


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Выходы кросс корреляции можно использовать для вывода кодовой псевдодальности на L2 и фазы, образуя
![]() (3)
(3)
и
![]() , (4)
, (4)
где нижние индексы в кодовых дальностях ![]() и фазах
и фазах ![]() показывают, что они получены через измерения С/А-кода сигнала L1.
показывают, что они получены через измерения С/А-кода сигнала L1.
Корреляция по кодам с методом квадратирования является улучшенным методом квадратирования. Он включает корреляцию принятого Y кода сигнала L2 с локально созданной копией P кода. Эта корреляция возможна потому, что Y код происходит из сложения по модулю два P кода и W кода (кода шифрования). Поскольку тактовая частота W кода почти в 20 раз меньше частоты Y кода, то всегда существуют участки Y кода, которые идентичны соответствующим участкам исходного P кода. Поэтому копия P кода смещается таким образом, чтобы совместить участки Р кода с участками Y кода сигнала от спутника. После корреляции применяется низкочастотный фильтр посредством сужения полосы пропускания, а затем сигнал квадратируется, чтобы избавиться от кода. Этот метод обеспечивает кодовую дальность и фазу на половинной длине волны. Этот метод менее восприимчив к помехам, в нем меньше потери в SNR.
Метод Z-слежения – это улучшенный полубескодовый метод. В этом методе Y код на сигналах L1 и L2 раздельно коррелируется с созданной в приемнике копией P кода. Поскольку корреляция производится раздельно, то W код получается на каждой частоте и затем удаляется из сигнала. Удаление кода шифрования приводит к таким же сигналам, что и без режима Anti-Spoofing. Таким образом, получаются кодовые дальности и фазы несущей на L1 и L2 с полной длиной волны. Заметим, что Y-кодовые псевдодальности имеют такую же точность, что и Р-кодовые псевдодальности.
Все методs восстановления несущей L2 при наличии режима Anti-Spoofing страдают от последующего ухудшения в отношении сигнал-шум. Без исключения, никакой бескодовый или полубескодовый метод не восстанавливают информацию сигналов GPS, как метод корреляции по кодам. Кроме того, чем слабее сигнал, тем он более чувствителен к ионосферной активности и помехам, которые могут вызывать потерю захвата.
Разрешение многозначности (неоднозначности) фазы. Многозначность фазы – это целое число длин волн, укладывающихся в расстоянии от спутника до фазового центра антенны приемника. Если многозначность удается разрешить, то это эквивалентно измерению расстояния с миллиметровым уровнем точности. Разрешение неоднозначности при длине волны в 20 или 24 см, соизмеримой с точностью определения ряда параметров уравнения наблюдений, таких как ионосферные и тропосферные задержки, многопутность и др., является чрезвычайно трудной задачей, без решения которой недостижима точность, соответствующая уровню шума измерений фазы. Многозначность уверенней разрешается, если имеются измерения P(Y)-кодовых псевдодальностей, что сужает объём поиска.
Разрешение многозначностей фаз несущей выполняется в программном обеспечении для обработки спутниковых наблюдений и является процессом, определяющим точность измерений. В процессе разрешения анализируются остаточные невязки в измеренных фазах, координатах или в самих неоднозначностях. Разработано около 20 методов разрешения многозначности, их можно разделить на три группы.
В первой группе методов используются свойства геометрии засечки пункта. При обработке данных фазы несущей от многих эпох постоянно изменяющаяся геометрия используется для нахождения наилучшего положения приемника. Эти методы работают достаточно хорошо, но зависит в значительной мере от движения спутника, а поэтому занимает время для достижения сходимости решения.
Во второй группе методов используется фильтрация. Здесь усредняются независимые измерения для того, чтобы найти оцененное положение с самым низким уровнем шума.
В третьей группе методов используется поиск через диапазон возможных целых комбинаций, и затем вычисляют одну с наименьшей невязкой.
Во всех методы поиска и фильтрации широко применяются методы статистического тестирования. Эти методы не могут оценить правильность отдельного решения, но могут вычислить вероятность, данную определенными условиями, что ответ находится в указанных пределах. Наконец, большинство программ GPS обработки используют некоторые комбинации всех трех идей. Все эти методы сужают область путем начала оценки исходной позиции, обеспеченной кодовыми измерениями [Антонович 2006].
7. Сравнение наблюдений псевдодальности и фазы несущей
Мы рассмотрели общие принципы измерений спутниковым приемником по сигналам американской системы GPS в ее современном состоянии. Измерения по сигналам системы ГЛОНАСС отличаются тем, что выполняются на разных диапазонах частот для каждого спутника. Это приводит к определенным затруднениям при обработке фазовых наблюдений.
