


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для работы с программой необходимо иметь файл альманаха или эфемерид, создаваемые по навигационным сообщениям спутников. Эти файлы содержит информацию об орбитах и часах всех спутников системы, сведения об их "здоровье" и используется для расчета времени видимости и обеспечения быстрого захвата сигналов приемником. Обычно для планирования применяются эфемериды с "возрастом" до 30 дней, так как за время, прошедшее с момента их сбора до даты наблюдений, на орбитах могут появиться новые спутники, а другие спутники могут выйти из строя или совершить орбитальный маневр. Файлы эфемерид или альманаха загружаются в компьютер из полевого приемника с помощью программы, обслуживающей аппаратуру.
Программа планирования настраивается на предполагаемые условия наблюдений, для чего вводятся следующие данные:
- дата, время наблюдений и примерные координаты района работ,
- угол отсечки по высоте (маска высоты),
- временной сдвиг между местным и всемирным временем, который считается к востоку положительным, к западу – отрицательным,
- диаграмма препятствий на пункте.
Точность задания положения должна быть не грубее 15'. Угол отсечки по высоте, как правило, задается равным 10° для наблюдений с кодовым приемником и 10°-15° для фазовых измерений. Делается отбор спутников, используемых в вычислениях видимости, с учетом информации об их «здоровье».
Программы планирования позволяют получать различные виды информации. Наиболее важными из них являются:
- график количества доступных спутников (Number of Satellites), представляемых с некоторым шагом по времени,
- график видимых спутников (Visible Satellites), где указываются номера спутников и время пребывания их в зоне видимости,
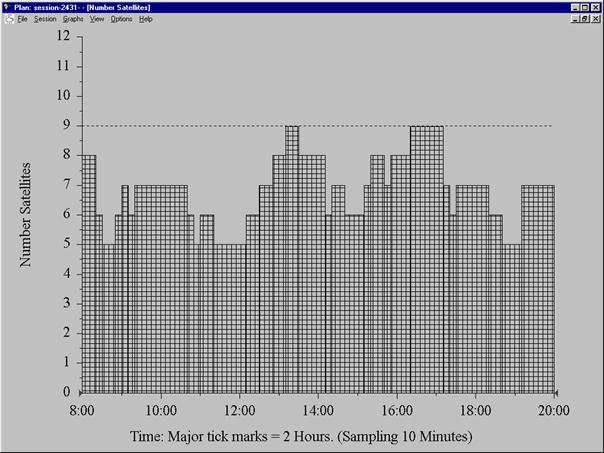 |
Рис. 4.1. График с указанием количества наблюдаемых спутников
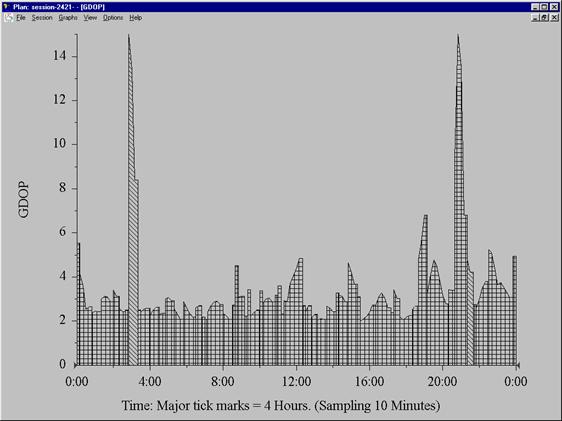
- графики или таблицы геометрических факторов PDOP, GDOP и др.
- диаграммы небесной сферы Skyplot с траекториями спутников.
Примеры выдачи некоторых диаграмм и графиков, полученных по программе GPSurvey фирмы Trimble Navigation [94], даны на рис. 4.1 – 4.3.
На основании анализа полученной информации делается заключение о возможности наблюдений на отдельной станции.
