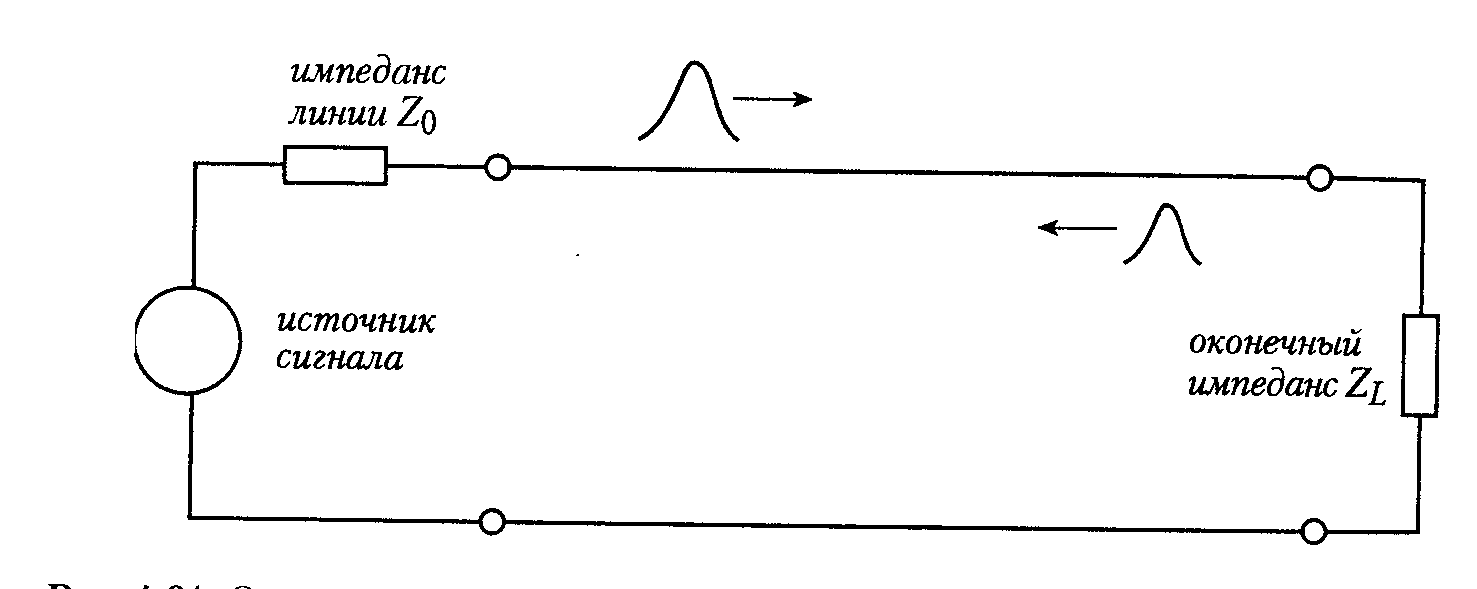
Отражение сигнала при несогласовании импеданса.
Коэффициент отражения равен ![]() . В идеальном случае импеданс нагрузки должен быть равен импедансу линии. Импульсы в несогласованной линии перемещаются туда и обратно с затухающей амплитудой. Такое движение вносит помехи и искажает информационные сигналы.
. В идеальном случае импеданс нагрузки должен быть равен импедансу линии. Импульсы в несогласованной линии перемещаются туда и обратно с затухающей амплитудой. Такое движение вносит помехи и искажает информационные сигналы.
Согласованность линии повышается применением кабелей типа «витая пара», где каждая пара проводов симметрично переплетены между собой. Такие пары проводов меньше чувствительны к внешним электромагнитным воздействиям и излучают меньшую энергию во внешнее пространство.
Электромагнитные помехи имеют различную природу. Индукционные и емкостные помехи и связи зависят от частоты помех. Помехи резистивные не зависят от частоты возмущающего сигнала. Серьезные проблемы с помехами возникают, когда проводники с сигналами от датчиков находятся вблизи силовых кабелей. Емкостные помехи возникают из за того переменное напряжение индуцирует переменный ток по выражению: ![]() , где С – емкость линии. Способ устранения емкостных помех – защитный электростатический экран. Экран должен быть заземлен, что бы потенциал был равен 0. Экран изготовляется из медной сетки и фольги.
, где С – емкость линии. Способ устранения емкостных помех – защитный электростатический экран. Экран должен быть заземлен, что бы потенциал был равен 0. Экран изготовляется из медной сетки и фольги.
