


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
fL1 = f01 + K f1, fL2 = f02 + K f2
f1 = 0,5625 МГц, f02 =1246 МГц,
f01 =1602 МГц, f2 = 0,4375 МГц,
где номера K = от 1 до 24. К 1998 г., чтобы не мешать радиоастрономии, будут исключены номера K = от 16 до 20. Спутники в противоположных полушариях получат одинаковые номера. К 2005 г. сохранят только номера K с 1 по 12, а позже - с -7 по +4. На каждом спутнике все сигналы формируют от одного эталонного генератора основной частоты f0 = 5,11 МГц. Несущие частоты находятся в соотношении f L1/f L2 = 9/7. Длины волн 01=18,7 см, 02=24,1 см.
В ГЛОНАСС эфемериды содержат геоцентрические координаты спутника и другое, а альманах - литер К несущей частоты, время и долготу первого прохождения внутри суток восходящего узла, поправки к наклонению орбиты и периоду обращения, аргумент перигея и эксцентриситет орбиты, сдвиг шкалы времени и другое.
Таблица 6
Характеристики сигналов, передаваемых КА
Параметр | ГЛОНАСС | GPS |
Поляризация радиоволн | круговая | круговая |
Несущие частоты L1 | 1602,56–1615,5 Мгц | 1557,42 Мгц |
Несущие частоты L2 | 1246,44–1256,5 Мгц | 1227,6 Мгц |
Разделение сигналов | частотное | кодовое |
Объем потока сообщений | 7500 бит | 37500 бит |
Длит. передачи сообщения | 2,5 мин | 12,5 мин |
Скорость передачи данных | 50 зн/с | 50 зн/с |
Повторение меток времени | 2 с | 6 с |
Счет времени.
На спутниках эталонные генераторы высокостабильных колебаний одновременно
являются хранителями времени. На борту каждого КА сигналы формируются от четырех
цезиевых атомных стандартов с относительной нестабильностью частоты за сутки около 10-13. Передаваемые радиосигналы несут метки времени. По этим меткам на Земле при помощи станций службы времени производится сверка временных шкал с государственными эталонами. По ним же синхронизируют измерения и в аппаратуре пользователей.
3. ВИДЫ GPS-ИЗМЕРЕНИЙ
(3. РЕЖИМЫ РАБОТЫ GPS)
3.1. Измерения по кодам
Для определения координат GPS-приемников и поправок их часов измеряются расстояния до четырех и более НИСЗ. Аппаратура спутника i и приемника A образуют радиодальномер. Расстояния определяются беззапросным методом с использованием сигналов электромагнитных волн (ЭМВ) синхронизированных часами спутника и приемника [71]. Приемник принимает ЭМВ со спутника, сравнивает их с местными, выработанными сигналами в приемнике, и на момент времени t определяет время запаздывания t(t), затрачиваемое на путь от спутника до приемника. [71]
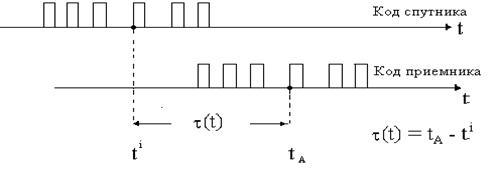
Время запаздывания t(t) определяется как разность показаний часов спутника ti и приемника tA в моменты генерации одного и того же сигнала:
t(t) = tA – t i. (3.1)
Расстояние между спутником и приемником вычисляется по формуле
![]() (t)= v × t(t), (3.2)
(t)= v × t(t), (3.2)
где v – скорость распространения волны в атмосфере.
Движение cпутника учитывается зависимостью измеряемых величин от времени t. Иногда для сокращения записи обозначение t опускается.
Измерения времени t выполняются кодовыми или фазовыми методами. Кодовые измерения выполняются c помощью C/А или Р - кода, а наиболее точные измерения выполняются фазовыми методами на несущих частотах f1 и f2. Основные характеристики кодов и сигналов GPS представлены в таблице 3.1.
Рассмотрим измерения по C/А - коду. Под кодами понимают последовательность сигналов по форме близких к прямоугольным. Отсутствие сигнала интерпретируют как нуль, а наличие как единицу (рис. 3.1). Сигнал с кодами, генерируемыми аппаратурой спутника, проходит измеряемое расстояние от спутника к приемнику. В GPS-приемнике генерируются точно такие же коды, синхронизированные кварцевым генератором часов приемника. Из данных таблицы следует, что один символ C/А – кода соответствует приблизительно 293 м, а весь код – 293 км. Другими словами, С/А код состоит из 1000 символов. Все расстояние более чем вкм от НИСЗ до GPS-приемника будет состоять из N отрезков по 293.26 км, m – отрезков по 293.26 м и доли D от 293.26 м.