Псевдодальности. Это расстояния между спутником и приемником, искаженные погрешностями часов спутника и приемника, влиянием атмосферы и другими источниками ошибок. Псевдодальности могут измеряться по стандартному коду ГЛОНАСС (C/A код в системе GPS) или коду повышенной точности (P код в GPS). Измерения псевдодальностей производятся мгновенно и могут выполняться с большой частотой. Каждое измерение не связано с остальными измерениями. Псевдодальности, измеренные на частотах L1 и L2 отличаются между собой из-за различия в ионосферных задержках. Шум наблюдений для псевдодальности по P(Y) коду составляет несколько дециметров, псевдодальность по C/A коду – наиболее грубая, её шум около 3 м. Применение узкополосных корреляторов в геодезических приемниках снижает уровень шума почти на порядок.
Наблюдения фазы несущей. Наблюдения фазы представляют отсчеты по счетчику циклов (целая фаза) с добавлением дробной части. Геометрически это соответствует измерению разности начального и текущего расстояния между спутником и приемником. Наблюдения фазы должны производиться непрерывно, блокирование сигналов приводит к потересчета циклов непрерывной фазы. Восстановление потерь счета циклов в наблюдении фазы является сложной задачей, особенно когда их много. В отличие от кодовых измерений каждое наблюдение фазы взаимосвязано с остальными измерениями данного спутника. При сохранении постоянного захвата сигнала спутника появляется возможность производить высокоточные кинематические измерения.
Все наблюдения фазы для одного спутника содержат одну и ту же начальную целочисленную многозначность. Фазовые наблюдения имеют пренебрежимо малый шум, обычно порядка одного миллиметра.
Наблюдения фазы на разных частотах могут быть сильно коррелированными из-за особенностей обработки фазы при освобождении от зашифрованного P кода, или могут относиться к фазе с половинной длиной волны (в приемниках с квадратурной обработкой сигнала).
8. Антенны
Типы антенн. В ГНСС аппаратуре применяется несколько конструкций антенн, но сигналы спутников имеют настолько низкую плотность мощности, особенно после прохождения через атмосферу, что эффективность антенны очень важна. Антенны могут быть запроектированы для приема только частоты L1 или обеих частот L1 и L2, для одной системы, скажем GPS, или для нескольких систем. Антенна должна быть чувствительной к сигналам, имеющим правостороннюю круговую поляризацию.
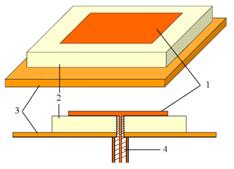
Большинство изготовителей ГНСС приемников используют микрополосковую антенну (рис. 12). Она образована двумя проводниками 1 и 3, разделенными диэлектриком 2. Верхний проводник – излучатель антенны, нижний – заземленная плоскость, 4 - выходная линия передачи. Микрополосковая антенна может принимать в двух диапазонах частот. Такая антенна прочна, компактная, имеет малую массу и размеры, простую конструкцию и низкий профиль.

а б
Рис. 12. Схема устройства микрополосковой антенны (а) и ее внешний вид (б).
Полосковый проводник располагается над металлической заземленной плоскостью на месте, соответствующем точке возбуждения круговой поляризации. Размеры излучателя подбираются близкими к половине длины волны. Две металлические пластины, полосковый проводник и заземленная плоскость, образуют резонатор электромагнитных колебаний, которые излучаются в верхнюю полусферу над излучателем.
Реже применяются антенны виде спиралей или завитков. На рис. 6 показаны кваадрифиллярная и геликальная антенны. Такие антенны имеют хорошую диаграмму направленности, им не нужен отсекатель, но они не являются азимутально симметричными и имеют высокий профиль.
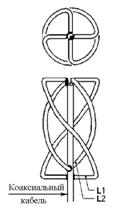
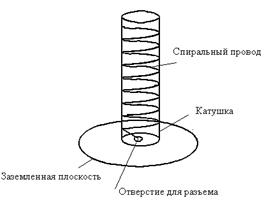
Рис. 13. Квадрифиллярная (слева, вид сверху и сбоку) и геликальная антенны.
ГНСС антенны должны принимать сигналы от спутников разных систем GPS, ГЛОНАСС, Галилео, COMPASS. Для этого они должны охватывать диапазон частот от 1.164 до 1.610 ГГц. Важно также, чтобы такие широкодиапазонные антенны имели фазовые центры, устойчивые к пространственным и частотным изменениям.
Другое важное свойство ГНСС антенн – их невосприимчивость к многопутности или способность противостоять влиянию переотраженных сигналов. Многопутность возникает, когда на антенну поступает прямой сигнал и сигнал, отраженный от какого-либо предмета, что приводит к значительному ухудшению качества измерений. Один из приемов защиты от многопутности реализован в антеннах с заглушающими кольцами choke ring (рис. 14).



а б в
Рис. 14. Микрополосковые антенны с экраном choke ring: а. компании Trimble Navigation; б. компании NovAtel (антенна GNSS-750); в. та же антенна с обтекателем.
Антенна компании Trimble Navigation имеет плоский экран, состоящий из четырех концентрических колец одинаковой высоты, расположенных вокруг антенного элемента на заземленном основании. Промежутки между кольцами (желобки) почти не оказывают влияния на прямой сигнал, но большое влияние на отраженный сигнал, идущий снизу. Электромагнитное поле отраженных сигналов вокруг заземленного основания антенны представляет сумму полей первичных и вторичных волн. Заземленное основание антенны гасит первичный и вторичный сигнал. Плоская кольцевая антенна оказывает влияние только на отдельную частоту, которая имеет резонансный режим.
