


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1 Введение. Спутниковые методы в геодезии.
При внедрении спутниковых технологий в топографо-геодезическое производство резко изменились не только организационные и технические принципы проведения полевых и камеральных работ, но и многие другие основополагающие принципы, что дает основание говорить о революционных преобразованиях в геодезии, связанных со спутниковыми методами геодезических измерений на земной поверхности. Использование традиционных геодезических методов триангуляции или полигонометрии для передачи координат с высокой точностью на значительные расстояния невозможно из-за кривизны земной поверхности и неизбежных погрешностей измерений, вызванных влиянием приземного слоя атмосферы. Чтобы обеспечить прямую видимость между пунктами, необходимо было выбирать местоположение пунктов на командных высотах и строить знаки. При этом взаимное положение смежных пунктов удаленных друг от друга на 20-25 км определялось с погрешность порядка 5-10 см. Попытки решения данной проблемы путем использования синхронных наблюдений с удаленных пунктов звезд или естественного спутника Земли-Луны не обеспечивало требуемую точность. И только с запуском первых искусственных спутников Земли (ИСЗ) Современная спутниковая технология открыла возможность проведения высокоточных геодезических измерений при отсутствии прямой видимости между пунктами, в результате чего отпала необходимость постройки наружных сигналов и выбора пунктов на различного рода возвышениях. При этом длина измеряемых базисных линий столь жестко не лимитируется и может достигать тысячи и более километров. Геодезические измерения, базирующиеся на традиционных методах, приходится производить в высоко динамичных неустойчивых приземных слоях атмосферы. В результате этого внешние условия оказываются, во многих случаях, основным источником ошибок, ограничивающим предельную точность геодезических измерений, сокращая тем самым круг задач, решаемых геодезическими методами. Подавляющее большинство традиционных геодезических методов приспособлено для выполнения измерений в статике, т. е. между неподвижными пунктами, что негативно сказывается на развитии динамических методов, ориентированных на выполнении геодезических измерений в движении (морская геодезия, аэрофотосъемка и др.). Развиваемые в течение многих лет геодезические методы были ориентированы на раздельное создание плановых и высотных сетей, что обусловлено недостаточной универсальностью традиционных методов, не позволяющих одновременно и с необходимой точностью определять все три координаты определяемых пунктов. Альтернативный подход к выполнению геодезических измерений на принципиальной основе состоит в использовании пространственных методов измерений с применением в качестве опорных точек мгновенных положений искусственных спутников Земли. Базирующиеся на таких принципах измерительные комплексы получили название глобальных систем позиционирования, первоначальное назначение которых состояло в решении навигационных задач.
Спутниковые технологии появились в России в начале 1990-х годов, почти на 10 лет позднее, чем в США. Их преимущество перед обычными методами геодезии были настолько впечатляющим, что, несмотря на высокую стоимость оборудования, они быстро стали находить в топографо-геодезическом производстве России все более широкое применение. Однако отсутствие опыта выполнения работ и знаний по новым технологиям не позволяло их эффективно использовать. Для картографии и геоинформатики особенно важной является их интеграция с геоинформационными системами (ГИС). Основным достоинством спутниковых систем позиционирования является их глобальность, оперативность, всепогодность, оптимальная точность и эффективность. Для измерений не нужна видимость между определяемыми пунктами.
Вот некоторые области, где спутниковые системы позиционирования уже нашли применение:
- Развитие опорных геодезических сетей. Распространение единой высокоточной шкалы времени. Исследования сейсмической активности и вулканизма, движений полюсов, земной поверхности и ледников, геоморфологические, биогеографические, океанологические и метеорологические исследования, мониторинг ионосферы и др. Кадастровые работы. Обеспечение работ по землеустройству. Сельскохозяйственное применение - определение координат сельхозтехники с целью внесения удобрений по заранее заготовленным картам, привязка в ходе уборки объемов урожая к конкретным местам поля, выявление, местоопределение и картографирование скоплений сорняков и др. Экологические исследования: применение координатной привязки разливов нефти вследствие аварий, оценки площадей нефтяных пятен и определения направлений их движений. Съемка и картографирование всех видов - топографическая, специальная, тематическая. Сбор материала для ГИС - перспективное самостоятельное направление. Рядом фирм выпускаются приемники, специально ориентированные на сбор данных для ГИС.
