


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (3.42)
(3.42)
где 
 ;
;
 .
.
Таким образом, постановка задачи сводится к следующему положению для определения точных приращений координат Dx, Dy и Dz требуется определить целые числа фазовых циклов двойных разностей фаз и поправки в координаты ![]() пункта В. С этой целью воспользуемся уравнением вторых разностей фаз, представленных в следующем виде
пункта В. С этой целью воспользуемся уравнением вторых разностей фаз, представленных в следующем виде
![]() (3.43)
(3.43)
где К – номер эпохи;
![]() - вторые разности показаний счетчиков фазометров;
- вторые разности показаний счетчиков фазометров;
 - значения вторых разности фаз вычисленные по измеренным сдвигам фаз в приемниках А и В на спутников i и j.
- значения вторых разности фаз вычисленные по измеренным сдвигам фаз в приемниках А и В на спутников i и j.
Пусть в измерениях участвуют R приемников, которые принимают сигналы от S спутников в течении q эпох. Тогда для двух приемников R=2, наблюдаемых сигналов от четырех спутников S=4 одной эпохи q=1, можно составить S-1=3 двойных разностей. Одному из спутников присваивается номер 1, а двойные разности фаз для спутников с индексами i и j применяются в следующих комбинациях: ![]() ;
; ![]() ;
; ![]() . Таким образом в рассматриваемом случае количество неизвестных будет определяться тремя значениями поправок
. Таким образом в рассматриваемом случае количество неизвестных будет определяться тремя значениями поправок ![]() в координаты пункта В и тремя значениями целых чисел
в координаты пункта В и тремя значениями целых чисел  , относящихся только к первой эпохе наблюдений. Трех уравнений недостаточно для определения шести неизвестных поэтому используются несколько эпох q>2, что позволяет находить искомые величины по способу наименьших квадратов.
, относящихся только к первой эпохе наблюдений. Трех уравнений недостаточно для определения шести неизвестных поэтому используются несколько эпох q>2, что позволяет находить искомые величины по способу наименьших квадратов.
Выбор именно таких комбинаций номеров спутников i j объясняется тем, что остальные комбинации являются линейно-зависимыми от этих функций. Например:
![]() ,
,
![]() . (3.44)
. (3.44)
Двойные разности фаз являются результатом обработки первичной (входной) измерительной информации, поступающей в приемники, а приращения координат являются выходной информацией, получаемой из совместной обработки наблюдений от S спутников. Следовательно, двойные разности фаз и приращения координат функционально связаны между собой. Для получения алгоритмов, необходимых для решения поставленной выше задачи выполним разложение двойных разностей в ряд Тейлора по приращениям координат и неизвестным числам фазовых циклов. В краткой записи ряд Тейлора, ограниченный первыми членами разложения, с учетом уравнения (3.43) будет иметь следующий вид
 ;
;
или
 (3.45)
(3.45)
где  ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
В матричном виде для трех уравнений вторых разностей фаз, имеющих индексы 12, 13 и 14, с шестью неизвестными из наблюдений четырех спутников уравнение (3.45) примет вид
 (3.46)
(3.46)
где  .
.
В краткой матричной форме это уравнение запишем в виде
 (3.47)
(3.47)
где А (k) – матрица частных производных размерностью (S-1) ´ (S+2);
Х =  – вектор неизвестных;
– вектор неизвестных;
![]() - вектор столбец измеренных и рассчитанных значений вторых разностей фаз.
- вектор столбец измеренных и рассчитанных значений вторых разностей фаз.
Для перехода от применения одной эпохи к нескольким эпохам воспользуемся записью уравнения (3.46) в виде

где А– матрица частных производных размерностью Т´[(S-1) ´ (S+2)], состоящая из подматриц вида А(k):
 ,
,
L – вектор размерностью Т´(S-1), cостоящий из уравнений типа L(k): ![]() .
.
Вычисление неизвестных по способу наименьших квадратов осуществляется методом итераций. Для вычисления начальных значений целых чисел фазовых циклов ![]() в параметрах L(K) используется формула
в параметрах L(K) используется формула
, (3.48)
где
![]() - вторые разности топоцентрических расстояний, определенные по Р-кодовым измерениям;
- вторые разности топоцентрических расстояний, определенные по Р-кодовым измерениям;
![]() - первое приближение для
- первое приближение для ![]() округленное до ближайшего целого числа в
округленное до ближайшего целого числа в  .