Индуктивные помехи возникают из за того переменный ток индуцирует магнитное поле, а оно наводит в другом проводнике переменное напряжение. Если проводник является частью замкнутого контура, то в нем циркулирует ток. Магнитные поля ослабляются защитным экранированием. Для уменьшения мощности помех источники экранируется защитными сферами и стенами. Кабели должны прокладывается так, чтобы поля помех распространялись вдоль них. Высоковольтные и низковольтные сигналы должны пересекаться под прямым углом. Расстояние до источников помех должно быть максимально.
Для сброса электромагнитных помех на землю все носители помех и случайных токов должны быть заземлены. Заземление это физическое соединение нескольких цепей к общему потенциалу. Информационное (сигнальное) заземление должно быть собрано и подключено в общей точке нулевого потенциала. Если существует несколько точек заземления с разными потенциалами, то между ними существует ток утечки и дополнительные помехи.
Заземление экранов кабелей - важное защитное мероприятие. Чтобы уменьшить токи утечки, экраны кабелей соединяют с общим единым общим потенциалам («землей») только в одной точке. В сложных системах имеется отдельные заземления для датчиков, отдельные заземления для силовых элементов, для защитных экранов. Но эти отдельные заземления связаны с общей точкой заземления, что представлено на схеме:
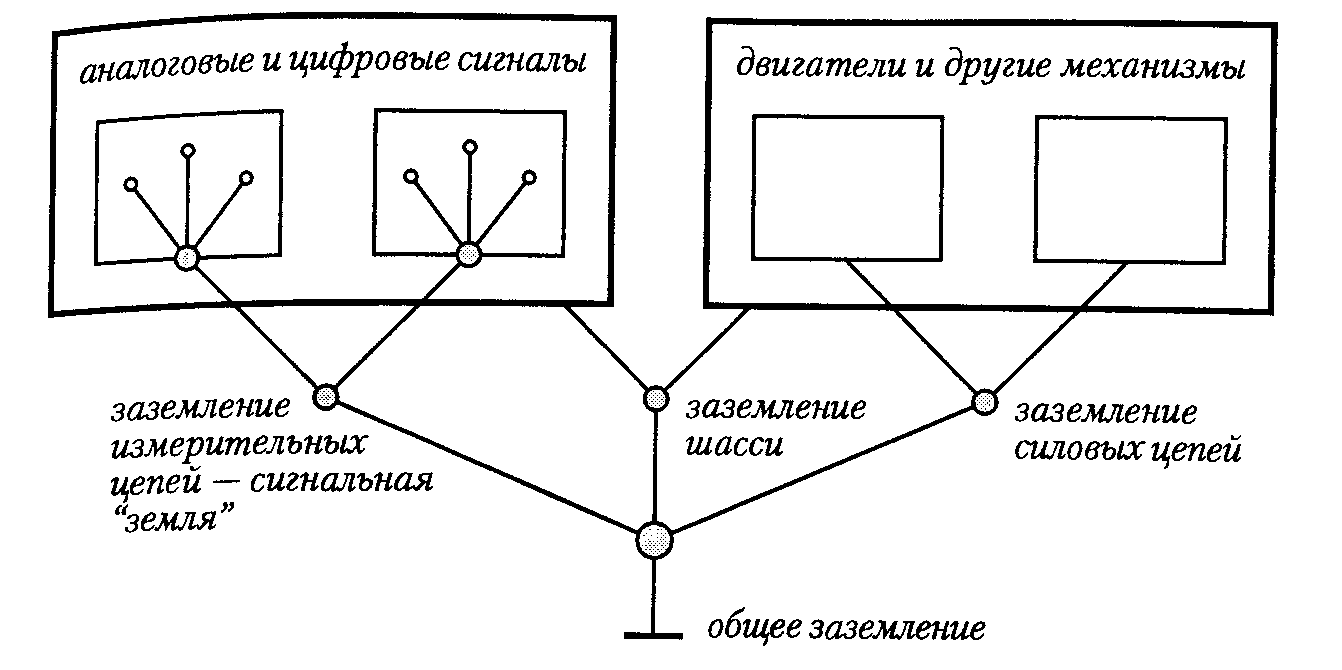
Заземление для различных компонентов системы.
Еще одно правило заземления: Цифровые и аналоговые цепи должны прокладываться и заземлятся раздельно так как, когда цифровая система меняет свое логическое состояние, то на заземлении появляются значительные всплески напряжения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
