
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Геометрические размеры модели взяты из правил устройства вертикальных цилиндрических стальных резервуаров для нефти и нефтепродуктов ПБ .
УЛУЧШЕНИЕ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК
РАЗРЕЗНОГО СТЕРЖНЯ ГОПКИНСОНА-КОЛЬСКОГО
, ,
ИМСС УрО РАН, Пермь
Построение определяющих соотношений теории пластичности предполагает исследование процессов высокоскоростного деформирования различных материалов. Уравнение состояния материала должно описывать поведение материала при всех возможных значениях скорости деформации. В диапазоне скоростей деформации ![]() наиболее общим стандартным экспериментальным оборудованием является разрезной стержень Гопкинсона-Кольского [1-2]. Отклики датчиков легко пересчитываются в импульсы деформации с помощью калибровочных коэффициентов, которые должны быть определены в результате динамической калибровки.
наиболее общим стандартным экспериментальным оборудованием является разрезной стержень Гопкинсона-Кольского [1-2]. Отклики датчиков легко пересчитываются в импульсы деформации с помощью калибровочных коэффициентов, которые должны быть определены в результате динамической калибровки.
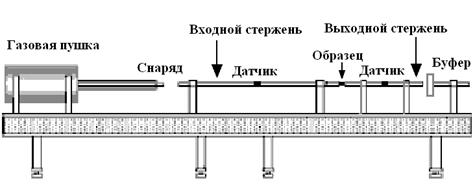
Рис. 1. Разрезной стержень Гопкинсона-Кольского.
Обычный разрезной стержень Гопкинсона-Кольского состоит из входного и выходного стержней, между которыми помещается образец в форме диска (Рис.1). Снаряд разгоняется газовой пушкой, взаимодействует с торцом входного стержня и передает в него импульс упругого сжимающего напряжения. Часть импульса проходит в образец, а часть отражается от последнего, и образец пластически деформируется вследствие разницы в площадях поперечных сечений и механических свойств стержня и образца.
Теория обычного разрезного стержня Гопкинсона-Кольского использует одномерный волновой анализ. Скорость деформации и напряжение в образце определяются через отраженный ![]() и прошедший
и прошедший ![]() импульсы деформации следующими соотношениями:
импульсы деформации следующими соотношениями:
![]() ,
,
![]() ,
,
где и – площади поперечных сечений стержня и образца, соответственно, ![]() – мгновенная длина образца,
– мгновенная длина образца, ![]() – модуль упругости стержня, и
– модуль упругости стержня, и ![]() – скорость звука в стержне.
– скорость звука в стержне.
При видимой простоте основных соотношений метода Кольского, существуют трудности при проведении самого эксперимента. Тензорезисторы, используемые обычно для измерения деформации, работают в динамических условиях, не соответствующих регламентируемым производителями, и поведение клеевой подложки непредсказуемо. Наряду с очень высокими скоростями переноса импульса упругих напряжений, на которые реагируют Тензорезисторы, процессы в стержнях характеризуются весьма невысокими массовыми скоростями (порядка 10м/с). Для измерения скорости последних предлагается использовать датчик электромагнитного типа. Датчик представляет собой виток, находящийся в перпендикулярном поверхности стержня постоянном магнитном поле и прикрепленный своей частью к некоторому сечению стержня. Реакция электромагнитного датчика ![]() пропорциональна массовой скорости, тогда напряжение в образце записывается в виде
пропорциональна массовой скорости, тогда напряжение в образце записывается в виде
 ,
,
где ![]() – калибровочный коэффициент, для определения которого были проведены динамические калибровки электромагнитного датчика при 9 различных скоростях снаряда (в диапазоне от 6.9 м/с до 17.8 м/с). На Рис.2 приведен типичный отклик электромагнитного датчика, на Рис.3 представлены результаты динамических калибровок и их линейная аппроксимация. Стержни и снаряд изготовлены из стали 18ХГТ, скорость звука в них с=5050 м/с, длина снаряда L=144.8 мм.
– калибровочный коэффициент, для определения которого были проведены динамические калибровки электромагнитного датчика при 9 различных скоростях снаряда (в диапазоне от 6.9 м/с до 17.8 м/с). На Рис.2 приведен типичный отклик электромагнитного датчика, на Рис.3 представлены результаты динамических калибровок и их линейная аппроксимация. Стержни и снаряд изготовлены из стали 18ХГТ, скорость звука в них с=5050 м/с, длина снаряда L=144.8 мм.