.
Модуль разности радиусов-векторов приемника и спутника представляет собой истинную или геометрическую дальность :
![]() . (3.49)
. (3.49)
Точности Р (или С/A)-кодовых измерений наряду с погрешностями эфемерид спутников недостаточно для безошибочного разрешения неоднозначности. Определенное значение  округляется до ближайшего целого числа, а решение базирующееся на способе наименьших квадратов повторяется только уже не с Р-кодовыми расстояниями в системе уравнений (3.32), а с длинами, найденными из сис-
округляется до ближайшего целого числа, а решение базирующееся на способе наименьших квадратов повторяется только уже не с Р-кодовыми расстояниями в системе уравнений (3.32), а с длинами, найденными из сис-
темы уравнений (3.40) после подстановки в них предвычисленного значения ![]() . Таким образом получается следующее значение
. Таким образом получается следующее значение![]() . После предварительного нахождения целых чисел, которые лежат в доверительных пределах применяются статистические испытания для решения вопроса о том, какое из целых чисел является “наилучшим”. Подбор чисел
. После предварительного нахождения целых чисел, которые лежат в доверительных пределах применяются статистические испытания для решения вопроса о том, какое из целых чисел является “наилучшим”. Подбор чисел ![]() осуществляется по вершинам куба неоднозначностей рис. 3.14.
осуществляется по вершинам куба неоднозначностей рис. 3.14.
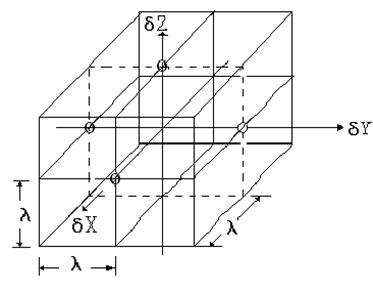 |
Рис.3.14. Трехмерный куб искажений неоднозначности
.
Длина базиса ![]() , определяемая по приращениям координат приемников. функционально зависит от разности расстояний до соответствующих спутников. При определении разности расстояний исключаются систематические погрешности в базисных линиях длиной менее, чем 20-30км точность вычислений приращений координат обычно является достаточно высокой для оценки целых величин, которые должны быть найдены. При неопределенности в целых числах более чем один цикл, должны быть использованы субоптимальные схемы оценок за счет использования целых чисел, минимизированных с помощью взвешенной суммы квадратированных остатков [ ] в формуле для определения базисного расстояния
, определяемая по приращениям координат приемников. функционально зависит от разности расстояний до соответствующих спутников. При определении разности расстояний исключаются систематические погрешности в базисных линиях длиной менее, чем 20-30км точность вычислений приращений координат обычно является достаточно высокой для оценки целых величин, которые должны быть найдены. При неопределенности в целых числах более чем один цикл, должны быть использованы субоптимальные схемы оценок за счет использования целых чисел, минимизированных с помощью взвешенной суммы квадратированных остатков [ ] в формуле для определения базисного расстояния

Если разрешение неоднозначности не удается выполнить в результате постобработки базисной линии с требуемым критерием точности, то выдается соответствующая оценка, указывающая на отсутствие гарантий в достижении требуемой точности.
3.7.3. Редактирование с целью исключения пропуска циклов
Пропуски циклов наблюдаются под влиянием таких причин, как препятствия на линии визирования, прекращения отслеживания спутников в определенные моменты времени с последующим возобновлением такого слежения. Прерванные фазовые измерения после восстановления являются такими же, как если бы поддерживалось слежение. Однако целое число циклов при этом отличается. При измерении на двух частотах пропуски циклов могут случаться на одной из двух частот, что в последующем осложняет рассматриваемую проблему. Обычно при фазовых измерениях соответствующих однопутному прохождению сигнала, доминируют ошибки генератора приемника, для которых характерным является тот факт, что обнаружены, могут быть только очевидные пропуски циклов. С другой стороны двойные разности не зависят от ошибок генераторов. Поэтому последние являются более подходящими для обнаружения пропуска отдельных циклов. В третьих, при возможном перерыве в приеме сигнала спутника. Подобные потери циклов создаются при затенении пути радиолуча между спутником и приемником строениями, рельефом местности, растениями и т. п. Возникает задача по восстановлению прерванных циклов.