Таблица 3.1
Характеристики сигналов GPS
Продолжительность и длина кода | Частота(МГц) | Период и длина волны символа кода | Разрешение (1% от длины волны) | |
C/А | 1мс 293.26 км | 1.023 | 1 мкс 293.26 м | 10 нс 3 м |
Р - код | 7 суток 18.1 ×1010 км | 10.23 | 0.1 мкс 29.33 м | 1нс 0.3 м |
f2 | 1227.6 | 24.4 см | 2.4 мм | |
f1 | 1575.42 | 19.05 см | 1.9 мм |
Величина N – целое число миллисекунд распространения сигнала от спутника до приемника, примерно равно 70-80 единицам. Зафиксировать величину N невозможно, и она определяет неоднозначность C/А - кодовых измерений. Ее надо находить другим способом, например, по расстоянию приближенно известному с точностью до 100 км. Для этого задают приближенные координаты приемника, положим, определенные по карте. Величины m и D измеряют, совмещая с принятым со спутника кодом сигнал, созданный в приемнике, путем последовательного сдвига до наступления корреляции.
Допустим, что на спутнике и в приемнике коды генерируют строго синхронно. Тогда приходящий в приемник сигнал спутника будет «запаздывать» пропорционально времени распространения τ по отношению к сигналу приемника, и при наложении коды не совпадут. Местный сигнал приемника последовательно «задерживают» на такое измеряемое время, чтобы принимаемый сигнал успел его «догнать», и они оба совпали.
Качество результата будет зависеть от точности интерполяции кода. Современные приборы позволяют фиксировать D с точностью 0.01 доли периода и даже точнее. В линейной мере это составляет для С/A-кода около 3 м. Поэтому, если бы не было других источников ошибок, то дальности можно было бы измерять с погрешностью от нескольких метров и точнее. Точный Р - код обладает более высокими возможностями. В GPS длительность символа Р-кода соответствует расстоянию 30 м. Точность измерений будет в 10 раз выше чем для стандартного С/А - кода. Длительность Р-кода семь суток, что многократно больше времени пробега радиоволной пути от спутника до GPS-приемника. Время на дистанции спутник-приемник оценивается величиной около
0.07 с.
 |
Рис.3.1. Временная диаграмма С/А и Р – кода.
Количество символов в Р-коде около 6×1012. C точностью порядка 0.3 м дальность определима однозначно. Тем не менее, и в данном случае желательно знать приближенное значение координат наземной станции. Дело в том, что не известно не только время запаздывания кода, но и для полного последовательного перебора дубликата Р-кодовых сигналов приемника до момента совпадения их фазы с фазой принимаемых сигналов потребовалось бы очень большое время поиска. Приемник способен “просмотреть” за 1 с до 1000 символов. Когда координаты станции совсем не известны их принимают равными нулю. В этом случае приемник располагают как бы в центре масс Земли. Дальность от спутника до центра Земли всегда больше, чем до ее поверхности, наибольшая погрешность в приближенном расстоянии будет равна радиусу Земли 6371 км. Легко подсчитать, что время поиска не превысит четырех минут. Поэтому современные GPS - приемники находят местоположение и без предварительного указания текущего времени и приближенных координат станции. В действительности нет идеальных синхронных колебаний на спутнике и в приемнике. Если приемник генерирует код с задержкой в один символ, это уже ведет к искажению длин, в зависимости от типа кода, от 30 до 300 м. В результате получают не дальности, а псевдодальности (псевдорасстояния или квазидальности). Одной из причин этого является нестабильность кварцевого генератора приемника, оцениваемая относительной величиной
 |
ухода частоты порядка 10-10.
Рис. 3.2. Измерение времени запаздывания идеальных кодовых
сигналов в приемнике
Атомные стандарты частоты (АСЧ), используемые в GPS-спутниках, являются сложными и дорогостоящими системами, имеющими большую массу и габариты. По этой причине в GPS-приемниках используются не АСЧ, а кварцевые генераторы (КГ), имеющие низкую стоимость и малую массу. КГ имеют относительную частоту на четыре порядка хуже, чем стабильность АСЧ. Однако их использование все же позволяет решать поставленную задачу.