Наблюдатель, перемещаясь по местности с таким приемником, автоматически фиксирует координаты объектов и дополнительно вводит в накопители информацию об их свойствах. Данные накапливаются в цифровом виде в соответствующих форматах и могут быть выведены на экран в целях визуализации и контроля. Появились комплексированные системы. На подвижных платформах кроме приемников спутниковых систем устанавливают инерциальные системы и цифровые видеокамеры. Инерциальные системы сохраняют привязку непрерывной даже в случаях, когда приемники теряют сигналы спутников. Видеокамеры позволяют получать стереоизображения, которые в последствии обрабатывают стерео-фотограмметрическими способами.
- Создание устройств, используемых в качестве поводырей слепых.
Обеспечение инженерно-прикладных работ - мостостроение, прокладка путепроводов, ЛЭП, привязка и вынос в натуру объектов и др.
Спасательно-предупредительные работы - геодезическое обеспечение при бедствиях и
катастрофах.
Диспетчерские службы - обеспечение работы пожарных, милиции, скорой помощи,
автомобильного и железнодорожного транспорта, где благодаря оптимальному выбору
маршрутов и постоянному контролю за движением предвидится значительная экономия
денежных средств и времени. Индивидуальное применение в быту. Установка соответствующей аппаратуры на личном автотранспорте. Автомобили экипируют электронными картами, по которым видно, где находится и куда движется автомашина. Навигация всех видов - воздушная, морская, сухопутная. Военные и разведывательные сферы.
Историческая справка.
Уже существует несколько поколений спутниковых систем позиционирования.
К первому поколению можно отнести системы, разрабатывавшиеся до 70-х годов и использовавшиеся более двух десятилетий. Это системы NNSS - США, ЦИКАДА - СССР и другие (Глумов, 1983; Медведев, Баранов, 1992).
NNSS (Navy Navigation Satellite System) - первоначально предназначалась для ВМФ США. Позже система получила название TRANSIT. В эксплуатации с 1964 г., в 1967 г. открыта для гражданского коммерческого использования. В 70-х годах появились сравнительно малогабаритные приемники GEOCEIVER, позволившие определять координаты с дециметровой точностью. К 1980г. многие тысячи потребителей разных государств мира пользовались услугами этой системы. С ее помощью в 1гг. в России создана доплеровская геодезическая сеть - ДГС.
ЦИКАДА - разработки начаты в 1967г., введена в эксплуатацию в 1979 г.
К первому поколению принадлежит также международная система обнаружения терпящих бедствие COSPAS-SARSAT.
Ко второму поколению относятся две системы GPS - США и ГЛОНАСС - РФ.
GPS - Global Positioning System. Параллельное название NAVSTAR - Navigation Satellite Timing and Ranging. Запуск спутников первого блока начат в 1978 г. Эксплутационная готовность объявлена в начале 1995 г.
ГЛОНАСС - Глобальная Навигационная Спутниковая Система. Разработки начаты в середине 70-х годов. В 1982 г. выведены первые ее спутники серии КОСМОС. В сентябре 1993 г. официально принята в эксплуатацию. В марте 1995 г. Правительство РФ специальным постановлением за № 000 открыла систему для гражданского применения. В январе 1996 г. ГЛОНАСС развернута полностью. Уже работают приемные устройства, одновременно использующие и GPS и ГЛОНАСС.
Геометрическая сущность местоопределения.