Антенна GNSS-750 имеет трехмерный конический кольцевой экран choke ring (рис. 7б). Кольца экрана имеют различную высоту и равномерные прорези по окружности каждого кольца, смещенные относительно прорезей соседних колец. Такая конструкция экрана позволяет повысить качество отслеживания сигналов спутников, расположенных близко к горизонту в отличие от плоского экрана. В антенне GNSS-750 используется ультраширокополосный антенный элемент Dorne Margolin, который является стандартом точности и стабильности фазового центра антенны. Параметры колец экрана антенны оптимизированы для совместного применения с большинством существующих приемников ГНСС геодезического класса [Янкуш, Андреева 2008].
Многие типы антенн, применяемые на постоянно действующих станциях, имеют защиту от снега и дождя, а также от птиц в виде обтекателей конической или сферической формы (рис. 14в), изготовленные из радио прозрачной пластмассы [Евстафьев, 2009].
Фазовый центр антенны. Диаграмма направленности коэффициента усиления антенны должна обеспечивать обзор почти по всей верхней полусфере. Но обычно делают обзор не на всю полусферу, потому что в большинстве геодезических применений происходит фильтрация сигналов от самых малых высот, чтобы уменьшить влияние многопутности и атмосферных задержек, которые для малых высот определяются менее уверенно. Кроме того, контуры равных фаз вокруг электрического центра антенны, то есть фазового центра сами не являются идеально сферическими (рис. 15), поскольку характеристики диаграммы направленности оказываются различными в разных направлениях верхней полусферы. Это явление приводит к несовпадению электрического фазового центра, от которого приемник производит измерения расстояний до спутников, с геометрическим (называемым также механическим или физическим) центром антенны, положение которого фиксируется относительно марки геодезического пункта. При наблюдении нескольких спутников для каждого из них на каждой частоте подразумевается свой фазовый центр. Заметим, что для идеальной (изотропной) антенны изменения фазового центра (phase center variations, PCV) равны нулю.
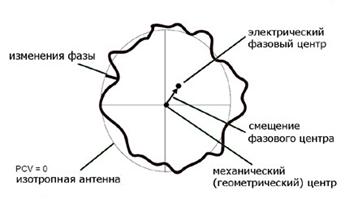
Рис. 15. Фазовый и геометрический центры антенны [www. stadtentwicklung. berlin. de/internationales_eu/.../gnss/3_2_Schmitz. pdf].
Ориентировка антенны и измерение ее высоты. В процессе измерений в антенне существует целое облако виртуальных фазовых центров. Если на обоих концах базовой линии используются антенны одного типа и одного изготовителя, то действительное положение фазового центра обычно не столь важно, нужно только измерять высоту над маркой геодезического центра для одних и тех же точек снаружи антенн и ориентировать антенны в одном направлении. Для этого изготовители снабжают свои антенны опорными марками на корпусе антенны, чтобы их можно было устанавливать в одном азимуте, обычно на север. Если на базовой линии или в сети используются смешанные антенны разного изготовления или модели, то в этом случае в программном обеспечении для обработки данных необходимо иметь таблицы поправок в плане и по высоте для фазовых центров антенн по отношению к опорным точкам на антеннах или проходящим через них горизонтальным плоскостям (antenna reference point, antenna reference plane, ARP). В качестве опорных точек используют низ корпуса антенны (bottom of antenna mount), или черту на ее ребре и др. Эта информация зарисовывается и заносится в журнал наблюдений. Поправки к фазовому центру получают в процессе калибровки антенн. В настоящее время калибровки проводятся в специализированных службах в США и Германии.
Влияние изменений в положении фазового центра на точное геодезическое позиционирование является очень важным. Особенности пункта наблюдений, длина сеанса наблюдений, ориентировка антенны, частота – все может влиять на определяемые координаты антенны. Максимальная величина влияния в плане может достигать нескольких миллиметров, а по высоте – до 10 см.
9. Программное обеспечение
Используемые для обработки спутниковых наблюдений программы принято делить на коммерческое программное обеспечение, поставляемое производителями спутниковой аппаратуры, и многоцелевое научное программное обеспечение, которое происходит от разработчиков из научных организаций. Программы первой группы предназначены преимущественно для обработки данных от приемников определенного типа. Однако передовые пакеты принимают данные также через интерфейс формата RINEX (Receiver Independent Exchange – независимый обмен между приемниками). Как правило, математические модели этих продуктов в большинстве случаев пользователю недоступны. Коммерческие программы подходят для повседневной геодезической работы. Обычно они предлагают большое разнообразие возможных применений и могут достаточно легко управляться персоналом со средним уровнем инженерного образования в области спутниковых технологий. В некоторых случаях основная программа включает только решение базовых линий, а для уравнивания сети необходимо дополнительное программное обеспечение. Обычно этот вид программ позволяет делать обработку статических и кинематических измерений.