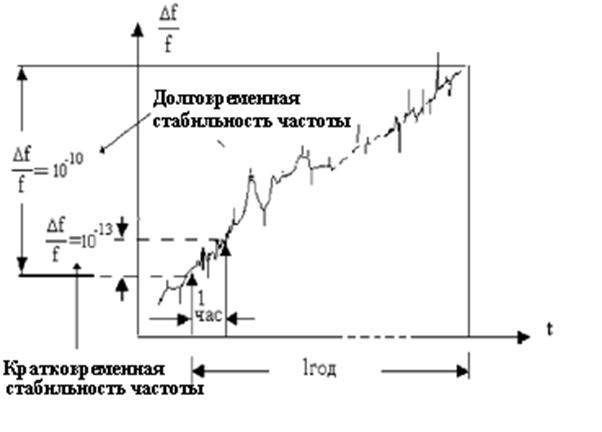
В кварцевом генераторе частота колебаний определяется собственной частотой пьезоэлектрической пластинки кварца, а это макросистема подверженная влиянию температуры, давления, влажности и других факторов. В то время как на спутниках установлены атомные стандарты частоты с относительной погрешностью до 10-13. В атомном стандарте частоты процессы происходят на “квантовом уровне”, а молекула микросистемы не подвержена воздействию перечисленных выше факторов. Указанная нестабильность частот относится к долговременной с периодом до года. Кратковременная нестабильность кварцевого генератора в пределах часа составляет около 10-13. Поэтому за время измерений GPS-приемником в пределах нескольких десятков минут кратковременную нестабильность часов приемника и долговременную стабильность часов спутника можно считать одинаковыми. Однако часы приемника будут отличаться от часов спутника на систематическую величину, называемую поправкой часов приемника и обусловленную несинхронной работой часов спутника и приемника.
 |
Вследствие нестабильности частот генераторов спутника и приемника их часы будут иметь соответствующие уходы, выражаемые поправками часов для приемника dtA и для спутника dt i. Тогда номинальное GPS-время приемника и спутника по отношению к истинному времени спутника t ir и приемник trA будет иметь следующий вид:
Рис.3.3. График нестабильности частоты кварцевого генератора приемника.
t ir = t i + dt i;
tr, A = tA + dtA ,
где t i и tA – номинальное время часов спутника i и приемника А. Индекс r относится к истинному времени. Псевдорасстояние ![]() , измеренное между спутником i в момент выхода сигнала и приемником А в момент прихода сигнала по шкале номинального времени, можно определить по формуле
, измеренное между спутником i в момент выхода сигнала и приемником А в момент прихода сигнала по шкале номинального времени, можно определить по формуле
![]() , (3.3)
, (3.3)
где с – скорость света в вакууме.
Топоцентрическое расстояние  является геометрическим расстоянием, которое сигнал проходит от момента его излучения спутником i до момента приема – в приемнике А. Поскольку расстояние между спутником и приемником точно не известно, то получаемый приемником сигнал от спутника и генерируемый в приемнике сигнал излучается в различные моменты времени. Так как мы не знаем истинного времени tr,A, то топоцентрическое расстояние линеаризуется около известного номинального времени
является геометрическим расстоянием, которое сигнал проходит от момента его излучения спутником i до момента приема – в приемнике А. Поскольку расстояние между спутником и приемником точно не известно, то получаемый приемником сигнал от спутника и генерируемый в приемнике сигнал излучается в различные моменты времени. Так как мы не знаем истинного времени tr,A, то топоцентрическое расстояние линеаризуется около известного номинального времени
![]() (3.4)
(3.4)
В этой формуле не учтены члены более высокого порядка малости.
Поскольку результаты измерений обрабатываются в единой системе GPS-времени t, то результаты измерений с момента времени tA приемника пересчитываются на время t. C учетом известных атмосферных искажений и ошибок, сопутствующих определению псевдодальности, уравнение для несущей частоте f1 (учитывается индексом 1) представим как
(t ) =r iA( t ) – c dtA +с dti - IiA,1( t) + TiA( t) + d A,1( tА ) +
![]() + diA,1( tA) + eρ , (3.5)
+ diA,1( tA) + eρ , (3.5)
где r iA( t) - псевдорасстояние между спутником и приемником, T iA( t) и I iA,1( t) - поправки за влияние тропосферы и ионосферы, d A,1( tA ) и ![]() – аппаратурные задержки в приемнике и спутнике, diA,1( tA) - искажения, вызванные многопутностью сигналов, eρ - случайные погрешности.