В системах спутникового позиционирования КА выполняют роль геодезических опорных пунктов. На каждый момент измерений их координаты должны быть известны. Координаты объекта находят способом засечек по измерениям при помощи аппаратуры на спутниках и на земле. Измеренные параметры определяют поверхности положения, в точке пересечения которых лежит искомый объект. В системе первого поколения TRANSIT на основе эффекта Доплера измеряли разности расстояний от приемника до двух поло-жений спутника на орбите. Поверхностями положений являлись гиперболоиды вращения. В современных системах измеряют дальности до КА и скорости изменений дальностей вследствие перемещений ИСЗ относительно пользователя. Измеренным скоростям соответствуют конические поверхности положения (конусы), а измеренным дальностям - сферические (сферы). В геодезических целях преимущественно пользуются дальностями, по которым реализуют пространственные линейные засечки.
Если с определяемого пункта M измерить расстояния R1, R2, R3 до трех пунктов 1, 2, 3, провести из них как из центров радиусами R1, R2, R3 сферы, то эти сферы пересекутся в точке M и определят ее положение. В этом заключается геометрическая сущность задачи. Когда известны координаты спутников, задачу легко решить аналитически и вычислить координаты пункта M. На деле измеряют искаженные расстояния. Их называют псевдодальностями. Чтобы правильно вычислить координаты пункта по псевдодальностям, надо их измерять не до двух или трех, а, как увидим позже, до большего числа спутников с известными координатами. Кроме того, как это принято в геодезии, всегда должны быть избыточно измеренные величины. Избыточные результаты повышают качество определений, ибо обеспечивают контроль и позволяют выполнять обработку по методу наименьших квадратов (МНК).
2 Спутниковые навигационные системы ГЛОНАСС и NAVSTAR (GPS)
В настоящее время мы являемся свидетелями интенсивного развития и изменения заложенных ранее систем GPS и ГЛОНАСС, появления таких новых систем, как Галилео, широкозонных дополнений WAAS, EGNOS и MSAS, а также региональных и локальных дифференциальных подсистем.
Летные испытания высокоорбитальной отечественной навигационной системы, получившей название ГЛОНАСС, были начаты в октябре 1982 года запуском спутника "Космос-1413"..."
В 1995 году было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 КА). Современное состояние системы характеризуется материалами раздела 2.8.
Разработаны самолетная аппаратура А-744, СНС-85, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП), "Бриз" (КБ "Навис"), самолетная аппаратура А-737, "Интер" (МКБ "Компас") и др. [6, 7].
Основным заказчиком и ответственным за испытания и управление системой являются Военно-космические силы (ВКС) РФ (сейчас Ракетные войска стратегического назначения, РВСН).
Основными направлениями дальнейших работ по системе определены [8]:
• модернизация СРНС ГЛОНАСС на основе модернизированного спутника ГЛОНАСС-М с повышенным гарантийным сроком службы (пять и более лет вместо трех в настоящее время) и более совершенными техническими характеристиками, что позволило бы повысить надежность и точность системы в целом;
• работы по внедрению технологии спутниковой навигации в отечественную экономику, науку и технику, а также создание нового поколения навигационной аппаратуры потребителей, станций дифференциальных поправок и контроля целостности;
• разработка и реализация концепции Российской широкозонной дифференциальной подсистемы на базе инфраструктуры ВКС и ее взаимодействия с ведомственными региональными и локальными дифференциальными подсистемами, находящимися как на территории России, так и за рубежом;
• развитие сотрудничества с различными международными и зарубежными организациями и фирмами в области расширения использования возможностей навигационной системы ГЛОНАСС для широкого круга потребителей;
• решение вопросов, связанных с использованием совместных навигационных полей систем ГЛОНАСС и GPS в интересах широкого круга потребителей мирового сообщества. Среди последних вопросов:
• поиск единых подходов к вопросу предоставления услуг мировому сообществу со стороны космических навигационных систем;
• согласование опорных систем координат и системных шкал времени;
• выработка мер по недопущению использования возможностей космических навигационных систем в интересах террористических режимов и группировок. Работа в указанных направлениях ведется в соответствии с требованиями, выдвигаемыми различными потребителями (воздушными, морскими и речными судами, наземными и космическими средствами, топогеодезическими, землеустроительными и другими службами). Ряд подробностей по истории создания системы приведен в [9-11].