Чтобы убедиться в возможности синхронных наблюдений с двух или большего числа станций, необходимо построить соответствующие графики для каждой станции, участвующей в сеансе и произвести их анализ. Должны выполняться следующие условия:
- число общих спутников на каждой станции достаточное для проведения наблюдений,
- продолжительность видимости минимального числа спутников достаточная,
 |
- геометрические факторы на каждой станции не превышают установленных пределов.
Рис. 4.2. Пример выдачи графика геометрического фактора GDOP
Если пункты располагаются достаточно близко (в пределах 100 км) и не имеют препятствий, то графики для обеих станций будут практически одинаковыми. При большем расстоянии угол отсечки по высоте для полевого приемника увеличивают на 1° при удалении на каждые 100 км от базового приемника.
Наиболее опасная ситуация может возникнуть при использовании аппаратуры, не поддерживающей режим наблюдений All-in-View (наблюдаю «все, что вижу»), когда прогноз дает количество спутников, превышающее число каналов аппаратуры. Если в рабочих созвездиях каждого из приемников число общих спутников будет меньше четырех, то ни кодовые, ни фазовые измерения невозможно будет обработать. В таких ситуациях необходимо либо увеличивать угол отсечки по высоте для обоих приемников, либо исключать из наблюдений некоторые спутники, делая их «недоступными» приемнику.
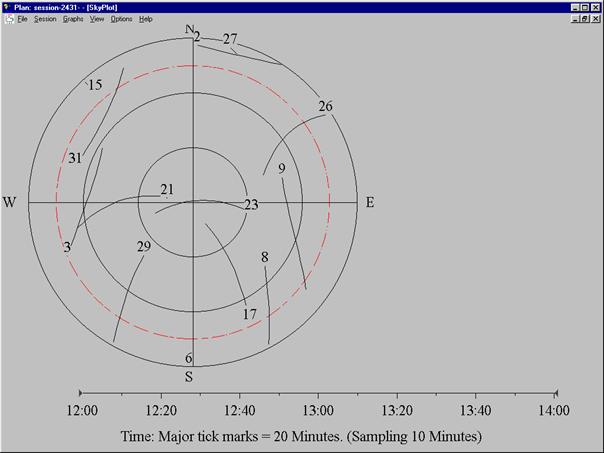 |
Рис. 4.3. Диаграмма небесной сферы (Skyplot) с траекториями спутников
Обычное значение величины геометрических факторов PDOP или GDOP от двух до четырех. Максимальное значение принимается равным 7 для фазовых измерений и 10 – для кодовых измерений. Впрочем, это не является жестким условием, и в зависимости от назначения работ в качестве допустимых могут назначаться иные величины. Весьма важным представляется контроль геометрического фактора VDOP, дающего оценку передачи превышения. Если он равен нулю, то решение базовой линии не будет получено.
Количество расчетов, тип выводимой информации и способ ее представления (диаграммы, графики, таблицы) наблюдатель делает по своему усмотрению. При работе в полузакрытой местности, где много препятствий разного характера, планирование для каждой точки становится обременительным. Тогда можно вывести на печать несколько диаграмм небесной сферы Skyplot (рис. 4.3) с траекториями спутников без препятствий на различные периоды рабочего дня и использовать их на местности либо для отыскания точки с достаточным числом спутников, либо для выбора удобного времени, нанося при этом на диаграмму препятствия.
Если планирование сделано на одну дату, а наблюдения выполняются в другую, близкую дату, то нужно иметь в виду, что взаимное расположение спутников NAVSTAR повторяется на следующие сутки на 4 минуты раньше, у спутников ГЛОНАСС траектории повторяются на восьмые сутки на 32 мин. раньше. Однако при функционировании всех спутников ГЛОНАСС траектории спутников на небесной сфере будут повторяться на следующие сутки на 4 мин. раньше, но принадлежать они будут спутникам, проходившим по орбите в предыдущий день позднее, т. е. имеющим аргумент широты на 45° больше [5, 38, 94, 113].