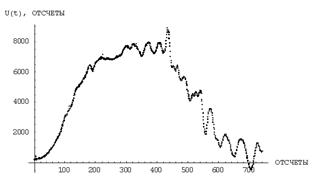
Рис. 2. Отклик электромагнитного датчика.
Среднее значение отклика электромагнитного датчика Umed (Рис.2) вычислялось по формуле  , где T – продолжительность импульса нагружения,
, где T – продолжительность импульса нагружения, ![]() .
.
Рис. 3. Зависимость ![]() от скорости снаряда.
от скорости снаряда.
Получена линейная зависимость среднего значения отклика электромагнитного датчика от массовой скорости в виде Umed=bvc, b=1800 (![]() – скорость снаряда). Теперь калибровочный коэффициент для импульса, полученного с помощью электромагнитного датчика, запишется в виде
– скорость снаряда). Теперь калибровочный коэффициент для импульса, полученного с помощью электромагнитного датчика, запишется в виде
 ,
,
где ![]() – максимальная массовая скорость.
– максимальная массовая скорость.
Таким образом, в работе показано, что применение датчика массовой скорости электромагнитного типа значительно облегчает процедуру численного расчета диаграмм напряжение-деформация, при этом сквозная калибровка измерительной системы гарантирует достаточную точность полученных экспериментальных результатов.
Литература
1. Исследование механических свойств материалов при больших скоростях нагружения // Механика. – Вып.4. – М.: ИЛ, 1950. – C.108-128.
2. Поведение материалов при высоких скоростях деформации // Динамика удара. – М.: Мир, 1985. – С.198-256.
ВЯЗКОЕ РАЗРУШЕНИЕ СТЕРЖНЕЙ В УСЛОВИЯХ
ПОЛЗУЧЕСТИ
Институт гидродинамики им. СО РАН,
Новосибирск
Исследуется процесс вязкого деформирования вплоть до разрушения стержней с прямоугольным поперечным сечением при растяжении постоянным усилием в трехмерной постановке. Примером простейшей одномерной модели «вязкого» (т. е. сопровождающегося большими деформациями) разрушения является модель Н. Хоффа [1, 2]. Концепция Хоффа имеет ограниченный характер, однако при решении ряда практических задач дает результаты, хорошо согласующиеся с опытными данными [2-4].
Хоффа. Рассматривается растяжение цилиндрического стержня длины l и поперечного сечения S постоянным усилием F. В начальный момент времени ![]() имеем
имеем ![]() ,
, ![]() . Из условия несжимаемости
. Из условия несжимаемости ![]() . Предполагается, что скорость деформации
. Предполагается, что скорость деформации ![]() связана с напряжением
связана с напряжением ![]() степенной зависимостью
степенной зависимостью ![]() , где
, где ![]() – коэффициенты ползучести. Интегрируя последнее уравнение, с учетом начальных условий получаем
– коэффициенты ползучести. Интегрируя последнее уравнение, с учетом начальных условий получаем
 где
где  . (1)
. (1)
Время разрушения ![]() определяется из условия
определяется из условия ![]() (или
(или ![]() ). Очевидно, что
). Очевидно, что
![]() . (2)
. (2)
Трехмерная постановка. Для решения задачи растяжения стержня постоянным усилием в трехмерной постановке используется метод конечных элементов. Рассматривается два вида граничных условий на торцах растягиваемого стержня (ось Z направлена вдоль оси стержня, оси X и Y лежат в плоскости поперечного сечения) :
1. «Свободные торцы». Точки на торцах свободно смещаются в направлениях X и Y, для исключения смещения стержня как жесткого целого задано  . Перемещения в направлении оси Z на одном из торцов нулевые, а точки другого торца смещаются в направлении Z компланарно
. Перемещения в направлении оси Z на одном из торцов нулевые, а точки другого торца смещаются в направлении Z компланарно ![]() . Этот случай эквивалентен «растяжению по Хоффу», когда длина бесконечно увеличивается, а площадь поперечного сечения по всей длине стремится к нулю. Схематично изменение формы представлено на рис. 1 (каркас соответствует начальному моменту времени).