– аппаратурные задержки в приемнике и спутнике, diA,1( tA) - искажения, вызванные многопутностью сигналов, eρ - случайные погрешности.
Таким образом, относительно кодовых измерений можно сделать следующие выводы:
- для С/А –кодовых измерений неоднозначность разрешается заданием грубых координат приемника с точностью до 100 км.
3.2. Стандартный режим работы GPS (абсолютный)
В режиме использованы квазидальномерные измерения. Их применение возможно,
если синхронизированы временные шкалы часов всех спутников системы, а часы наблюдателя имеют достаточную стабильность за время измерений. В этом случае многоканальный приемник фиксирует интервалы времени прихода сигналов от нескольких спутников относительно местной временной шкалы. Эти интервалы определяют соответствующие псевдодальности, отличающиеся от истинных дальностей на величину, обусловленную сдвигом временной шкалы потребителя относительно временной шкалы часов спутника.
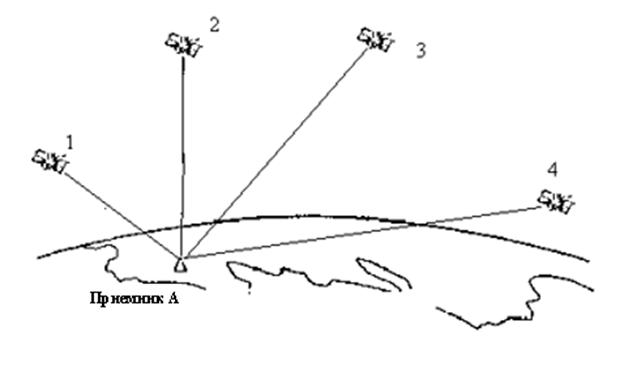 |
Четыре одновременно измеренные псевдодальности, а также принятые в навигационном сообщении данные об эфемеридах и временных параметрах часов спутников позволяют вычислить три координаты наблюдателя и поправку к временной шкале приемника относительно шкалы космического аппарата*.
Рис.3.4.
![]() Уравнение псевдодальности
Уравнение псевдодальности ![]() между i-ым спутником и пунктом А наблюдателя записывается упрощенным выражением [34]
между i-ым спутником и пунктом А наблюдателя записывается упрощенным выражением [34]
 , (3.6)
, (3.6)

где ![]() - действительное расстояние между точкой наблюдения А с координатами XA, YA, ZA и i-м спутником с известными координатами
- действительное расстояние между точкой наблюдения А с координатами XA, YA, ZA и i-м спутником с известными координатами ![]() (i=1, ...,4);
(i=1, ...,4);
TA - полная временная задержка, обусловленная влиянием земной атмосферы с учетом ионосферной ТИ и тропосферной TТ задержек: TA = ТИ +ТТ;
dtA, dti - отклонение эталонов (шкал) времени приемника наблюдателя и космического аппарата соответственно от единого системного времени GPS NAVSTAR;
с - скорость электромагнитных волн.
Из (3.1) следует, что XA,YA, ZA , и d tA – неизвестные, определяемые из системы уравнений, составленной для четырех псевдодальностей.
3.2.1. Погрешности абсолютного режима
Точность измерений стандартного режима зависит от ряда источников погрешностей. К таким источникам относятся:
а) неточности прогноза эфемерид и ухода шкал времени созвездия спутников, образующиеся при расчетах и закладке с контрольных станций управления на спутники;
б) возмущения орбит и уходы шкалы времени, вызванные гравитационными и другими эффектами;
в) задержки сигнала в ионосфере, вызванные наличием неоднородной плотности ионизации в вертикальном распределение;
г) задержки сигнала в тропосфере, вызванные изменениями температуры, давления и влажности в приземном слое атмосферы;
д) шумы приемника GPS, вызванные электромагнитными помехами, поступающими на вход приемника;
е) многолучевость (многопутность) распространения сигнала, вызванная приемом сигнала от отражающих поверхностей.
Значения погрешностей зависит также от типа кода (Р или С/А), т. е. того кода, с помощью которого определяется псевдодальность. Составляющие погрешностей местоопределений приведены в табл. 3.1.