Из коммерческих программ в России наиболее распространенными являются:
· Trimble Geomatics Office (TGO) и Trimble Business Center (TBC) американской компании Trimble Navigation,
· SKI-Pro и Leica Geosystems Office компании Leica Geosystems,
· Pinnacle компании Javad,
· Topcon Tools компании Topcon Positioning Systems и др.
Разработка общецелевой системы для пост-обработки GPS представляется сложной задачей. Она требует несколько человеко-лет разработки и состоит из большого числа индивидуальных программ. Обычно эти программные пакеты не ограничиваются использованием одного типа приемников, а принимают данные от большого разнообразия геодезической аппаратуры. Эти пакеты в большинстве случаев служат для
· профессионального стандартного использования в небольших сетях для быстрой обработки,
· профессионального использования в высокоточных измерениях, а также на больших расстояниях,
· научного использования в исследованиях и образовании, и
· для обработки данных и научных исследований, включая геодинамические исследования и обработку массивов постоянно действующих станций.
Кроме стандартных опций быстрой обработки эти виды программных пакетов предлагают многие виды особых альтернатив для научной обработки. Очень важны интерактивные операции. Некоторые пакеты включают опции для определения орбит или для оценивания атмосферных моделей.
Научная обработка требует массу опыта и глубокое понимание сигналов GPS и поведение ошибок. Обработка данных особенно трудна, когда данные заражены ионосферными нарушениями, и когда требуется наивысшая точность на большом расстоянии по шумным данным. Математические модели научных программных пакетов общего назначения в большинстве случаев хорошо задокументированы и обсуждаются в научной литературе. В некоторых случаях пользователь имеет доступ к исходным модулям и может делать модификации или вставлять новые части. Считается, что в научных программах моделирование явлений выполняется на уровне точности в 1 мм, в то время как в коммерческих программах – 5 мм.
В настоящее время примерами программ второй группы являются:
· BERNESE – разработана в Университете Берна, Швейцария,
· · программа GAMIT GLOBK, разработанная в Массачусетском институте технологий, США;
· GEONAP – разработана в Университете Ганновера, Германия,
· GIPSY-OASIS II – разработана в Лаборатории реактивного движения, США.
Нужно заметить, что в отличие от коммерческих программ, использование перечисленных программ может потребовать значительного вклада времени, чтобы понять программу и как наилучшим образом ее использовать при различных обстоятельствах.
Известно несколько других программ, но они имеют тенденцию ограничиваться институтами, где были написаны. К ним можно отнести программы PAGES (Национальная геодезическая служба США), GRAPE (Институт прикладной астрономии, Россия).
Некоторые программы допускают обмен файлами решений базовых линии либо в формате фирмы-разработчика, либо в едином формате SINEX (Solution Independent Exchange – независимый обмен решениями) [Антонович 2005, 2006].
10. Точность и поверки спутниковой аппаратуры
Можно выстроить следующую примерную шкалу спутниковых приемников в зависимости от их возможностей:
- кодовый приемник для навигации по стандартному коду GPS или ГЛОНАСС,
- кодовый приемник для навигации по точному коду GPS или ГЛОНАСС,
- кодо-фазовый приемник (с неполным разрешением фазы),
- фазовый одночастотный приемник,
- фазовые двухчастотные (или трехчастотные) приемники, работающие по одной или нескольким ГНСС.
Кодовая аппаратура обеспечивает уровень точности порядка 1-10 м и для точных геодезических работ непригодна. Кодо-фазовые приемники обеспечивают дециметровый уровень точности и могут применяться для топографических съемок, кадастра и т. п.
Паспортная точность измерений фазовой спутниковой аппаратурой обычно характеризуется средними квадратическими погрешностями измерения расстояний между пунктами sD (или погрешности определения планового положения) и погрешности измерения разности геодезических высот sН, которые состоят из постоянной части и части, зависящей от расстояния D:
![]() , (5)
, (5)
![]() . (6)
. (6)
Постоянный член можно рассматривать, например, как ошибку центрирования или ошибку измерения высоты антенны (соответственно влияние в плане и по высоте). С теоретической точки зрения, остаточные тропосферные и ионосферные ошибки и ряд других ошибок сказываются на результатах позиционирования величиной, которая возрастает с увеличением длины базовой линии.
Для современных геодезических спутниковых приемников величина a составляет 3 – 5 мм, а величина b - 1×10-6 – 0.5×10-6. Погрешности для высоты, как правило, в два раза больше. Кроме того, приведенные погрешности относятся к методу наблюдений, который принято называть «статикой». В этом методе приемники находятся неподвижно, накапливая данные в течение длительного времени. Однако существуют и другие методы, такие как быстрая статика, кинематика стой-иди, непрерывная кинематика, в которых погрешности измерений будут значительно больше из-за того, что некоторые погрешности наблюдений не будут исключаться.
Характерно, что точность одночастотной и двухчастотной аппаратуры практически одинаковая. Преимущество двухчастотной аппаратуры в том, что она пригодна для наблюдений на длинных базовых линиях, то есть на расстояниях в тысячи километров. Одночастотная аппаратура обеспечивает точность на расстояниях 10 – 15 км и лишь иногда – до 30 км.