. Этот случай эквивалентен «растяжению по Хоффу», когда длина бесконечно увеличивается, а площадь поперечного сечения по всей длине стремится к нулю. Схематично изменение формы представлено на рис. 1 (каркас соответствует начальному моменту времени).
2.  «Защемленные торцы». Перемещения точек на торцах в направлениях X и Y равны нулю
«Защемленные торцы». Перемещения точек на торцах в направлениях X и Y равны нулю  ,
,  . Перемещения в направлении оси Z такие же, как и в случае «свободных торцов»
. Перемещения в направлении оси Z такие же, как и в случае «свободных торцов»![]()
![]() . В процессе такого деформирования образуется утонение стержня или «шейка», рис. 2.
. В процессе такого деформирования образуется утонение стержня или «шейка», рис. 2.
Для расчетов в трехмерной постановке использовался программный комплекс ANSYS. Вычисления были проведены для стержня с размерами поперечного сечения 10´20 мм длины ![]() мм из сплава AK4-1T. Константы ползучести
мм из сплава AK4-1T. Константы ползучести ![]() ,
, ![]() соответствуют температуре T=200°С. Растягивающее усилие
соответствуют температуре T=200°С. Растягивающее усилие ![]() кгс. В расчетах используется логарифмическая мера деформации. Компоненты скоростей деформаций ползучести есть
кгс. В расчетах используется логарифмическая мера деформации. Компоненты скоростей деформаций ползучести есть ![]() где
где ![]() – интенсивность напряжений,
– интенсивность напряжений, ![]() – компоненты девиатора напряжений, индексы
– компоненты девиатора напряжений, индексы ![]() .
.
На рис. 3 представлены результаты расчетов. Сплошная линия 1 соответствует зависимости, определяемой формулой (1), т. е. решение задачи по Хоффу в одномерной постановке. Пунктирная линия 2 и штриховая линия 3 – численный расчет методом конечных элементов в трехмерной постановке с граничными условиями 1 и 2 соответственно. Отличие времени разрушения вычисленного согласно (2) от времени разрушения, полученного для моделей в трехмерной постановке, составляет не более 3% (это можно видеть на рис.3). Как показывают расчеты, процессы быстрого удлинения стержня со «свободными торцами» и активного образования шейки для стержня с «защемленными торцами» наблюдаются на последней стадии вблизи времени разрушения, а до этой стадии общее удлинение стержней для обоих моделей на одни и те же моменты времени близко по значению. Линия 4 на рис.3 соответствует решению задачи растяжения стержня с указанными выше характеристиками и размерами в геометрически линейной постановке. Длина стержня в этом случае определяется как  .
.
На рис.2 изображены изолинии интенсивности напряжений в стержне на момент разрушения. Добавим, что в рассмотренных моделях никаких критериев ограничивающих уровень напряжений использовано не было. Тем не менее, полученные численные результаты служат дополнительным подтверждением правомерности использования модели Хоффа и ее хорошим согласованием в ряде случаев с экспериментальными данными.
Работа выполнена при финансовой поддержке программы INTAS (грант № ).
Литература
1. Hoff N. J. The necking and rupture of rods subjected to constante tensile loads // J. Appl. Mech., 1953, 20, № 1, 105-108.
2. Качанов разрушения в условиях ползучести // Проблемы механики сплошной среды: Сб. науч. тр. / Изв. АН СССР, М., 1961, 186-201.
3. Кац и разрушение труб под действием внутреннего давления // Изв. АН СССР., Отд. техн. наук, 1957, №10, 86-89.
4. , , О времени вязкого разрушения призматических стержней в условиях ползучести при растяжении // Теоретическая и прикладная механика: ауч.-техн. сб./ Харьков: «Основа», 2003, вып.37, С.125-129.
ЭКСПЕРИМЕНТАЛЬНОЕ И ЧИСЛЕННОЕ ИЗУЧЕНИЕ
АВТОКОЛЕБАТЕЛЬНОЙ КОНЦЕНТРАЦИОННОй КОНВЕКЦИИ ВБЛИЗИ БОКОВОЙ ПОВЕРХНОСТИ ПУЗЫРЬКА ВОЗДУХА
В ГОРИЗОНТАЛЬНОМ СЛОЕ ЖИДКОСТИ
Р. В. Бирих1, А. Л. Зуев2, К. Г. Костарев2, Р. Н. Рудаков3
1 Пермский гос. педагогический университет, Пермь, Сибирская, 24.