4.3. Абсолютный метод спутниковых определений
4.3.1. Определение координат по кодовым псевдодальностям
Каждый спутниковый приемник может определять свои координаты, скорость и время по спутникам СРНС независимо от других приемников. Основным параметром, по которому находятся координаты, является псевдодальность, для определения скорости может также использоваться доплеровский сдвиг частоты. Уравнение для измеренной псевдодальности ![]() , полученное в разделе 3.1, приведем в виде:
, полученное в разделе 3.1, приведем в виде:
![]() , (4.5)
, (4.5)
где индекс i относится к спутнику, i = 1, 2, …s, индекс А – к пункту наблюдений. В левой части уравнения приводится псевдодальность, непосредственно измеренная приемником. В правой части находятся: геометрическая дальность ![]() , представляющая собой истинное расстояние между спутником в момент выхода сигнала и антенной приемника в момент приема сигнала,
, представляющая собой истинное расстояние между спутником в момент выхода сигнала и антенной приемника в момент приема сигнала, ![]() и
и ![]() - сдвиги шкал часов (поправки часов) соответственно для приемника и для спутника,
- сдвиги шкал часов (поправки часов) соответственно для приемника и для спутника, ![]() и
и ![]() - ионосферная и тропосферная поправки, dA и di – задержки сигналов в приемнике и на спутнике,
- ионосферная и тропосферная поправки, dA и di – задержки сигналов в приемнике и на спутнике, ![]() - влияние многопутности на трассе распространения сигнала,
- влияние многопутности на трассе распространения сигнала, ![]() - влияние релятивистских и гравитационных эффектов,
- влияние релятивистских и гравитационных эффектов, ![]() - случайные ошибки измерений (шумы), с – скорость распространения электромагнитной волны в вакууме. Все члены уравнений даются в линейной мере.
- случайные ошибки измерений (шумы), с – скорость распространения электромагнитной волны в вакууме. Все члены уравнений даются в линейной мере.
Практическое применение этого уравнения возможно, если в измеренную псевдодальность ввести все поддающиеся учету поправки. Поправки за влияние ионосферы и тропосферы вычисляются в соответствии с моделями, приведенными в главе 3. Модель сдвига часов спутников GPS содержится в навигационном сообщении и выглядит следующим образом:
![]() , (4.6)
, (4.6)
где a0, a1, a2 – коэффициенты полинома, а toc – опорное время (время часов) для коэффициентов. В частности, a0 – сдвиг часов (поправка часов) для эпохи toc, a1 – скорость дрейфа часов (ход часов) в эпоху toc и a2 – половина ускорения часов в эпоху toc. Для спутников ГЛОНАСС в навигационном сообщении ход часов и скорость хода не приводятся.
Задержки сигнала в аппаратуре спутника и в приемнике определяются путем калибровок или вообще не учитываются, т. е. входят в шумы измерений. То же самое происходит с многопутностью сигнала: ее влияние обычно неизвестно.
Гравитационный сдвиг частоты системе GPS компенсируются путем некоторого уменьшения частоты опорного генератора спутника на предвычисленную величину эффекта. Вращение неинерциальных систем отсчета, учитывается при обработке. Остальные релятивистские эффекты учитывают лишь в особых случаях.
Если считать, что в измеренной псевдодальности известные поправки учтены, а неизвестные поправки вошли в шумы, то уравнение (4.5) можно переписать в виде:
![]() . (4.7)
. (4.7)
Геометрическая дальность выражается через радиусы-векторы спутника Ri и станции RA в общеземной системе координат как модуль разности векторов:
![]() . (4.8)
. (4.8)
Координаты спутников ![]() вычисляются по навигационному сообщению на момент выхода сигнала
вычисляются по навигационному сообщению на момент выхода сигнала ![]() , где
, где ![]() - время прохождения сигнала. Для спутников GPS применяется аналитический метод вычислений, для спутников ГЛОНАСС – численное интегрирование (см. раздел 1.12). Из-за того, что векторы положений спутников
- время прохождения сигнала. Для спутников GPS применяется аналитический метод вычислений, для спутников ГЛОНАСС – численное интегрирование (см. раздел 1.12). Из-за того, что векторы положений спутников  задаются в одной из общеземных систем (ПЗ-90, WGS-84), не являющихся инерциальными, их необходимо исправлять поправкой за поворот Земли за время
задаются в одной из общеземных систем (ПЗ-90, WGS-84), не являющихся инерциальными, их необходимо исправлять поправкой за поворот Земли за время ![]() :
:
![]() , (4.9)
, (4.9)
где w - угловая скорость вращения Земли.