Рис.3.15. Изменение фазы: 1 – соответствующее изменению дальности до спутника,
2 – измеренное значение фазы в GPS-приемнике. Потеря сигнала на интервале ![]() .
.
Поясним это с помощью рис. 3.15, на котором изображена временная диаграмма изменения фазы, вызванная изменением расстояния до спутника, при наличии перерыва в приеме информации от спутника на интервале между эпохами t1 и t2. На этом рисунке моменты времени, в которые происходит изменение целого числа периодов, обозначены вертикальным штрихом. Методов, имеющих отношение к этой проблеме, достаточно много. Принципы некоторые из них описаны ниже.
Один из ранних подходов состоял в том, чтобы вычислить остатки, поддерживающие постоянным наилучшее местоположение тех станций, с помощью которых производятся наблюдения. Соответствующие местоположения станций получаются в результате первой обработки разности фаз между эпохами, которая в наибольшей степени свободна от влияния потерь циклов. Затем потери циклов визуально идентифицируют как разрывы на остатках двойных разностей. Моменты времени, для которых отмечаются потери циклов, регистрируются, а результаты наблюдений корректируются и перевычисляются. Однако этот метод требует очень много времени.
Автоматизированная процедура редактирования при потере циклов предложена в работе [ ]. Предварительные местоположения станций хорошо определяются из двойных разностей фаз, которые также различаются между эпохами (тройные разности). Разрывы в сдвоенных разностях фаз затем изолируются посредством тщательного исследования разности остатков между эпохами в местах соответствующих уклонениям. После этого предполагается, что эти места представляют собой потерю циклов. И в них производится округление до ближайшей целой величины. Канал приемника, в котором наблюдается потеря циклов, идентифицируется, а потеря циклов устраняется из всех последующих наблюдений в этом канале. Если используется идея о базовой станции и базовом спутнике, предложенная Goad (1985), то потеря циклов, имеющих отношение к базовой станции или к базовому спутнику, переносятся на последующие данные, имеющие отношения координат всем другим местоположениям станций и другим спутникам.
3.7.4. Разрешение неоднозначностидля двухчастотных измерений
Значительные возможности в задаче разрешения неоднозначности создаются за счет использования разности фаз сигнала GPS одновременно на двух несущих частотах, предусмотренных в передатчике спутника. Решения с использованием несущих фазовых измерений требует использования приближенных начальных координат приемника. Для этих целей удобно использовать приближенные координаты из кодовых измерений, обеспечивающих достаточную точность для относительных измерений на коротких дистанциях.
Только измерения фазы несущей может обеспечить миллиметровую точность, фаза кода одна может дать только метровый уровень точности. Наблюдение на двух частотах наиболее полно ослабляет влияние ионосферы. На коротких базовых линиях, где влияние ионосферы незначительное, каждый сигнал f1+f2 эквивалентен 1.5 одночастотного сигнала и обеспечивает более быстрые и надежные результаты. Поэтому самые точные результаты можно получить только с двухчастотным приемником.