2.2. Назначение, общая характеристика и состав системы
Основное назначение СНРС второго поколения ГЛОНАСС — глобальная оперативная навигация приземных подвижных объектов: наземных (сухопутных, морских, воздушных) и низкоорбитальных космических. Термин "глобальная оперативная навигация" означает, что подвижной объект, оснащенный навигационной аппаратурой потребителей (НАП), может в любом месте приземного пространства в любой момент времени определить (уточнить) параметры своего движения - три координаты и три составляющие вектора скорости [12].
Система разработана по заказу и находится под управлением Министерства Обороны РФ (РВСН). Распоряжением Президента РФ №38-рп от 18.2.99 г. ГЛОНАСС придан статус системы двойного (военного и гражданского) назначения [13]. Определено также, что федеральными органами исполнительной власти, ответственными за ее использование, поддержание и развитие, являются Министерство Обороны и Российское космическое агентство (сейчас Российское авиационно-космическое агентство). Координация вопросов развития и использования системы осуществляется Межведомственной комиссией "Интернавигация" и образованной в соответствии с Постановлением Правительства Российской Федерации № 000 от 29.3.1999 г. межведомственной оперативной группой.
В интересах мирового сообщества ГЛОНАСС используется в соответствии с Постановлениями Правительства Российской Федерации № 000 от 7.3.1995 г. и № 000 от 29.3.1999 г. Россия предоставляет систему в стандартном режиме для гражданского, коммерческого и научного использования без взимания за это специальной платы.
Основным разработчиком и создателем по системе в целом и по космическому сегменту являются НПО прикладной механики (г. Красноярск), а по НКА - ПО "Полет" (г. Омск).
Головным разработчиком радиотехнических комплексов (подсистем) является РНИИ КП; ответственным за создание временного комплекса, системы синхронизации и навигационной аппаратуры потребителей определен Российский институт радионавигации и времени. К созданию НАП в последующем были подключены и самостоятельно подключились также другие организации (глава 9).
Документом, устанавливающим взаимоотношения потребителей с системой, является Интерфейсный контрольный документ ГЛОНАСС [14]. Информирование потребителей о состоянии системы осуществляется через Координационный научно-информационный центр Министерства Обороны Российской Федерации (КНИЦ МО РФ), а также через Информационно-аналитический центр (ИАЦ) Координатно-Временного Обеспечения (КВО) Центра управления полетами (ЦУП) Российского авиационно-космического агентства.
В ГЛОНАСС применяются навигационные космические аппараты (НКА) на круговых геоцентрических орбитах с высотой -20000 км над поверхностью Земли. Благодаря использованию в бортовых эталонах времени и частоты (БЭВЧ) НКА атомных стандартов частоты (АСЧ) в системе обеспечивается взаимная синхронизация навигационных радиосигналов, излучаемых орбитальной группировкой НКА. В НАП на подвижном объекте в сеансе навигации принимаются радиосигналы не менее чем от четырех радиовидимых НКА и используются для измерения не менее, чем четырех соответствующих псевдодальностей (ПД) и радиальных псевдоскоростей (ПС). Результаты измерений и эфемеридная информация (ЭИ), принятая от каждого НКА, позволяют определить (уточнить) три координаты и три составляющие вектора скорости подвижного объекта и определить смещение шкалы времени (ШВ) объекта относительно ШВ системы. В СРНС число потребителей не ограничивается, поскольку НАП не передает радиосигналы на НКА, а только принимает их от НКА (пассивная навигация).
Радионавигационное поле СРНС ГЛОНАСС наряду с основной функцией (глобальная оперативная навигация приземных подвижных объектов) позволяет проводить [12]:
• локальную высокоточную навигацию наземных подвижных объектов (сухопутных, морских, воздушных) на основе дифференциальных методов навигации с применением стационарных наземных корректирующих станций и НКА;
• высокоточную взаимную геодезическую "привязку" удаленных наземных объектов;
• взаимную синхронизацию стандартов частоты и времени на удаленных наземных объектах;
• неоперативную автономную навигацию низко - и среднеорбитальных космических объектов;
• определение ориентации объекта на основе радиоинтерферометрических измерений
на объекте с помощью навигационных радиосигналов, принимаемых разнесенными
антеннами.