Таблица 3.1
Источники и виды погрешностей | При использовании Р-кода, м | При использовании С/А-кода, м |
Неточность прогноза эфемерид и ухода ШВ Возмущения орбиты и немодулируемые уходы ШВ Задержка сигнала в ионосфере Задержка сигнала в тропосфере Шумы приемника Многолучевость распространения Ограничения, вводимые мерами избирательного доступа для гражданских потребителей (избирательной доступности)* Прочие источники Эквивалентные СКП измерения дальности | 3.5 2.7 2.3 2.0 1.5 1.2 - - 1.0 5.8 | 3.9 2.7 9.0 2.0 5.0 1.2 30.0 1.0 32.2 |
Погрешности местоопределений зависят не только от ошибок определения навигационного параметра, но и от расположения спутников и потребителей в пространстве. Для учета влияния этого фактора на определение координат потребителя и временной поправки введены соответствующие разновидности DOP фактора (Dilution of Precision –снижения точности). Для интегральной оценки выбора того или иного созвездия космических аппаратов (спутников) используется геометрический фактор GDOP (Geometric Dilution Of Precision – геометрическое снижение точности) [6].
 (3.8)
(3.8)
где sr - среднеквадратическое отклонение дальности;
sx, sy, sz - среднеквадратические ошибки составляющих координат местоположения;
с - скорость распространения радиоволн;
sDtu - среднеквадратическая ошибка шкалы времени потребителя.
Анализ GDOP показывает, что этот коэффициент принимает наименьшее значение при оптимальном выборе созвездия навигационных спутников. Такому алгоритму выбора для получения максимальной точности определения координат удовлетворяет расположение, при котором один из спутников находится в зените, а три других располагаются как можно ближе к горизонту, образуя равносторонний треугольник.
В практических навигационных измерениях максимально допустимым геометрическим фактором является значение менее семи (GDOP < 7), оптимальное значение GDOP »3.
Кроме GDOP фактора в качестве критериев снижения точности могут применяться:
а) PDOP – Position Dulition of Precision – снижение точности местоположения, определяемый как:
 , (3.9)
, (3.9)
б) TDOP – Time Dulition of Precision – снижение точности за уход времени, определяется выражением:
 , (3.10)
, (3.10)
где ![]() - среднеквадратическое отклонение шкалы времени спутника;
- среднеквадратическое отклонение шкалы времени спутника;
в) HDOP – Horisonal Dulition of Precision – снижение точности в горизонтальной плоскости, определяется как:
 , (3.11)
, (3.11)
где ![]() - среднеквадратическое отклонение дальности в горизонтальной проекции;
- среднеквадратическое отклонение дальности в горизонтальной проекции;
г) VDOP – Vertical Dulition of Precision – снижение точности в вертика*льной плоскости, определяется соотношением:
 , (3.12)
, (3.12)
где ![]() - среднеквадратическое отклонение дальности в вертикальной плоскости.
- среднеквадратическое отклонение дальности в вертикальной плоскости.
3.3. Дифференциальный режим работы GPS
 |
Режим основан на точном измерении относительных положений двух приемников, отслеживающих одни и те же сигналы GPS поэтому он назван дифференциальным. Структурная схема реализации дифференциального режима работы GPS приведена на рис. 3.5.
Рис. 3.5. Структура дифференциальной подсистемы:
НИСЗ - навигационный искусственный спутник Земли; БС - базовая станция;
ПВО - передатчик; КИ - корректирующая информация;
АП - аппаратура потребителя.
Сигналы от спутников (НИСЗ1 - НИСЗ4) поступают на объект потребителя например самолет и на базовую станцию (БС). На базовой станции в точной АП результаты измерений накапливаются, в них отфильтровываются случайные погрешности. Эти данные поступают на формирователь корректирующей информации (КИ). Для коррекции информация сравнивается с точными данными базовой станции, полученными путем геодезической привязки. Сформированные корректирующие поправки через передатчик (Прд) направляются на объект потребителя.
Этим режимом работы GPS выявляются систематические составляющие погрешностей эфемерид, ухода шкалы времени, влияния ионосферы и тропосферы. Эффект от использования режима DGPS зависит от степени пространственной и временной корреляций базовой станции и объекта потребителя. При сильной корреляции систематическая часть погрешностей практически полностью исключается.
При дифференциальном режиме GPS применяют следующие варианты ввода корректирующих поправок:
- коррекция координат;
- коррекция навигационных поправок;
- разностная коррекция навигационного параметра.