Таким образом, в уравнении (4.7) содержится четыре неизвестных: три координаты станции XA, YA, ZA и поправка часов приемника dtA. Уравнение и может быть решено, если измерены псевдодальности до четырех или более спутников. При этом предполагается, что величина dtA в процессе измерений не изменяется.
Если известен вектор предварительного положения пункта  , то задача сводится к определению вектора поправок в координаты
, то задача сводится к определению вектора поправок в координаты  и сдвига шкал часов
и сдвига шкал часов ![]() . Обозначив
. Обозначив ![]() , получаем систему уравнений поправок в линейном виде:
, получаем систему уравнений поправок в линейном виде:
![]() . (4.10)
. (4.10)
Здесь через е обозначены направляющие косинусы топоцентрических направлений:
![]() . (4.11)
. (4.11)
Свободный член ![]() также вычисляется по предварительным координатам пункта и исправленным за вращение Земли координатам спутников:
также вычисляется по предварительным координатам пункта и исправленным за вращение Земли координатам спутников:
![]() , (4.12)
, (4.12)
![]() . (4.13)
. (4.13)
Если наблюдалось s спутников, то введя обозначения
 , (4.14)
, (4.14)
систему уравнений (4.10) можно записать в матричном виде:
![]() . (4.15)
. (4.15)
При s=4 вектор поправок в псевдодальности , а решение системы уравнений (4.15) производится по формуле:
![]() . (4.16)
. (4.16)
Тогда вектор координат пункта и сдвиг шкалы часов приемника определяются из выражений:
![]() . (4.17)
. (4.17)
Так реализуется режим трехмерных определений (3D) или навигационное решение. С точки зрения космической геодезии навигационное решение представляет собой реализацию навигационного варианта орбитального метода [33]. Часто его называют абсолютным методом. При ![]() достигается режим трехмерных переопределенных измерений (overdetermined 3D). Решение производится по методу наименьших квадратов под условием
достигается режим трехмерных переопределенных измерений (overdetermined 3D). Решение производится по методу наименьших квадратов под условием ![]() . Для этого составляется система нормальных уравнений:
. Для этого составляется система нормальных уравнений:
![]() , (4.18)
, (4.18)
откуда
![]() . (4.19)
. (4.19)
Решение системы (4.15) производится методом приближений, так как для линеаризации (4.8) необходимо иметь априорные координаты приемника. В их качестве обычно используют хранящиеся в памяти результаты последнего решения. В [68] сообщается, что при ошибке положения в 8000 км достаточно четырех итераций.
Для тех случаев, когда число спутников ![]() , используется дополнительная информация, например, предполагается измеренной высота приемника над эллипсоидом HA. В этом случае в уравнении (4.8) прямоугольные координаты необходимо заменить на геодезические. Тогда в уравнении (4.10) остаются три неизвестных: поправки в широту и долготу (плановые координаты) и сдвиг шкалы часов приемника. Можно также составить уравнение измерений для высоты:
, используется дополнительная информация, например, предполагается измеренной высота приемника над эллипсоидом HA. В этом случае в уравнении (4.8) прямоугольные координаты необходимо заменить на геодезические. Тогда в уравнении (4.10) остаются три неизвестных: поправки в широту и долготу (плановые координаты) и сдвиг шкалы часов приемника. Можно также составить уравнение измерений для высоты:
![]() (4.20)
(4.20)
Радиус эллипсоида R находится по геодезической широте приемника:
![]() , (4.21)
, (4.21)
где a и e – большая полуось и эксцентриситет общего земного эллипсоида.