2 Институт механики сплошных сред УрО РАН, Пермь,
Академика Королева, 1.
3 Пермский гос. технический университет, Пермь,
Комсомольский пр., 29а.
Эксперименты по изучению концентрационно-капиллярной конвекции (КК конвекции) демонстрируют ее заметное отличие от термокапиллярной конвекции (ТК конвекции). Это отличие в первую очередь связано с большими значениями диффузионного числа Прандтля. Механизм выхода поверхностно-активного вещества (ПАВ) на границу раздела фаз отличается от механизма формирования температуры границы. Кроме того, граница раздела, рассматриваемая как отдельная фаза, обладает инерционными свойствами и вдоль поверхности раздела возможен конвективный перенос ПАВ и его поверхностная диффузия. Эти факторы приводят к появлению новых КК явлений, не имеющих ТК аналогов.
Так, в наших экспериментах [1–2] было обнаружено развитие периодического КК течения, возникавшего в окрестности неподвижного воздушного пузырька в водном растворе ПАВ с вертикальным градиентом концентрации. Пузырек находился в тонком горизонтальном слое жидкости и имел форму цилиндра со свободной боковой поверхностью. Колебательный режим течения формировался регулярным возникновением интенсивной Марангони конвекции, выравнивающей концентрацию ПАВ у поверхности пузырька. Период и время существования колебаний определялись начальным градиентом концентрации, средней концентрацией раствора, его физико-химическими свойствами и размерами пузырьков.
С целью объяснения механизма возникновения колебательных режимов структура и эволюция конвективных течений, поля концентрации ПАВ вокруг пузырька были исследованы более детально [3]. Экспериментальная кювета представляла собой протяженный прямоугольный канал высотой 2 мм и толщиной 1.2 мм, заключенный между двумя вертикальными плоскопараллельными стеклами. Канал заполнялся вертикально стратифицированным по концентрации водным раствором метилового, этилового или изопропилового спирта и с одного из концов был перекрыт пузырьком. Благодаря малой толщине канала возникавшие течение и распределение концентрации ПАВ были близки к двумерным, что позволяло исследовать их структуру с помощью интерферометра Физо.
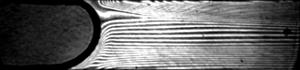
Было замечено взаимодействие двух различных конвективных механизмов. Один из них был связан с интенсивной конвекцией Марангони, переносившей ПАВ по свободной поверхности пузырька и быстро затухавшей вследствие выравнивания поверхностной концентрации ПАВ в результате перемешивания раствора вблизи пузырька. Второй был обусловлен действием архимедовых сил, которое проявлялось в относительно медленном глобальном течении жидкости в объеме полости за счет всплытия жидкости с высокой концентрацией ПАВ. Это адвективное течение восстанавливало нарушенную у поверхности пузырька стратификацию раствора. Как только это происходило, цикл развития интенсивного концентрационно-капиллярного течения начинался снова. На рис. 1 приведены типичные интерферограммы поля концентрации изопропилового спирта вблизи поверхности пузырька в момент медленного гравитационного течения (левый снимок) и интенсивной Марангони конвекции (правый снимок). В работе были измерены временные зависимости периода колебаний и вертикального градиента концентрации, определены критические числа Марангони и Грасгофа, при которых появляется колебательный режим конвективного движения.
|
| |
Рис. 1. Типичные интерферограммы концентрационного поля изопропилового спирта вблизи поверхности пузырька в различные моменты времени цикла колебания. |

Наблюдаемое явление было численного промоделировано на модели конвекции с диффузионным выносом ПАВ на поверхность пузырька (без формирования поверхностной фазы) с большими значениями числа Шмидта [4]. Для простоты рассматривалась вытянутая в горизонтальном направлении прямоугольная полость, одна из вертикальных границ которой моделировала поверхность пузырька, а на другой задавалась концентрация ПАВ. Горизонтальные границы предполагались непроницаемыми для ПАВ. Поскольку в экспериментах начальное поле концентрации было достаточно сложным, были рассмотрены два варианта начального распределения ПАВ в объеме — с вертикальным и горизонтальным градиентами концентрации. Полная система уравнений концентрационной конвекции в переменных функция тока, вихрь и концентрация решалась методом конечных разностей на квадратной сетке. Граничные условия для вихря скорости на твердых границах записывались по формуле Тома, а на поверхности пузырька — из условия равенства касательных напряжений. Коэффициент поверхностного натяжения полагался линейно зависящим от концентрации ПАВ. В численном эксперименте для больших значений числа Марангони и больших диффузионных времен вычислялись нестационарные распределения концентрации и поля функции тока. В случае вертикального градиента после переходного режима устанавливалось двухвихревое течение с отдельной локализацией гравитационной и капиллярной конвекций.