3.3.1. Коррекция координат
Метод предполагает, что корректирующая информация формируется на базовой станции (БС) путем сопоставления эталонных координат (координаты антенны определены из геодезических данных) с координатами, вычисленными в результате навигационного сеанса, проведенного аппаратурой потребителя (АП) наивысшего класса точности. Полученные дифференциальные поправки передаются объекту потребителя, который уточняет по ним свои координаты. Алгоритм этого метода может быть представлен как [13]
![]() (3.13)
(3.13)
где ![]() ,
, ![]() , - векторы оценок координат БС и потребителя по сигналам спутников;
, - векторы оценок координат БС и потребителя по сигналам спутников;
ХКСЭ - вектор эталонных координат КС;
DХ - вектор поправок;
ХП - вектор уточненных координат потребителя.
На рис. 3.6 представлена структурная схема реализации метода коррекции координат.
 |
Недостаток метода - ограничение дальности действия. Потребитель работает по наивыгоднейшей форме созвездия спутников (фактор GDOP); по этому же созвездию должна работать и базовая станция (БС). Это возможно при небольших удалениях от БС (сотни км). Перенос же поправок, найденных по одному созвездию, на результаты определений по другому созвездию, ухудшает точность измерений.
Рис. 3.6. Иллюстрация метода коррекции координат: АП - аппаратура потребителя; М - модулятор; ДМ - демодулятор; КК - корректор координат; КИ - корректирующая информация; Прм - приемник; Прд - передатчик
3.3.2. Коррекция навигационных параметров
Суть метода состоит в том, что на БС вычисляются поправки ко всем навигационным искусственным спутникам Земли (НИСЗ), находящимся над радиогоризонтом. Для этого измеряют псевдодальности до всех НИСЗ и по эталонным координатам БС и НИСЗ находят расчетные псевдодальности, которые принимаются за истинные. Разности измеренных и расчетных значений передаются потребителям. Каждый потребитель выбирают оптимально созвездие и измеренные псевдодальности корректирует полученными с БС поправками. Алгоритм метода следующий [13]:
![]() ; (3.14)
; (3.14)
 ;
;
 .
.
где![]()
![]() - псевдодальности, измеренные на БС потребителем;
- псевдодальности, измеренные на БС потребителем;
![]() - эталонные псевдодальности для БС;
- эталонные псевдодальности для БС;
![]() - поправки к псевдодальностям;
- поправки к псевдодальностям;
 |
Рис. 3.7. Иллюстрация метода коррекции навигационного параметра.
КП - корректор параметра.
В рассмотренных методах ведется точный расчет координат спутников, что усложняет математическое обеспечение аппаратуры потребителя и способствует ее удорожанию.
3.3.3. Разностная коррекция навигационных параметров
Данный метод применяется в малой зоне, вблизи базовой станции (БС). При близком расположении пунктов потребителя и базовой станции фронты электромагнитных волн, приходящих от спутников к пунктам, являются фактически плоскими, а тогда линии "спутник - потребитель" и "спутник - БС" будут задаваться одинаковыми направляющими косинусами. Тогда разности дальностей от спутника до базовой станции и от базовой станции до потребителя (П) могут быть связаны с разностью координат базовой станции и потребителя через соответствующие направляющие косинусы. Для реализации метода на базовой станции в определенные моменты измеряют псевдодальности, вычисляют направляющие косинусы и передают эту информацию потребителю. Потребитель проводит также измерения по спутникам, образующим оптимальное созвездие в эти же моменты. Образуя относящиеся к данным спутникам разности  , потребитель вычисляет приращение своих координат относительно координат БС, т. е. находит свое относительное местоположение. Если потребитель получает от БС ее координаты в определенной системе отсчета, то его координаты могут быть также приведены к этой системе. Способ применим в зоне км) вблизи базовой станции.
, потребитель вычисляет приращение своих координат относительно координат БС, т. е. находит свое относительное местоположение. Если потребитель получает от БС ее координаты в определенной системе отсчета, то его координаты могут быть также приведены к этой системе. Способ применим в зоне км) вблизи базовой станции.
3.3.4. Погрешности дифференциального режима
Применение дифференциального режима GPS позволяет в значительной мере уменьшить влияние некоторых источников погрешностей. Фактически систематические составляющие погрешностей (за неточность прогноза эфемерид и ухода шкалы времени, задержки сигнала в ионосфере, ограничения избирательного доступа) исключаются, а случайные составляющие погрешностей снижаются по сравнению со стандартным режимом.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