Реальная точность наблюдений будет ниже, если перед началом полевых измерений не выполнить поверку аппаратуры. Для ГНСС измерений обычно достаточно поверить оптический центрир, с помощью которого антенна устанавливается над центром знака. Визирная ось центрира при выведенном на середину пузырьке уровня должна совпадать с отвесной линией. Методика этой поверки хорошо известна геодезистам, и мы не будем на ней останавливаться. Дополнительные ошибки может вызывать люфт переходника в трегере, несоосность удлинителя для установки антенны и переходника. При выполнении высокоточных работ эти источники ошибок должны непременно устраняться. Если при наблюдениях используется бипод или бинога (веха с подставками), то для нее также необходимо делать поверку круглого уровня.
Чтобы убедиться в исправности приемника можно выполнить один простой тест, это – нулевая базовая линия. Это измерение делается, когда два или больше приемников подсоединяются к одной антенне [Антонович 2005].
Комплект аппаратуры должен иметь свидетельство о метрологической поверке, подтверждающее паспортные данные прибора (аппаратуры) на период полевых работ, которая выполняется в специализированных службах.
Список литературы
Антонович спутниковых радионавигационных систем в геодезии [Текст] : в 2 т. – М. : Картоцентр, Новосибирск : Наука. – 2005. – 334 с. – 2006. – 360 с.
Болдин, навигационная спутниковая система ГЛОНАСС [Текст] / , , и др. Под ред. , , . – 2-е изд., исправ. – М.: ИПРЖР, 1999. – 560 с.
Генике, спутниковая система определения местоположения GPS и ее применение в геодезии [Текст] / , . – М.: Картоцентр: Геодезиздат, 1999. – 272 с.
Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейс. контрол. док. (редакция 5.0) [Электронный ресурс] – М.: Координац. науч.-информ. центр ВКС России, 2002. – 57 с.– Режим доступа: http://www.glonass-center.ru
Евстафьев, инфраструктура ГНСС для точного позиционирования [Текст] / . – М. : «Проспект», 2009. – 48 с.
Конин системы и технологии. [Электронный ресурс] / . – 2006. – 245 с. – Режим доступа: www. /user/905294/
Серапинас в ГЛОНАСС и GPS измерения: Учеб. пособие. / – Ижевск: Удм. гос. ун-т, 1999. – 93 с.
Соловьев, навигация и ее приложения./ .– М. : Эко-Трендз. – 2003. – 326 с.
Янкуш антенна ГНСС NovAtel GNSS-750 [Текст] / , // Геопрофи. – 2008. – № 6. – С. 35 – 37.
Hofmann-Wellenhof, B. GNSS - Global Navigation Satellite Systems GPS, GLONASS, Galileo and more [Text] / B. Hofmann-Wellenhof, H. Lichtenegger, E. Wasle – Wien, New-York: Springer. – 2008. – 516 p. – Англ.
Grewal, M. S. Global Positioning Systems, Inertial Navigation, and Integration [Text] / M. S. Grewal, L. R. Weill, A. P. Andrews. – New York, Chichester, Weinheim, Brisbane, Singapore, Toronto: John Willey & Sons, Inc. – 2001. – 392 p. – Англ.
Interface Control Document ICD-GPS-200C. 10 Oct. 19Jan. 2003 – 198 p. – Англ. – [Electronic resource]. – Режим доступа: http://www. navcen. uscg. gov/pubs/ gps/icd200/default. htm
Leick A. GPS Satellite Surveying [Text] / A. Leick. - New York: A Willey-Interscience Publication. – 19p. - Англ.
ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СПУТНИКОВЫХ ТЕХНОЛОГИЙ
Техническое обеспечение спутниковых технологий состоит из СРНС, сигналы которых непосредственно участвуют в спутниковых измерениях и других спутниковых систем, которые являются вспомогательными, спутниковой аппаратуры пользователей и другого технологического оборудования (компьютеры, стандарты частоты, метеостанции, штативы, рулетки и т. д.).
Изначально СРНС разрабатывались для координатно-временного обеспечения военных действий. Эти системы управляются министерствами обороны и полный набор возможностей систем доступен только военным (авторизованным) пользователям. Для гражданских пользователей не доступны точные сигналы. Более того в любой момент времени для гражданских пользователей может быть включен режим загрубления сигнала.
СРНС по охвату территории могут быть как глобальными (GNSS) так и региональными. К глобальным следует отнести ныне действующие системы Американскую GPS (Глобальная спутниковая система позицианирования) и Российскую ГЛОНАСС (Глобальная навигационная спутниковая система), а также спутниковые системы, которые в настоящее время прошли испытания и будут введены в эксплуатацию в ближайшие 2-3 года GALILEO (Европейская) и KOMPASS (Китайская). Данные GNSS предназначены для надежного, высокоточного, независимого от времени суток и расположения на земном шаре определения координат и времени.
К региональным следует отнести ныне действующую Китайскую систему БАЙДОУ.