Псевдорасстояния  , измеряемые с помощью P-кодов и измерения
, измеряемые с помощью P-кодов и измерения ![]() на несущих частотах f1 и f2 , составляют основу для решения проблемы неоднозначностей. Временные зависимости псевдорасстояний для станции с приемником в точке А и спутника i на момент времени t можно записать в следующей форме
на несущих частотах f1 и f2 , составляют основу для решения проблемы неоднозначностей. Временные зависимости псевдорасстояний для станции с приемником в точке А и спутника i на момент времени t можно записать в следующей форме
 (3.50)
(3.50)
где ![]() - поправки часов приемника и тропосферные задержки. В дальнейшем для обозначения стандартных преобразований с использованием частот f1 и f2 будем пользоваться индексами 1 и 2. Неизвестными являются топоцентрическое расстояние
- поправки часов приемника и тропосферные задержки. В дальнейшем для обозначения стандартных преобразований с использованием частот f1 и f2 будем пользоваться индексами 1 и 2. Неизвестными являются топоцентрическое расстояние ![]() , ионосферные задержки
, ионосферные задержки ![]() для P-кода и целые числа фазовых неоднозначностей
для P-кода и целые числа фазовых неоднозначностей ![]() и
и ![]() . Таким образом, по результатам совместных фазовых и Р-кодовых измерений на двух несущих частотах имеем четыре уравнения четырьмя неизвестными. Из решения уравнения можно найти искомые величины
. Таким образом, по результатам совместных фазовых и Р-кодовых измерений на двух несущих частотах имеем четыре уравнения четырьмя неизвестными. Из решения уравнения можно найти искомые величины ![]() ,
, ,
, ![]() ,
, , но поскольку точности Р-кодовых измерений недостаточно для уверенного определения неизвестных параметров измерения производятся на G эпох с последующим решением по способу наименьших квадратов. Поправка
, но поскольку точности Р-кодовых измерений недостаточно для уверенного определения неизвестных параметров измерения производятся на G эпох с последующим решением по способу наименьших квадратов. Поправка ![]() одинакова для всех четырех уравнений и определяется из навигационного решения и по метеоданным для учета влияния тропосферы. Уравнение (10.1) дает возможность описывать работу GPS-приемника, учитывая топоцентрические расстояния и ионосферные изменения во времени. В этом уравнении не рассматриваются поправки, которые исключаются обработкой результатов в дифференциальном режиме.
одинакова для всех четырех уравнений и определяется из навигационного решения и по метеоданным для учета влияния тропосферы. Уравнение (10.1) дает возможность описывать работу GPS-приемника, учитывая топоцентрические расстояния и ионосферные изменения во времени. В этом уравнении не рассматриваются поправки, которые исключаются обработкой результатов в дифференциальном режиме.
Итак, выполняя на различные эпохи достаточное количество измерений необходимое для определения неизвестных параметров по методу наименьших квадратов с требуемой точностью, уравнения (10.1) дают возможность определять одновременно целое число фазовых циклов на частотах f1 и f2 и поправки за влияние ионосферы.
Наличие измерений разностей фаз на двух частотах позволяет использовать широкополосные (wide-line) и узкополосные значения (narrow-line) неоднозначности в качестве дополнительной информации, позволяющей ускорить и повысить точность процесса разрешения неоднозначности. Сущность этих методов заключается в следующем, если имеются измерения разности фаз ![]() на несущих частотах f1 и f2, то вычислив их разность значений
на несущих частотах f1 и f2, то вычислив их разность значений ![]() получим результат, соответствующий измерениям на разностной частоте
получим результат, соответствующий измерениям на разностной частоте ![]() с длиной волны lw, определяемой по формуле
с длиной волны lw, определяемой по формуле
![]() (3.51)
(3.51)
где с - скорость света в вакууме.
Индекс w означает широкополосность. Расстояние соответствующее одной длине волны называют полосой. Изменению фазы ![]() на один цикл, что эквивалентно на единицу неоднозначности, соответствует изменению длины трассы на одну дину волны
на один цикл, что эквивалентно на единицу неоднозначности, соответствует изменению длины трассы на одну дину волны ![]() . Измерениям с большей длиной волны будет соответствовать значение целого числа фазовых циклов
. Измерениям с большей длиной волны будет соответствовать значение целого числа фазовых циклов  и определятся оно будет более надежно и с меньшим количеством наблюдений, а следовательно и за более короткое время.
и определятся оно будет более надежно и с меньшим количеством наблюдений, а следовательно и за более короткое время.
Узкополосные измерения с индексом n (narrow-line) получают как сумму разностей фаз ![]() , измеренных на частотах f1 и f2, которые будут соответствовать измерениям с частотой fn=f1+f2=2803.02 МГц и иметь длину волны ln, которая вычисляется по формуле
, измеренных на частотах f1 и f2, которые будут соответствовать измерениям с частотой fn=f1+f2=2803.02 МГц и иметь длину волны ln, которая вычисляется по формуле
![]()
а соответствующее значение целого числа фазовых циклов определяется уравнением
 . (3.52)
. (3.52)
Узкополосные измерения являются более точными и используются для сглаживания результатов измерений, что особенно важно в режиме “кинематика”, а также получения более быстрых и надежных решений в процессе разрешения неоднозначности.