СРНС ГЛОНАСС включает в себя три сегмента: космический сегмент с орбитальной группировкой (ОГ) НКА; сегмент управления - наземный комплекс управления (НКУ) орбитальной группировкой НКА; сегмент НАП - аппаратуры пользователей (рис. 2.1).
2.3.1. Орбитальная группировка
Полная орбитальная группировка (ОГ) в ГЛОНАСС [12] содержит 24 штатных НКА на круговых орбитах с наклонением i=64,8° в трех орбитальных плоскостях по восемь НКА в каждой. Долготы восходящих узлов трех орбитальных плоскостей различаются номинально на 120°. Номинальный период обращения НКА равен Т=11 ч 15 мин 44 с, и, соответственно, номинальная высота круговой орбиты составляет 19100 км над поверхностью Земли. В каждой орбитальной плоскости восемь НКА разнесены по аргументу широты номинально через 45°, и аргументы широты восьми НКА в трех орбитальных плоскостях сдвинуты на ± 15°. За время эксплуатации НКА на орбите (до пяти лет) реальные положения НКА в ОГ могут отличаться от номинальных не более чем на ± 5°.
Для сравнения здесь отметим, что полная ОГ в системе GPS содержит 24 штатных НКА на круговых синхронных орбитах с периодом обращения Т=12 ч 00 мин (высота орбиты составляет около 20000 км над поверхностью Земли) в шести орбитальных плоскостях (по четыре НКА в каждой) с наклонением i=55°, а долготы восходящих узлов которых смещены с интервалом номинально 60°.
Орбитальная группировка НКА с несинхронными круговыми орбитами (Т=11 ч 16 мин) в системе ГЛОНАСС более стабильна по сравнению с ОГ НКА с синхронными круговыми орбитами (Т=12 ч 00 мин) в системе GPS. Данное обстоятельство можно объяснить следующим образом. Синхронная орбита НКА имеет двухвитковый след на поверхности Земли, и возмущения орбит отдельных НКА, обусловленные нецентральностью поля тяготения Земли, будут заметно отличаться. Несинхронная круговая орбита имеет многовитковый след на поверхности Земли, и возмущения орбит для всех НКА в ОГ будут практически одинаковы [12]. Орбитальное построение ГЛОНАСС может быть схематично проиллюстрировано рис. 2.2, на которой выделены орбитальные плоскости и точки "размещения" НКА.
2.3.2. Навигационный космический аппарат
Общий вид НКА представлен на рис. 2.3. Основу НКА составляет цилиндрический гермоконтейнер диаметром 1,350 м, в котором размещаются служебные системы и специальная аппаратура. С выдвинутой (раскрытой) штангой магнитометра его длина составляет 7,840 м. На "нижнем" (в положении штатной ориентации) днище НКА смонтирована платформа с антенно-фидерными устройствами и панелью уголковых отражателей; на "верхнем" - топливные баки и штанга магнитометра. На боковой поверхности гермоконтейнера закреплены два привода системы одноосной ориентации солнечных батарей, два раскрывающихся на орбите радиатора системы терморегулирования, два блока двигателей и датчики ориентации [9]. Питание всех подсистем производится от солнечных батарей, ширина которых в раскрытом виде составляет 7,230 м. Общая масса составляет 1кг [15]. При этом масса конструкции равна всего 237 кг [9].
В число систем НКА входят [9]: бортовые навигационный передатчик (БНП), хронизатор (БХ) ("часы"), управляющий комплекс (БУК), средства заправки и обеспечения параметров среды в гермоконтейнере; системы ориентации и стабилизации (СО), коррекции, электропитания (СЭП), терморегулирования (СТР); элементы конструкции и кабельная сеть.