Принцип эксплуатации данных спутниковых систем состоит в том, что каждый спутник системы непрерывно передает сигналы строго определенного вида, несущие информацию о времени и положении спутника в пространстве. Специальный приемник этих сигналов принимает и декодирует информацию от спутника, измеряет расстояние до него, находит из обработки свое положение и точное время.
Каждая спутниковая система:
· Передает сигналы, которые в отличие от наземных систем могут быть приняты на очень большой площади, в любом месте земного шара, на земле, в воздухе, или на море.
· Эти сигналы проходят сквозь облака, дождь и стекло, но не принимаются в помещении (если только спутник не виден в окне).
· Системы можно использовать днем и ночью, в течение того времени, пока передающий спутник находится над горизонтом пользователя.
· СРНС представляют данные 3-х мерного позиционирования, обеспечивая точность от нескольких метров до нескольких миллиметров (в зависимости от метода работы).
· Системы работают 24 часа в сутки, но достигаемая в разное время точность зависит от количества доступных спутников и их расположения относительно наблюдателя.
Вспомогательные же спутниковые системы (WAAS, EGNOS, OmniStar и другие) служат для решения определённых ведомственных задач, но могут использоваться и для решения задач позицианирования.
GNSS состоит из трех подсистем:
- Подсистема космических аппаратов (ПКА): состоит из самих спутников с передатчиками сигналов, необходимых для работы системы. Подсистема Контроля и Управления (ПКУ): наземные средства, выполняющие задачу наблюдения за спутниками, вычисление орбит, телеметрии и ежедневный контроль необходимый для управления Подсистемой космических аппаратов. Подсистема Аппаратуры Пользователей (ПАП): целый спектр оборудования и вычислительной техники, которая обеспечивает пользователей результатами позиционирования.
Подсистема космических аппаратов выполняет следующие функции:
· Прием и хранение данных, передаваемых ПКУ.
· Поддержание точного времени посредством нескольких бортовых атомных стандартов частоты.
· Передача информации и сигналов пользователю на одном или на обоих L - диапазонах частоты.
Подсистема космических аппаратов СРНС состоит из созвездия спутников на высоких круговых орбитах и космодромов, с которого они запускаются. Созвездие спутников GPS при полном развертывании системы состоит из 24 спутников, обеспечивающих непрерывное присутствие от 4 до 8 спутников выше 15 над горизонтом в любой точке земного шара. Спутники располагаются в 6 орбитальных плоскостях с наклонением 55 . Высота полета спутников 20000 км, период обращения 11h58m. Большая высота полета обеспечивает возможность наблюдения спутников с большой территории и исключает трудно прогнозируемое влияние атмосферы. На спутнике располагаются приемо-передатчики, атомные часы (четверо), управляющий процессор и разнообразное вспомогательное оборудование. Эти спутники окончательно сформировали систему в современном виде: 21 основной спутник + 3 вспомогательных + 4 резервных. На спутниках реализованы режимы SA и AS (загрубления и шифрования данных) для несанкционированных пользователей.
В ПКА ГЛОНАСС также входит созвездие из 24 спутников, расположенных в трех орбитальных плоскостях. Плоскости орбит разнесены по долготе на 120 . В каждой плоскости находится по 8 спутников. Наклон орбиты к экватору равен 64.8 , период обращения Р=11h 15m. Это обеспечивает повторение трассы на земной поверхности через неделю, точнее, через 7 суток 23 часа 27 минут и 28 секунд спутник проходит по небу точно на том же самом месте.
Таблица 1. Сравнительные характеристики GNSS
Характеристики | GPS | ГЛОНАСС | GALILEO |
Ответственное ведомство | Министерство транспортного строительства | Росавиокосмос | Европейское космическое агенство |
Год ввода в эксплуатацию | 1995 | 1996 | 2012 |
Проектное количество спутников | 24 | 24 | 30 |
Количество спутников на начало 2009 | 30 | 18 | 6 |
Проектный срок эксплуатации спутников (лет) | 7,5 | 5 | 9 |
Масса спутников (кг) | 580-970 | ||
Число орбитальных плоскостей | 6 | 3 | 6 |
Наклонение орбиты | 55° | 64.8° | 56° |
Высота полета над Землей (км) | 20183 | 19100 | 23700 |
Период обращения | 11h57m58s | 11h15m | 11h58m |
Представление орбиты | Модифицированные Кеплеровы элементы a,e,i,W,w,tp | Геоцентрические координаты и их производные
| Модифицированные Кеплеровы элементы a,e,i,W,w,tp |
Система отсчета | WGS-84 | ПЗ-90 | ITRS |
Метод разделения сигналов | кодовый | частотный | кодовый |
Несущие частоты (МГц) | L1=1575.42 | L1= | Е1=1575.42 |
L2=1227.60 | L2= | Е6=1278.75 | |
Дополнительные частоты (МГц) | L1С=1575.42 | Е5А=1176.45 | |
L2С=1227.60 | Е5В=1207.14 | ||
L5=1176.45 | Е6=1278.75 | ||
Отношение полезного сигнала к шуму (ДБ) | 21.6 | 48 | 58,3 |
Каждый спутник GPS передает уникальный навигационный сигнал на двух частотах L диапазона электромагнитного спектра: L1 на частоте 1575.42 МГц и L2 на частоте 1227.60 МГц. На этих микроволновых частотах сигналы являются высоко направленными и, следовательно, они легко блокируются, а также отражаются твердыми телами и водной поверхностью. Сигналы легко проходят через облака, но могут блокироваться плотной или влажной листвой. Сигналы спутников состоят из (см. рис. 1):
- двух несущих волн L-диапазона.