Приведенное к линейному виду уравнение (4.20) решается совместно с тремя (возможно и большее число) уравнениями вида (4.10). Этот режим вводится во многие виды аппаратуры и применяется в тех случаях, когда недостаточно спутников для режимов 3D. Режим 2D предполагает известной геодезическую высоту полевого приемника, поэтому точность определения плановых координат в этом режиме дополнительно зависит от точности использованной высоты. Замена геодезической высоты нормальной высотой, взятой, к примеру, с карты будет приводить к дополнительным ошибкам. Режим применяется на водной поверхности или в равнинных местностях. Для реализации этого режима на самолетах некоторые приемники работают в комплекте с высотомерами.
4.3.2. Коэффициенты понижения точности DOP
Оценка точности результатов уравнивания обычно выполняется с помощью ковариационной матрицы K или корреляционной матрицы Q, которые связаны между собой через среднюю квадратическую ошибку единицы веса m соотношением:
![]() . (4.22)
. (4.22)
В ковариационной матрице диагональными элементами являются квадраты средних квадратических ошибок неизвестных ![]() , недиагональные элементы (ковариации) равны произведениям средних квадратических ошибок и коэффициентов корреляции r, характеризующих линейную зависимость между уравненными величинами. Ковариационная матрица для навигационного решения имеет вид:
, недиагональные элементы (ковариации) равны произведениям средних квадратических ошибок и коэффициентов корреляции r, характеризующих линейную зависимость между уравненными величинами. Ковариационная матрица для навигационного решения имеет вид:
 . (4.23)
. (4.23)
Корреляционная матрица имеет вид:
 . (4.24)
. (4.24)
где pi – веса уравненных величин.
В подавляющем большинстве случаев измерения псевдодальностей принимаются некоррелированными и равноточными, т. е. матрица весов измерений P определяется как
![]() , (4.25)
, (4.25)
где m0 – априорная средняя квадратическая ошибка единицы веса, а I – единичная матрица размера ![]() (s – число спутников). Поэтому корреляционная матрица вычисляется через коэффициенты матрицы уравнений поправок А:
(s – число спутников). Поэтому корреляционная матрица вычисляется через коэффициенты матрицы уравнений поправок А:
 . (4.26)
. (4.26)
Отсюда следует, что оценка точности неизвестных распадается на две части: определение средней квадратической ошибки единицы веса, которая зависит от точности измерения псевдодальностей, и нахождение обратной матрицы нормальных уравнений, которая зависит от взаимного расположения определяемого пункта и созвездия спутников, т. е. от геометрии засечки.
Средняя квадратическая ошибка единицы веса m может быть найдена по результатам уравнивания, если число спутников в созвездии больше, чем четыре:
![]() . (4.27)
. (4.27)
Априорная средняя квадратическая ошибка единицы веса m0 может быть оценена, исходя из анализа точности измерений псевдодальностей, типа аппаратуры, режима работы СРНС и. т.д. (см. табл. 4.3). Для оценки влияния геометрии расположения спутников на точность навигационного решения используются коэффициенты понижения точности DOP (Dilution of Precision – понижение точности). Коэффициенты DOP являются функциями диагональных элементов ковариационной матрицы уравненных параметров. В общем случае,
![]() , (4.28)
, (4.28)
где m – средняя квадратическая ошибка, например, для положения в плане или по высоте [91, 104].