2.4. Наземный комплекс управления
Наземный комплекс управления (НКУ) (рис.2.5) орбитальной группировкой НКА выполняет четыре группы задач:
1. эфемеридное и частотно-временное обеспечение НКА;
2. мониторинг радионавигационного поля;
3. радиотелеметрический мониторинг НКА;
4. командное и программное радиоуправление функционированием НКА.
После 2000 г. при восполнении ОГ будут применяться НКА второй модификации (ГЛОНАСС-М), которые по сравнению с НКА первой модификации обладают следующими основными преимуществами [12]:
• более стабильный бортовой АСЧ, имеющий среднеквадратическое относительное отклонение среднесуточных значений частоты не хуже 1*10-13; погрешности (СКО) БИС и ЗИС также будут снижены до уровня 0,7 м и соответственно погрешность (СКО) ЧВП составит 5 нс при прогнозе на 12 ч и 7 нс при прогнозе на 24 ч;
• меньше уровень немодулированных возмущений орбиты НКА, что позволит повысить точность определения и прогноза ЭИ;
• двухкомпонентный навигационный радиосигнал (узкополосный и широкополосный) в обоих диапазонах частот 1600 МГц и 1250 МГц.
В связи с передачей дальномерного кода в диапазоне L2 в навигационном сообщении будет передаваться дополнительный параметр, характеризующий разницу аппаратных задержек дальномерных кодов в диапазонах L1 и L2. Кроме того, будет введен признак модификации НКА, а также признак ожидаемой секундной коррекции шкалы времени UTC (SU) [16].
Идеи использования космических аппаратов для навигации подвижных объектов в США, как свидетельствует профессор Стэнфордского университета Б. Паркинсон, в прошлом руководитель программы "Навстар-GPS" от ВВС, начали развиваться после запуска в СССР в 1957 году первого искусственного спутника Земли. В это время Лаборатории прикладной физики Университета Джона Гопкинса (ЛПФ) была поставлена задача слежения за советским ИСЗ посредством приема его сигнала на наземном пункте с известными координатами, выделения доплеровского сдвига несущей частоты передатчика ИСЗ и дальнейшего расчета параметров движения спутника. Обратная задача расчета координат приемника на основе обработки принятого сигнала и координат ИСЗ представлялась очевидной и естественной.
В 1973 году программы ВВС и ВМС США были объединены в общую Навигационную технологическую программу, позднее превратившуюся в программу "Навстар-GPS"; спутник TIMATION-III был переоборудован в общий космический аппарат NTS-1, запущенный 14 июля 1974 г. с кварцевым и рубидиевым стандартами частоты; за ним последовало создание КА NTS-2 и NTS-3 соответственно с цезиевым и водородным стандартами. В течение этого периода времени точность синхронизации возросла с Е-11 до Е-12...Е-13 и выше, выросла и высота орбит спутников (с 925 км до 13000 и затем 20000 км), изменилась несущая частота передатчиков (с 400 МГц до 1227 и 1575 МГц).
В течение первого этапа программы Навстар проводилась оценка общей концепции и были разработаны НКА Блок-I. II-й этап полномасштабной разработки и испытаний начался в 1978 г. с запуска первых 4-х НКА (табл. 3.1 подготовлена на 7.4.1999) [I]. В 1995г. система оказалась практически развернутой. В настоящее время в системе находится 26 НКА Блок-11 и два НКА нового поколения Блок-IIR (табл.3.1), запуск которых был осуществлен 22.7.1997 и 7.10.99. НКА Блок-IIR будут запускаться до 2002 г., после чего им на смену придут НКА Блок-IIF.
Глобальная спутниковая система GPS предназначена для высокоточного определения трех координат места, составляющих вектора скорости и времени различных подвижных объектов.
Система разработана по заказу и находится под управлением МО (ВВС) США. В интересах мирового сообщества она используется в соответствии с положениями [З]. Перспективы ее использования определяются также [4]. США предоставляют систему в стандартном режиме для гражданского, коммерческого и научного использования без взимания за это специальной платы. Определено, что за использование системы гражданскими потребителями ответственность несет Министерство транспорта США.