При горизонтальном начальном градиенте концентрации на фоне относительно медленной гравитационной конвекции, переносящей ПАВ к поверхности пузырька воздуха, периодически наблюдалось интенсивное концентрационно-капиллярное течение. Это движение выравнивало концентрацию ПАВ у границы раздела фаз, и Марангони конвекция затухала. Продолжительность интенсивной конвекции составляла около 1/10 периода колебаний. Максимальное значение функции тока в процессе колебаний изменялось почти на два порядка. На рис. 2 показаны изолинии концентрации (левый кадр) и функции тока (правый кадр) в фазе интенсивной Марангони конвекции.
|
| |
Рис. 2. Типичные изолинии концентрации и функции тока. |
Для области с отношением сторон 1:2 наблюдалось 5 колебаний с постепенно убывающими периодом и амплитудой, что достаточно хорошо отражает эксперимент.
Работа выполнена при поддержке Российского фонда фундаментальных исследований, грант № .
Литература
1. Зуев А. Л., Костарев -капиллярная конвекция вблизи поверхности пузырька в горизонтальном слое неоднородного раствора жидкостей // Конвективные течения. Вып. 1. Пермь: ПГПУ, 2003. С. 123-139.
2. Kostarev K. G., Zuev A. L., Viviani A. Oscillatory Marangoni convection around the air bubble in a vertical surfactant stratification // J. Comptes Rendus Mecanique. 2004. V. 332, № 1. С. 1-7.
3. Зуев А. Л., Костарев изучение конвективных автоколебаний вблизи боковой поверхности пузырька воздуха в плоском прямоугольном канале // Конвективные течения. Вып. 2. Пермь: ПГПУ, 2005. С. 198–215.
4. Бирих Р. В., Рудаков моделирование конвективных автоколебаний в прямоугольной области с вертикальной свободной границей // Конвективные течения. Вып. 2. Пермь: ПГПУ, 2005. С. 26–35.
ОБ АНАЛОГИИ УРАВНЕНИЙ ПЛОСКОГО ТЕЧЕНИЯ ГАЗА
И АНТИПЛОСКОЙ ДЕФОРМАЦИИ ТЕЛА
Новосибирский государственный университет, Новосибирск
Исследование ряда актуальных проблем упругости приводит к необходимости учета больших деформаций тела и отклонения его поведения от закона Гука. В этих условиях линейная теория упругости не обеспечивает требуемой точности и должна быть заменена нелинейной теорией, учитывающей геометрическую и физическую нелинейности.
Рассмотрим в этом аспекте антиплоское деформирование изотропного цилиндрического тела с учетом действия потенциальных сил на основе нелинейной модели несжимаемого тела, которую составляют уравнения равновесия, закон Мурнагана, зависимость упругого потенциала от базисных инвариантов деформации, выражений инвариантов через компоненты деформации и компонентов – через перемещения и условие несжимаемости. В переменных актуального состояния 
 поперечные,
поперечные, ![]() продольная координаты) эти соотношения имеют вид [1]:
продольная координаты) эти соотношения имеют вид [1]:

 (1)
(1)

где ![]() лагранжев множитель, упругий и силовой потенциалы,
лагранжев множитель, упругий и силовой потенциалы, ![]() - инварианты деформации,
- инварианты деформации,  - компоненты перемещения, напряжений Коши и деформаций Альманси,
- компоненты перемещения, напряжений Коши и деформаций Альманси, ![]() - символ Кронекера (индексы принимают значения 1,2,3, по повторяющемуся индексу проводится суммирование).
- символ Кронекера (индексы принимают значения 1,2,3, по повторяющемуся индексу проводится суммирование).