Если вектор определяемых параметров X и матрица коэффициентов А задаются уравнениями (4.14), то оценка точности неизвестных выполняется в соответствии с известными формулами:
![]() , (4.29)
, (4.29)
полная ошибка положения пункта находится по формуле:
![]() . (4.30)
. (4.30)
а полная ошибка положения с учетом ошибок времени – по формуле:
![]() . (4.31)
. (4.31)
Обозначим:
![]() , (4.32)
, (4.32)
![]() , (4.33)
, (4.33)
![]() . (4.34)
. (4.34)
Более удобно оценивать точность в локальной геодезической координатной системе ENU, поскольку ошибка в координате N равна ошибке в широте, ошибка в координате E равна ошибке в долготе, и ошибка в U равна ошибке в геодезической высоте H. Корреляционную матрицу Q можно преобразовать в корреляционную матрицу этой координатной системы QENUt с использованием соотношения:
 , (4.35)
, (4.35)
в котором матрица R определяется формулой (1.65). Теперь, используя матрицу ![]() , можно сделать априорную оценку точности определения положения в плане и по высоте:
, можно сделать априорную оценку точности определения положения в плане и по высоте:
![]() , (4.36)
, (4.36)
![]() . (4.37)
. (4.37)
Коэффициенты DOP, называемые также геометрическими факторами, широко применяются для планирования сеансов наблюдений. Обычно используются следующие коэффициенты понижения точности:
- VDOP (Vertical DOP) характеризует понижение точности геодезической высоты,
- HDOP (Horizontal DOP)- понижение точности плановых координат,
- PDOP (Position DOP) – понижение точности положения,
- TDOP (Time DOP) – понижение точности времени,
- GDOP (Geometrical DOP)–понижение точности положения и времени из-за геометрии. GDOP является наиболее общей характеристикой, отражающей геометрию положения и оценку времени.
Чем больше используется спутников, тем лучше для точности. Однако геометрические факторы DOP могут также использоваться для нахождения четырех лучших спутников из группы, состоящей из более чем четырех спутников. Средняя величина HDOP и VDOP - около двух для лучшего возможного созвездия из 4-х спутников. DOP’ы можно легко вычислять на будущее, давая приближенное положение приемника и предсказанные эфемериды спутника. Также они часто используются для обнаружения временных слабых мест в геометрии для быстростатических и кинематических методов, а также для точной навигации [15, 58, 91, 93, 104].
При отсутствии режима зашумления SA достигается точность 10 м с вероятностью 95%. В таблице 4.2 приводятся сведения о точности измерений, доступной в условиях России. Из таблицы видно, что потенциальные возможности абсолютных определений по системе ГЛОНАСС выше, чем по GPS, во всяком случае, в условиях режима SA. На это указывали еще разработчики первого интегрированного приемника [81]. Таблица 4.1
Таблица 4.2. Средние квадратические ошибки (СКО) абсолютного метода определения координат кодовыми приемниками (PDOP » 4)
№№ п. п. | Навигац. Система | Вид сигнала | Время Измерений | Вид эфемерид | СКО положения в плане (м) |
1 | ГЛОНАСС | стандартный код | Неск. секунд | бортовые | 30 |
2 | ГЛОНАСС | точный код | - " - | - " - | 10-15 |
3 | GPS | C/A c режимом SA | - " - | - " - | 100 |
4 | GPS | C/A без режима SA | - " - | - " - | 10 |
5 | GPS | C/A c режимом SA | 8 часов | - " - | 16 |
4.3.3. Навигация со спутниковым приемником
В полевой работе геодезисту приходится постоянно контролировать свое положение, сверяясь с картой. Подобные задачи стоят при аэросъемке или при съемке шельфа, когда необходимо точно выйти на нужную точку. Часто геодезисту приходится отыскивать геодезические пункты, что особенно трудно при утрате знаков, их наружного оформления. В этих случаях навигационные приемники незаменимы.
В дальнейшем под навигацией будем понимать способ выбора пути для передвижения на земле, на море или в воздухе.