- дальномерных кодов, которыми модулируются несущие волны.
- навигационного сообщения.

Рис. 1. Структура сигнала GPS.
Подсистема Контроля и Управления состоит из средств необходимых для контроля за состоянием спутников, телеметрии, наблюдения, командования и контроля, вычисления эфемерид и связи. ПКУ NAVSTAR состоит из Главной станции управления ГСУ, 5 контрольных станций КС, и трех станций засылки данных (рис. 2).
Они выполняют следующие функции:
- контроль работы космических аппаратов,
- сбор данных для определения орбит,
- закладка данных в процессоры спутников,
- формирование системного времени.
Рис. 2. Схема функционирования подсистемы контроля и управления
Географически все станции расположены в 5 пунктах земной поверхности. В Колорадо Спрингс (США) располагается ГСУ (Master Control Station) и станция слежения, на островах Вознесения в Атлантике, Диего Гарсия в Индийском океане и атолле Кваджалейн в Тихом океане - станции засылки и слежения. Еще одна станция слежения расположена на Гавайях. Станции слежения регулярно наблюдают навигационные спутники системы с применением стандартной аппаратуры и передают данные на ГСУ. Здесь результаты проходят полную обработку, производится уточнение орбиты и ее экстраполяция на некоторое время вперед. Полученные данные передаются на станции засылки, откуда не реже одного раза в сутки направляются на спутник.
В дополнение к оперативному определению орбит существует несколько возможностей использования точных орбит. Они могут быть получены со станций наблюдений сети SIGNET или Международной геодинамической GPS-службы.
ПКУ ГЛОНАСС действует подобным образом. Станции наблюдений располагаются под Москвой, в Енисейске, Комсомольске-на-Амуре и на Балхаше [ ]. Разработана и действует на станциях Аппаратура Контроля Навигационного Поля (АКНП) [ ].
6 Подсистема аппаратуры потребителей
Аппаратура потребителей различается по архитектуре, назначению, точности, стоимости и другим параметрам.
Специальные GPS приемники используются для приема и расшифровки GPS сигналов и представления результатов пользователю в приемлемой форме. Характеристики приемника зависят от применения, для которого он был запроектирован. Приемники общего пользования, предназначенные для наземной навигации или плавания, обычно будут иметь жидкокристаллический дисплей и цифровой выход через порт RS-232. Приемники, предназначенные для коммерческих авиалиний, обычно должны иметь порт данных для интегрирования с системой воздушной навигации и будут способны вычислять относительную скорость по принимаемой информации. Военные приемники могут расшифровывать вторую частоту, чтобы получать более высокую точность отдельного приемника, чем у гражданского приемника.
Типы приемников по методу действия
Кодовые приемники. Эти приемники определяют положение, обрабатывая информацию, содержащуюся в коде, который передается спутниками. Преимущество этого метода в его низкой стоимости. Недостатком является сравнительно низкая точность – порядка 5 м или хуже.
Фазовые приемники. Эти приемники определяют положение путем обработки измерений фазы несущей волны, наблюдаемой в течение некоторого времени. У них не нужно декодировать переданную информацию, за исключением данных о положениях спутников. Некоторые такие приемники не имеют возможности принимать коды вообще, в этом случае приемник должен предварительно загружаться данными из другого источника. Преимущество этого метода – его высокая точность. Такие приемники могут обеспечивать сантиметровый уровень точности даже в реальном времени, когда используются дифференциальные поправки. Недостаток – их высокая стоимость.
Типы приемников по их применению
Ручные приемники общего назначения. Навигационные приемники наиболее простые и дешевые. Они обеспечивают определение координат в абсолютном режиме, в реальном времени. Они могут быть одно - и многоканальными, одно - и двухчастотными, работающими по GPS или ГЛОНАСС'у, или по обеим системам. Они обеспечивают данными невысокой точности, порядка 10-15 м в лучшем случае. Эти приемники характеризуются малыми размерами и портативностью, питаются от батарей и имеют встроенный дисплей. Дисплей обычно на жидких кристаллах, имеет низкое потребление питания и может быть либо буквенно-цифровым, либо графическим. Некоторые из этих приемников могут иметь возможность выводить на дисплей авиационные или морские карты с карт данных. Антенна может быть внешней для установки вне средства передвижения.
Приемники для определения ориентировки. Эти приемники используются для определения трехмерного положения объекта относительно Земли. Такие приемники используют несколько антенн, относительное расположение которых должно быть известно.