Описанные выше методы широкополосных и узкополосных измерений подвергают дополнительным линейным преобразованиям путем введения комбинаций целых чисел m и n для ослабления или исключения нежелательных воздействий таких как ионосферные задержки и ошибки часов. В этом случае частота представляется в виде обобщенных функций
![]() (3.53)
(3.53)
где m и n –целые чисела. Длина волны комбинационных колебаний определяется по формуле
 (3.54)
(3.54)
Целые числа фазовых циклов, соотвествующих комбинационным частотам f m, n имеют вид
 . (3.55)
. (3.55)
Индексы m и n в принципе могут быть положительными или отрицательными числами Комбинации для которых m и n имеют различные знаки называют широкополосными наблюдениями. Если m и n имеют одинаковые знаки, то говорят об узкоплосных наблюдениях.
Результатами всех линейных комбинаций являются эквивалентные в статистическом смысле преобразования наблюдений, применяемые для перераспределения случайных ошибок в вариационно-ковариационных преобразованиях с целью получения более достоверных искомых значений целых чисел фазовых циклов.
3.8 Влияние атмосферы на результаты GPS - измерений
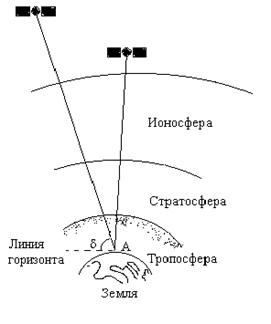 Атмосфера это газовая оболочка, вращающаяся вместе с Землей, как единое целое. Вследствие неоднородности нагрева земной поверхности солнечной радиацией атмосфера представляет собой, движущуюся неоднородную в пространстве и времени среду. С точки зрения распространения радиоволн, излучаемых GPS – спутниками, атмосферу представляют в виде трех слоев: тропосферу, простирающуюся от поверхности Земли до высоты 10км, стратосферу, расположенную в интервале высот от 10 до 80км, и ионосферу, охватывающую высоты от 80 до 800км.
Атмосфера это газовая оболочка, вращающаяся вместе с Землей, как единое целое. Вследствие неоднородности нагрева земной поверхности солнечной радиацией атмосфера представляет собой, движущуюся неоднородную в пространстве и времени среду. С точки зрения распространения радиоволн, излучаемых GPS – спутниками, атмосферу представляют в виде трех слоев: тропосферу, простирающуюся от поверхности Земли до высоты 10км, стратосферу, расположенную в интервале высот от 10 до 80км, и ионосферу, охватывающую высоты от 80 до 800км.
Атмосфера оказывает воздействия на результаты GPS-измерений, которые мож Рис.3.16. Строение атмосферы. но свести к трем основным факторам:
- рассеиванию и поглощению радиоволн;
- искажению скорости распространения радиоволн;
- случайным искажениям параметров сигналов, приводящих к дополнительным погрешностям результатов измерений. В процессе распространения радиоволн в атмосфере возникают дополнительные потери, которые yменьшают дальность действия систем по сравнению с дальностью действия в свободном пространстве. Для измерений расстояний до спутников требуется чтобы в приемник поступало определенное количество энергии радиоволн. Энергия полезного сигнала, принятого приемником от спутника с высоты более 20200км составляет ничтожную долю энергии, излученной антенной спутника, которая рассеивается в пространстве, поглощается в атмосфере, теряется в приемном тракте приемника. Земная атмосфера обладает частотно-избирательными свойствами, пропуская почти без потерь одни волны и задерживая другие. Во всем диапазоне ЭМВ существуют участки “окна прозрачности” в пределах которых колебания проникают через толщу атмосферы. Длины волн несущих колебаний GPS-сигналов с l»0.2 м попадают в окна прозрачности атмосферы которое лежит в пределах 10мм < l < 30м.
Постоянство скорости и прямолинейность распространения ЭМВ в атмосфере, лежащие в основе радиотехнических методов измерений расстояний, нарушаются из-за неоднородности атмосферы. Различают неоднородность атмосферы регулярную и случайную, характеризующуюся лишь статистическими параметрами. Регулярная неоднородность приводит к систематическим погрешностям, возникающим вследствие постепенного изменения показателя преломления атмосферы по высоте, которая может быть существенно уменьшена введением соответствующих поправок. Под поправкой за распространение ЭМВ в атмосфере будем понимать разность расстояний, вызванных отличием соответствующих значений показателей преломлений для реальной атмосферы (n ¹ 1) и свободного пространства (n = 1).
