

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
найти значение U(i) = U(i-1) + ?U(i) и выдать его на исполнительный механизм;
продолжить эту последовательность действий, начиная со второго пункта;
5.3.2 Устойчивость системы
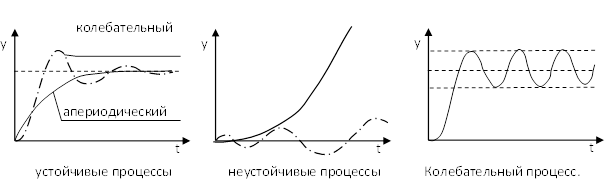
Важным показателем АСР является устойчивость, поскольку основное ее назначение заключается в поддержании заданного постоянного значения регулируемого параметра или изменении его по определенному закону. Регулятор воздействует на систему таким образом, что ликвидирует это отклонение. Если система в результате этого воздействия возвращается в исходное состояние или переходит в другое равновесное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой.
Пусть выходной сигнал звена или системы y(t) рассматривается как сумма двух составляющих y(t) = yуст + уп(t),
где ![]() - и уп(t) – переходная составляющая, равная уп(t) = y(t) – yуст.
- и уп(t) – переходная составляющая, равная уп(t) = y(t) – yуст.
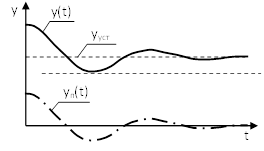
Необходимое и достаточное условие устойчивости формулируется следующим образом: Звено или система называются устойчивыми, если переходная составляющая с течением времени стремится к нулю:
![]() . (То есть весь переходный процесс стремится к установившемуся состоянию). Если уп(t) с течением времени стремится к бесконечности, звено или система называются неустойчивыми.
. (То есть весь переходный процесс стремится к установившемуся состоянию). Если уп(t) с течением времени стремится к бесконечности, звено или система называются неустойчивыми.
Примеры переходных процессов для каждого случая приведены на рисунках
5.3.3 Прямые показатели качества
К ним относятся: степень затухания ?, перерегулирование ?, статическая ошибка ест, время регулирования tp и другие. Рассмотрим их, использую нижеприведенный рисунок переходного процесса
По нему можно понять все определение для установившегося значения выходной сигнала.
![]() .
.