Примем, что для цилиндра сечения S с контуром L, подверженного антиплоской деформации [2] , заданы упругий и силовой потенциалы, боковая нагрузка ![]() и продольная составляющая
и продольная составляющая ![]() результирующей торцевой нагрузки
результирующей торцевой нагрузки
![]() (2)
(2)
 (3)
(3)
Согласно (1), (2) деформации нелинейно представляются через перемещение (геометрическая нелинейность) и могут быть выражены через две независимые компоненты ![]() , связанные между собой дифференциальным условием совместности
, связанные между собой дифференциальным условием совместности
 (4)
(4)
Инварианты деформации неположительны, представимы через линейный инвариант и удовлетворяют условию несжимаемости. Упругий потенциал выражается через линейный инвариант, и закон Мурнагана дает квазилинейную зависимость напряжений от деформаций (физическая нелинейность ) и давления q, допускающую представление через давление и независимые деформации :
![]()
![]() (5)
(5)

Ввиду (1) ![]() и перемещение через деформации представляется квадратурой, в которой интеграл в силу (4) не зависит от пути интегрирования, а аддитивная постоянная определяется задаваемым перемещением в граничной точке
и перемещение через деформации представляется квадратурой, в которой интеграл в силу (4) не зависит от пути интегрирования, а аддитивная постоянная определяется задаваемым перемещением в граничной точке
 . (6)
. (6)
Тем самым напряжения (5) и перемещение (6) определяются давлением и независимыми деформациями. Давление из первого и второго уравнений равновесия в (1) представляются через силовой и упругий потенциалы интегралом, постоянная интегрирования в котором вычисляется по интегральному условию в (3)
![]() (7)
(7)
Независимые деформации определяются нелинейной системой уравнений, состоящей из третьего уравнения равновесия в (1) и условия совместности деформаций (4)
 (8)
(8)
Уравнениям (8) соответствует характеристический определитель [3]
![]() .
.
Когда ![]() имеет противоположный с
имеет противоположный с ![]() знак (или равена нулю), характеристическое уравнение G = 0 не имеет вещественных корней. В этих случаях система (8) эллиптического типа, и для нее корректна краевая задача с заданными граничными деформациями.
знак (или равена нулю), характеристическое уравнение G = 0 не имеет вещественных корней. В этих случаях система (8) эллиптического типа, и для нее корректна краевая задача с заданными граничными деформациями.
Условие эллиптичности выполнено, в частности, для квадратичного потенциала Ривлина – Сондерса, моделирующего большие упругие деформации несжимаемых резиноподобных материалов [2]
 . (9)
. (9)
При слабой физической нелинейности, когда в потенциале (9) коэффициент при квадратичном члене существенно меньше коэффициента при линейном, будем иметь
![]() . (10)
. (10)
Граничные усилия в (3), представленные в естественных осях контура L (нормали n, касательной t и бинормали b )


 ,
,
определяют ограничение на нагрузку ( первое равенство ) и граничные значения независимых деформаций
![]() , (11)
, (11)
![]() .
.
Для квадратичного потенциала (9) соотношение для ![]() является кубическим уравнением, имеющим единственное вещественное решение
является кубическим уравнением, имеющим единственное вещественное решение
 . (12)
. (12)
![]() .
.
При слабой физической нелинейности выражение (12) можно линеаризовать по этому малому параметру и представить величины ![]() в виде
в виде
 . (13)
. (13)
Таким образом, краевую задачу для независимых деформаций при квадратичном упругом потенциале и слабой физической нелинейности составляют уравнения (8) и краевые условия (11), (13). Соотношения задачи не содерждат силового потенциала, поэтому влияние потенциальных сил сказывается на давлении (7) и не сказывается на деформациях.
Уравнения равновесия и совместности деформаций при антиплоской деформации упругости (8) в случае слабой нелинейности потенциала (10) аналогичны уравнениям неразрывности и отсутствия вихря и следствию интеграла Бернулли для плоского безвихревого установившегося течения идеального баротропного газа (при дозвуковой скорости) [4]
 . (14)
. (14)
Деформациям ![]() и потенциалу
и потенциалу ![]() упругого тела в (8) соответствуют скорости
упругого тела в (8) соответствуют скорости![]() и плотность
и плотность ![]() газа в (14). Аналогия позволяет использовать аналогичные методы при решении соответствующих задач упругости и газодинамики.