3.8.1 Влияние тропосферы
Самый нижний слой атмосферы тропосфера содержит до 80% массы и практически всю влагу. Состояние тропосферы определяется тремя основными параметрами: температурой, давлением и влажностью. Скорость распространения радиоволн в тропосфере связана со скоростью распространения ЭМВ в вакууме и показателем преломления соотношением v = c / n. Для радиоволн, используемых в GPS, тропосфера является недиспергирующей средой поскольку показатель преломления тропосферы n не зависит от длины волны (частоты).
Показатель преломления тропосферы n зависит от температуры, давления, влажности и может быть рассчитан по формуле Фрума и Эссена (1951)
 , (3.56 )
, (3.56 )
где P – атмосферное давление в миллибарах (мб)*);
T - температура по шкале Кельвина (![]() );
);
e - давление водяного пара, влажность в мб.
Компонента сухого воздуха [первая составляющая в формуле (3.56), не зависящая от влажности е] на 90 % определяет значение показателя преломления. Эта составляющая может быть смоделирована с точностью 2 ¸5 % аппроксимирующей функцией зависящей от давления и температуры сухого воздуха. Различие моделей сухой тропосферы основывается на законах идеальных газов, образующих сферические слои, с толщиной до 40 км.
Влияние влажной компоненты [с множителем е в формуле (3.56)] вносит вклад до 10 % тропосферной рефракции. Слой влажной тропосферы составляет около 12 км. Влажная составляющая создает задержку 5-30 см, но может быть смоделирована с точностью 2 ¸5 см. Многие модели тропосферных поправок разработаны для вычисления зенитной задержки по непосредственным метеорологическим измерениям, сделанным на поверхности Земли во время наблюдений GPS. Однако все они страдают из-за того,
что поверхностные метеоданные в общем случае являются слабым индикатором распределения влажности над приемником. Получается, что сбор метеоданных, являющийся сам по себе сложной задачей, зачастую дает совершенно ошибочные данные. Близость к земной поверхности и локальные аномалии в погодных условиях затрудняют сбор объективной информации. Динамические процессы в атмосфере сглаживают эти эффекты, начиная с высот около 100 м над поверхностью. В качестве выхода из такого положения применяют метеорологические данные стандартной атмосферы. Обычно такая стандартная атмосфера создается заданием давления, температуры и влажности для уровня моря, а метеоданные для пунктов наблюдений вычисляются по их высотам. Примером приведения данных к заданной высоте станции h может служить следующая модель:
![]() ,
,
![]() , (3.57)
, (3.57)

где ![]() - опорная высота модели,
- опорная высота модели, ![]() - температура (сухая) на высоте
- температура (сухая) на высоте ![]() в
в ![]() , e - влажность на высоте
, e - влажность на высоте ![]() ,
, ![]() -давление на высоте
-давление на высоте ![]() ,
, ![]() - сухая температура на высоте
- сухая температура на высоте![]() ,
, ![]() - влажность на высоте
- влажность на высоте![]() ,
, ![]() - давление на высоте
- давление на высоте ![]() .
.
Параметры ![]() ,
, ![]() ,
,![]() берутся для некоторой стандартной атмосферы или строится локальная стандартная модель. В последнем случае используются метеоданные одной станции (опорной), а для других станций генерируются искусственные метеоданные с высотными градиентами для T, P и e из стандартных атмосферных моделей. Для разности высот меньше, чем 100 м, ошибки, введенные неверными градиентами, обычно намного меньше, чем ошибки, веденные калибровкой инструментов или поверхностными эффектами.
берутся для некоторой стандартной атмосферы или строится локальная стандартная модель. В последнем случае используются метеоданные одной станции (опорной), а для других станций генерируются искусственные метеоданные с высотными градиентами для T, P и e из стандартных атмосферных моделей. Для разности высот меньше, чем 100 м, ошибки, введенные неверными градиентами, обычно намного меньше, чем ошибки, веденные калибровкой инструментов или поверхностными эффектами.