Авиационные приемники. Эти приемники оптимизированы для применения в авиационной навигации и могут выводить на дисплей навигационные карты. Эти приемники обычно работают совместно с другой аппаратурой воздушного судна (авионикой). Их точность изменяется в зависимости от класса воздушных судов, на которых прибор планируется использовать.
Приемники для навигации автомобилей, информационных систем дорожных средств и управления парками дорожных средств.
Эти приемники устанавливаются на автомашинах, грузовиках, на поездах. Назначение приемников может изменяться в зависимости от применения, но характеристики будут подобными. Приемники, используемые на автомашинах, служат для навигации шофером или для отсылки сообщения в службу спасения (при несчастном случае). GPS приемники, используемые в автобусах, грузовиках и на поездах, предназначаются, главным образом, для отслеживания диспетчерскими службами.
Морские приемники. Эти приемники предназначены для навигации на море, у них есть возможность выводить на экран морские карты и соединяться с другим навигационным оборудованием.
OEM (Original Equipment Manufacturer – Оригинальное оборудование изготовителя).
Такие приемники предназначены для установки на другом оборудовании. Они поступают от изготовителя как стойка с клавиатурой или модуль, без дисплея.
Космические приемники. Эти приемники используются на спутниках, как для навигации, так и для определения ориентировки. Они могут быть защищенными от излучений и иметь специальные программы, позволяющие им работать на высоких скоростях, вызванных орбитальным движением космического аппарата.
Топографические приемники служат для составления карт и сбор данных о местности. Навигационно-топографические приемники обычно имеют точность на уровне от 10 м до 1 дм при расстояниях докм, что достигается дифференциальным режимом работы. Они могут быть кодовыми и кодо-фазовыми. Последние имеют более высокую точность, но ограничены по дальности. Такие приемники оптимальны для сбора данных и пересылки их во внешнюю базу данных. Они часто объединяют умеренную точность автономных определений с возможностью ее повышения дифференциальным методом до 1 м. Их можно использовать вместе с компьютером для сбора и обработки данных. В такие компьютеры можно заранее загружать библиотеку с описанием особенностей объектов съемки, тогда оператору остается выбирать из библиотеки подходящий тип объекта, положение которого определяется. Такие приемники можно нести в руках, у них малые батареи, а антенна крепится к рюкзаку за спиной.
Геодезические приемники. Такие приемники предназначены для высокоточных измерений. Такие приемники должны иметь антенны для установки на штативе и иметь возможность переключать питание в процессе работы.
Постоянно повышающаяся точность аппаратуры стирает грань между навигационно-топографической аппаратурой и чисто геодезической. Фазовые приемники отличаются по числу каналов, они могут быть одно - и двухчастотными, а также работающими по одной или двум СНС. Двухчастотные фазовые приемники наиболее полно обеспечивают все разнообразие возможностей спутниковой аппаратуры и дают наиболее точные результаты на расстояниях до нескольких тысяч километров. Наличие двух частот обеспечивает точный учет влияния ионосферы. Одночастотные фазовые приемники более простые и менее точные, их область применения - построение опорных сетей и землеустройство.
Приемники для определения и хранения времени. Эти приемники позволяют определять время с точностью до наносекунды за счет сравнения собственной шкалы времени, основанной на работе сравнительно дешевых кварцевых или рубидиевых генераторов, со шкалой времени спутников, определяя временную задержку по своему точному положению и орбите спутника.
* определение местоположения в пространстве способом линейной засечки.
* Режим избирательной доступности (S/A – selective availability) является намеренным загрублением сигналов GPS с целью несанкционированного доступа к потенциальной точности определения координат и скорости потребителей, не относящихся к Министерству Обороны США или военным союзникам США. Режимом S/A предусматривается, что точности определения координат с вероятностью 0.95:
в горизонтальной плоскости ±100 м;
в вертикальной - ±156 м, а передача времени с погрешностью ± 340 нс. [ ]
Для загрубления точности применяют способы:
- манипуляция параметрами орбит спутников в навигационных сообщениях (эпсилон-процесс);
- манипуляция частотой посылок меток времени спутников (дельта-процесс).
Обновление фиксированных параметров орбит потребителями проводится обычно через несколько часов, т. е. эпсилон-процесс имеет часовые периоды.
Дельта-процесс влияет на точность системного времени, что искажает точность измерения псевдорасстояния, особенно по коду С/A, а также проявляется в доплеровских измерениях, лежащих в основе вычисления скорости потребителя. Поэтому для реализации S/A режима в настоящее время применяют дельта-процесс, генерируемый каждым спутником отдельно. Эти сигналы между спутниками не коррелируются. Для снижения влияния S/A режима прорабатываются и делаются попытки использовать различные модели спектральной плотности сигналов дельта-процесса, однако в полной мере эти подходы не дают удовлетворительных результатов.
*) Иногда давление измеряется в мм. рт. ст. (1015мб = 760мм. рт. ст.).
*) При использовании частоты f1=1227.6 МГц значение TU необходимо умножить на величину f1× f2=1.65;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