Главные навигационные функции приемника:
- определение текущих координат, скорости и курса (азимута вектора скорости);
- определение текущего времени, времени пребывания в пути и времени прибытия в пункт назначения;
- определение расстояния до заданного пункта и пеленга на него (азимута направления с текущей точки на пункт назначения);
- определение величины и направления бокового отклонения от линии маршрута или направления поворота в движении.
Существует СПА с графическим представлением навигационной ситуации, в том числе и с отображением ее на электронной карте. Возможна навигация по абсолютным и по дифференциальным определениям с коррекцией в реальном времени.
Для работы в режиме навигации необходимо иметь в библиотеке приемника хотя бы одну созданную путевую точку. Как правило, доступно несколько способов создания путевых точек:
- путем прямого ввода их координат и названий c клавиатуры приемника;
- переводом заранее подготовленных данных из компьютера;
- посредством записи измеренных координат в память приемника во время посещения ПТ;
- путем вычисления положения ПТ по расстоянию и азимуту или дирекционному углу от точки с известными координатами.
Для навигации по GPS-приемнику необходимо задать начальную "FROM" и конечную "TO" путевые точки (в приемнике могут быть и другие обозначения объектов навигации). В качестве начальной точки может выступать текущее положение приемника. На рис. 4.1 показаны навигационные параметры для динамического кода Land:
- скорость движения Vel (Velocity) (размерность - в соответствии с конфигурацией линейных величин и динамическим кодом),
- путевой угол или курс HDG (Heading), т. е. азимут вектора скорости,
- дальность RNG (Range) до точки "TO" или "FROM",
- пеленг BRG (Bearing) - азимут на точку "TO" или "FROM",
- боковое отклонение от кратчайшего маршрута XTE (Trace Error) и указание стороны, в которую удалился оператор: Left - влево, или Right – вправо.
 |
Рис. 4.4. Навигационные параметры
Угловые величины - курс и пеленг - вычисляются по дуге большого круга и отсчитываются от направления на север по часовой стрелке.
Для движения по кратчайшему пути оператор должен держать курс таким же, как пеленг, боковое отклонение свести до нуля, и двигаться до тех пор, пока дальность не уменьшится до нуля.
4.3.4. Определение координат пункта абсолютным методом
по фазовым измерениям
Фаза несущей ![]() равна разности между фазой
равна разности между фазой ![]() сигнала несущей, созданного в приемнике А в момент приема сигнала, и фазой
сигнала несущей, созданного в приемнике А в момент приема сигнала, и фазой ![]() сигнала несущей, созданного на i-ом спутнике в момент передачи сигнала. Когда сигнал спутника принимается, может измеряться только дробная часть фазы, т. е. целое число волн
сигнала несущей, созданного на i-ом спутнике в момент передачи сигнала. Когда сигнал спутника принимается, может измеряться только дробная часть фазы, т. е. целое число волн ![]() неизвестно. Вывод уравнения фазы аналогичен выводу уравнения псевдодальности за исключением указанной целой неоднозначности
неизвестно. Вывод уравнения фазы аналогичен выводу уравнения псевдодальности за исключением указанной целой неоднозначности ![]() и начальных фаз генераторов в приемнике
и начальных фаз генераторов в приемнике ![]() и на спутнике
и на спутнике ![]() . Фазу
. Фазу ![]() в циклах выражают в единицах расстояния умножением на длину волны l, т. е. вводится величина , для которой получено выражение в разделе 3:
в циклах выражают в единицах расстояния умножением на длину волны l, т. е. вводится величина , для которой получено выражение в разделе 3:
 (4.38)
(4.38)
Здесь di и dA - задержки в аппаратуре спутника и приемника для фазы, ![]() - влияние многопутности сигналов на фазу,
- влияние многопутности сигналов на фазу, ![]() - погрешность измерения фазы или шум измерений. Он имеет порядок 1 - 2 мм, то-есть значительно меньше шума псевдодальности
- погрешность измерения фазы или шум измерений. Он имеет порядок 1 - 2 мм, то-есть значительно меньше шума псевдодальности  .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