Для описания изменений показателя преломления с высотой часто пользуются
экспоненциальной моделью:
(n-1) = (![]() -1) exp(-H/
-1) exp(-H/![]() ),
),
где ![]() - приземное значение показателя преломления,
- приземное значение показателя преломления, ![]() - так называемый масштаб высоты. По земному шару приземные значения (
- так называемый масштаб высоты. По земному шару приземные значения (![]() -1)
-1)![]() порядка , а приведенные на уровень моря - порядка единиц [71]. Масштаб высоты
порядка , а приведенные на уровень моря - порядка единиц [71]. Масштаб высоты
![]() = 6 - 8 км. На высоте H = 50 км величины (n-1)
= 6 - 8 км. На высоте H = 50 км величины (n-1) ![]()
![]() 0.
0.
Международным консультативным комитетом по радиочастотам (МККР) для модели международной стандартной атмосферы приняты значения (![]() -1)
-1) ![]() = 289 и
= 289 и ![]() = 7,35 км. Они соответствуют большому массиву метеоизмерений, выполненных в разных районах земного шара в разные сезоны и времена года [71]. При этих параметрах имеем данные представленные в таблице 3.3.
= 7,35 км. Они соответствуют большому массиву метеоизмерений, выполненных в разных районах земного шара в разные сезоны и времена года [71]. При этих параметрах имеем данные представленные в таблице 3.3.
Таблица 3.3
H, км | 0 | 1 | 3 | 10 | 20 | 50 |
| 289 | 252 | 192 | 74 | 19 | 0.3 |
Если метеоусловия очень специфичны, или существует большой перепад высот, то применяется локальная модель атмосферы, создаваемая по измеренным метеопараметрам. В этой методике метеоданные измеряют на земле, по крайней мере, на двух точках с достаточно быстрой последовательностью (10-30 мин между измерениями) и одновременно для каждой бригады. Все полученные данные приводят к одной опорной высоте, из которых затем вычисляют средние, чтобы получить параметры местной модели. Когда выбрана эта методика, нужно перед началом миссии, и регулярно во время нее, эталонировать барометры, термометры и психрометры, и использовать отчеты об эталонных измерениях.
Наименьшая временная задержка наблюдается в направлениях зенита (вблизи b=90°). Наиболее высокоточные измерения тропосферных задержек достигаются, если используются инструментальные способы. Применение радиометров на частотах 31 ГГц и 22 ГГц для измерения влажной составляющей позволяет измерить величину задержки с точностью 1-2 см.
Тропосферная задержка удлиняет геометрическую дистанцию и для средних метеоусловий может определяться временным параметром
 , (3.58)
, (3.58)
где ![]() – параметр, характеризующий состояние тропосферы;
– параметр, характеризующий состояние тропосферы;
d - угол места;
n - –показатель преломления радиоволн;
R – длина тропосферного участка радиотрассы.
Тропосферная задержка может составить 2¸2.5 м в зенитном направлении и 20¸28 м при угле места 5°.
Разработан ряд формул для поправок за атмосферу. В качестве исходных данных
используют метеорологические параметры пункта наблюдений. Одну из них предложил Saastamoinen [71]; ее даем в преобразованном виде:

Приняв давление Р=1013 мб, температуру Т=288°К или 15°С, влажность е=10 мб, получим следующие ![]() в зависимости от зенитных расстояний Z представленные в таблице 3.4.
в зависимости от зенитных расстояний Z представленные в таблице 3.4.
Таблица 3.4
| 0 | 20 | 40 | 60 | 70 | 80 | 90 |
| 2.41 | 2.56 | 3.14 | 4.80 | 7.0 | 13.4 | 24.2 |
При высотах КА над горизонтом менее 10° (Z > 80°) атмосферные задержки сигналов превышают 10 м. Поэтому. когда высоты КА <10°, а иногда <15-20°, наблюдений не производят. Формулы поправок за влияние атмосферы дают представление о величинах искажений дальности. На деле применение измеренных на станции метеоданных, за исключением измерений в горах, не дает преимуществ перед использованием моделей стандартной атмосферы. Наоборот - многие исследователи отмечают, что они иногда даже ухудшают результаты; особенно снижается точность определения высот.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