газа в (14). Аналогия позволяет использовать аналогичные методы при решении соответствующих задач упругости и газодинамики.
Список литературы
1. , Берри теория упругости. М.: Физматгиз, 1961.
2. Лурье теория упругости. М.: Наука, 1980.
3. Петровский об уравнениях с частными производными. М.: Физматгиз, 1961.
4. , Шабат теории функций комплексного переменного. М. : Наука, 1973.
моделирование движения опорно-двигательного
аппарата человека
, ,
Тульский государственный университет, Тула.
При моделировании движений человеческого организма опорно-двигательный аппарат (ОДА) удобно представить в виде системы криволинейных стержней. Их объединение в единую систему осуществляется путем наложения кинематических связей – приравниванием характеристик движения. В рассматриваемом случае, когда система стержней, моделирующая ОДА, стыкуется по суставам, кинематические связи сводятся к приравниванию глобальных координат суставов и их линейных скоростей; угловые координаты и скорости остаются свободными, т. е. допускаются взаимные повороты отдельных элементов ОДА. Кроме этого, следует учесть, что суставы обладают сопротивлением повороту за счет мышц, соединяющих кости. Следовательно, помимо чисто кинематических связей следует учесть и действие внутренних моментов.
Пусть задано движение начала связной системы координат одного стержня, т. е. узла 1. Тогда движение узла 2 определяется известной [1] формулой распределения скоростей в абсолютно твердом теле:
![]() ( 1)
( 1)
где r2 – вектор места узла 2 в связанной системе координат. Верхний индекс обозначает номер стержня в системе. Но, так как узел 2 есть начало связанной системы координат для второго тела, то характеристики линейного перемещения оказываются известными. У тела 2 свободными будут только движения, связанные с поворотами, а именно, угловая скорость и параметры Родрига – Гамильтона. Тогда установление кинематической связи между двумя суперэлементами сводится к исключению из системы уравнений движения второго тела трех уравнений для линейных скоростей и замене их на три уравнения, которые получаются проектированием ( 1) на оси связанной системы координат первого тела. При этом следует учесть, что связанные системы координат первого и второго тела, вообще говоря, различны, т. к. разрешены взаимные конечные повороты. Тогда необходим пересчет из системы координат первого тела во вторую. Для этого можно было бы воспользоваться взаимной матрицей направляющих косинусов; однако вместо этого воспользуемся тем фактом, что скорость инвариантна по отношению к земной системе координат. Тогда кинематическое условие связи можно записать в виде:
![]() , ( 2)
, ( 2)
где выражение в скобках определено в системе координат первого тела, матрицы А1 и А2 – матрицы направляющих косинусов первого и второго стержней по отношению к земной системе координат. Отметим, что применение условия (2) обуславливает связь уравнений движения обеих тел, так как в определение матриц направляющих косинусов входят параметры Родрига – Гамильтона обеих тел.
Для учета жесткости суставов примем, что момент в суставе пропорционален разности векторов поворота двух сопрягаемых стержней, которые выражаются через параметры Родрига-Гамильтона [1]:

 ( 3)
( 3)
Учитывая, что векторы поворота определены в двух связных системах координат, приведем их к единой неподвижной системе, умножая на матрицы направляющих косинусов:
![]() ( 4)
( 4)
Постулируем линейную связь между вектором момента и вектором взаимного поворота:
![]() , ( 5)
, ( 5)
где тензор К – тензор жесткости сустава, определяемый экспериментально.
Помимо указанных ограничений следует учесть и ограниченную подвижность сустава: по достижении определенного экспериментально значения угла взаимного поворота сустав «стопорится» и запрещаются взаимные повороты. Тогда из системы уравнений следует исключить и угловые скорости второго тела и приравнять их угловым скоростям первого стержня. Это приводит к нелинейности релейного типа в правой части уравнений движения. Для решения такой задачи решение следует разделить на этапы. На первом этапе решается система уравнений с ограничениями вида ( 2), (5), причем контролируются углы взаимного поворота. По достижении предельного угла решение останавливается, исключаются уравнения углового движения второго тела, и решение продолжается при одинаковых угловых и линейных скоростях обоих тел. Отметим, что если в ходе решения появится составляющая угловой скорости, уменьшающая угол взаимного поворота, то следует снова «освободить» угловые скорости второго тела, т. е. вернуться к исходной системе уравнений.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