Степень затухания ? определяется по формуле
![]() , где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
, где А1 и А3 - соответственно 1-я и 3-я амплитуды переходной кривой.
Перерегулирование ? = 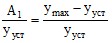
где ymax - максимум переходной кривой.
Статическая ошибка ест = х - ууст, где х - заданная величина.
Время достижения первого максимума tм - определяется по графику.
Время регулирования tp определяется следующим образом: определяется допустимое отклонение ? и строится «коридор» шириной 2?. Время tp соответствует последней точке пересечения y(t) с данной границей. Это есть время, после которого колебания регулируемой величины перестают превышать допустимого отклонения от установившегося значения.
Оптимальные значения времени регулирования, времени достижения первого максимума, перерегулирования и статической ошибки соответствуют минимальным значениям (чем меньше, тем лучше). Степень затухания, наоборот, должна быть максимально большой (максимум ? равен 1).
Современный подход - пространство состояний.
Работу системы управления можно описать словесно. Словесное описание помогает понять принцип действия системы, ее назначение, особенности функционирования и т. д. Однако, оно не дает количественных оценок качества управления, поэтому не пригодно для на хождения характеристик и синтеза систем автоматизированного управления.
Исторически теория автоматического управления (ТАУ) построена на использовании анализ функций комплексной переменной - преобразований Лапласа. Обычно в частотных методах описывается только связь между входными и выходными сигналами. Часть внутренних переменных и связи между ними остаются скрытыми. Описания ОУ имеют меньшую размерность и меньшее число параметров.
Но теряется глубина понимания процессов. Говорят даже о «Черном ящике». Такая модель называется внешним описанием ![]() , в противоположность уравнению состояния.
, в противоположность уравнению состояния.
В настоящее время процессы часто моделируют набором связанных между собой дифференциальных уравнений для баланса энергии, массы, компонентов масс, сил и моментов. Состоянием называется набор всех переменных, производные которых входят в систему дифференциальных уравнений. Если известны текущие значения переменных состояния ( Х0 ) и управляющие сигналы, то можно описать дальнейшее поведение системы. Состояние это вектор – столбец из переменных состояния.
![]() Непосредственно измерить все переменные состояния обычно не удается. Существуют переменные, которые непосредственно не измеряются. Описание в пространстве состояний называют внутренним описанием
Непосредственно измерить все переменные состояния обычно не удается. Существуют переменные, которые непосредственно не измеряются. Описание в пространстве состояний называют внутренним описанием ![]() .
.
4.1 Математические модели в пространстве состояний
Линейная система дифференциальных уравнений для переменных состояния записывается в виде:
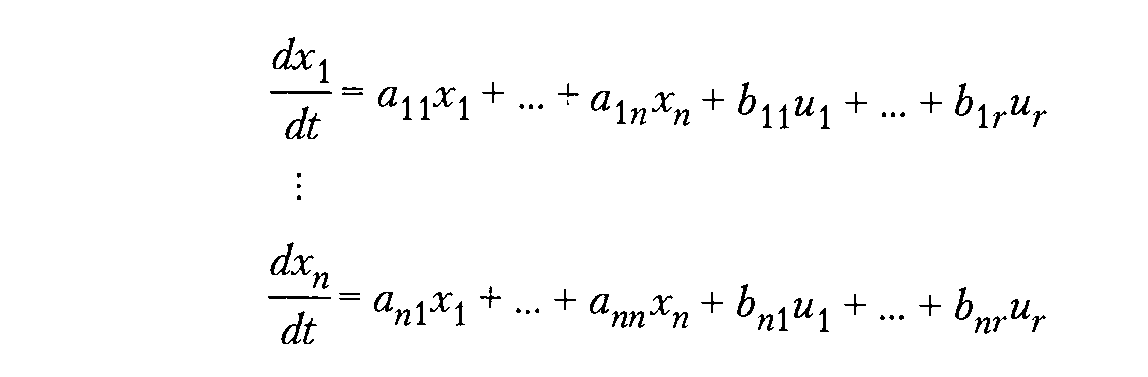
Основу математической модели многомерной системы во временной области составляет векторно-матричная форма записи системы дифференциальных уравнений первого порядка, которая носит название уравнения состояния. Уравнение состояния имеет вид –
| (1) |
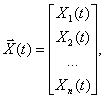
где ![]() — вектор состояния размерности
— вектор состояния размерности ![]() , который включает в себя переменные объекта, однозначно определяющие его состояние,
, который включает в себя переменные объекта, однозначно определяющие его состояние,
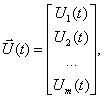
![]() — вектор управления или входа размерности
— вектор управления или входа размерности ![]() , который включает в себя сигналы, действующие на систему извне,
, который включает в себя сигналы, действующие на систему извне,
![]() — матрицы параметров, включающие в себя параметры системы, размерность которых соответственно
— матрицы параметров, включающие в себя параметры системы, размерность которых соответственно ![]() ,
,
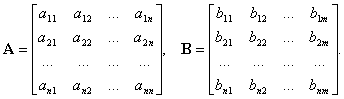
![]() — порядок системы.
— порядок системы.
Иногда уравнение состояния (1) записывают в развернутой форме –
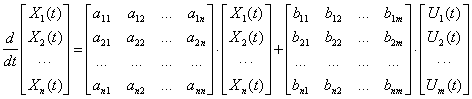 .
.
Уравнение состояния и структура полностью описывают объект управления, вектор состояния содержит переменные объекта, которые однозначно описывают его состояние.
В реальных системах многие компоненты состояния не могут быть измерены или наблюдаемы с помощью датчиков. Эту ситуацию разрешает введение дополнительного уравнения выхода, которое определяет те переменные, которые доступны для наблюдения (на выходе системы) –
| (2) |
где ![]() — вектор выхода размерности
— вектор выхода размерности ![]() , который содержит переменные объекта, доступные для наблюдения,
, который содержит переменные объекта, доступные для наблюдения,

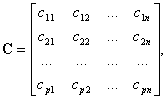
![]() — матрица параметров размерности
— матрица параметров размерности ![]() –
–
в системах управления ![]()
Уравнение выхода (2) также можно записать в развернутой форме
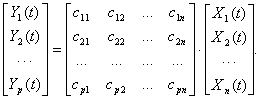
Выходные величины – измерения, обозначаются через Y1, Y2,…Yp и составляют вектор столбец
![]() . Выходные переменные величины классической теории остались, но с состояниями они связаны своей системой уравнений.
. Выходные переменные величины классической теории остались, но с состояниями они связаны своей системой уравнений.
Графически уравнение состояния и уравнение выхода могут быть представлены в виде, показанном на рис.
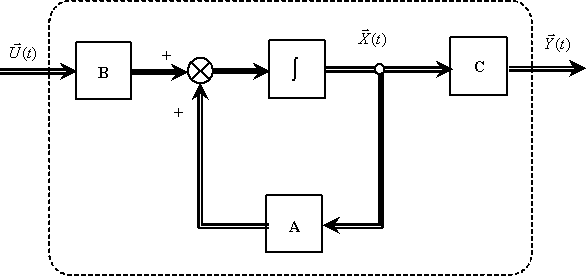
Обычно число измеряемых величин Р меньше числа переменных состояния N и требуется творчески исследовать ОУ для нахождения для дополнительной информации.
Управляющие входные сигналы, которые влияют на переменные состояния и которые может изменять человек - оператор процесса. Это переменные управления U.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