Система GPS состоит из космического сегмента, сегмента управления (наземный командно-измерительный комплекс, КИК) и сегмента потребителей (рис. 3.1).
3.3.1. Орбитальная группировка
Космический сегмент образован орбитальной группировкой, номинально состоящей из 24 основных НКА и 3-х резервных НКА. НКА находятся на 6 круговых орбитах высотой примерно 20000 км, наклонением 55° и равномерно разнесенных по долготе через 60°.
3.3.4. Навигационное сообщение
В навигационном сообщении информационной последовательности GPS содержится информация об эфемеридах НКА, позволяющих рассчитать их координаты и составляющие скорости, альманах созвездия НКА, частотно-временные поправки, метки времени, параметры ионосферной модели, сведения о работоспособности бортовой аппаратуры НКА и др. Эта информация используется в аппаратуре потребителя при решении навигационно-временной задачи по определению координат, скорости и временной поправки к местной шкале времени.
Сегмент управления состоит из сети наземных станций слежения, расположенных по всему миру. Сеть включает главную (ведущую) станцию (ГС), контрольные станции (КС) или станции слежения (СС) и земные станции ввода данных на НКА (три). Главная станция контроля и управления находится на авиабазе Фалкон (Шривер) ВВС США в районе г. Колорадо-Спрингс, штат Колорадо. По данным [10] контрольные станции первоначально были расположены на Гавайях, на авиабазе Элмендорф (Аляска), на о. Гуам и на авиабазе Ванденберг в Калифорнии. В настоящее время КС размещены на атолле Диего-Гарсиа (архипелаг Чагос в Индийском океане), на о. Вознесения (в Атлантическом океане), на Гавайях и атолле Кваджалейн (в Тихом океане); одна КС совмещена с ГС [II]. Как видно, КС расположены сравнительно равномерно по Земному шару вблизи экватора, что создает благоприятные условия для наблюдений НКА. Эти станции принимают сигналы спутников GPS и осуществляют специальные прецизионные измерения дальности до НКА. Главная станция осуществляет сбор измерений от всех КС. Затем все измерения обрабатываются. По ним осуществляются точные расчеты параметров орбит, ионосферной модели и корректирующих поправок для бортовых часов, которые с главной станции через земные станции связи (атолл Диего-Гарсиа, о. Вознесения, атолл Кваджалейн) совместно с данными обработки метеорологической информации, позволяющей уточнить параметры модели тропосферы, передаются на борт каждого НКА. Производится также мониторинг состояния НКА и управление их работой. Основу ГС составляет центр управления с вычислительным комплексом (координационно-вычислительный центр, КВЦ) и средства передачи данных на земную станцию связи с НКА (станция закладки служебной информации, СЗСИ [12]). Канал "Земля - НКА" использует частоту 2227,5 МГц; канал "НКА - Земля" использует частоту 1783,74 МГц [6].
Сегмент управления устанавливает шкалу времени GPS, которая привязана к шкале времени UTC (шкала Универсального координированного времени), поддерживаемой Военно-морской обсерваторией США.
Орбитальные группировки GPS и ГЛОНАСС состоят из 24 спутников. Спутники в GPS расположены в шести, а ГЛОНАСС - в трех плоскостях развернутых соответственно через 60° и через 120° по долготе восходящего узла
Орбитальные параметры систем спутникого позиционирования
Параметр | ГЛОНАСС | GPS |
Число КА в системе | 24 | 24 |
Число орбит. плоск. | 3 | 6 |
Наклон орбиты i | 64,8° | 55° |
Период обращения T | 11 час 16 мин | 11 час 58 мин |
Высота КА | 19100 км | 20150 км |
Если все спутники системы перевести в одну плоскость, то они расположатся равномерно через 15° и образуют "хоровод" вокруг Земли.
Каждый КА проходит по орбите около км. Эксцентриситет орбит - около от 0,02 до 0,001 - орбиты практически круговые
Для круговых орбит имеем:
- угловая скорость обращения КА wc = 2p/T ; радиус-вектор определяется формулой R3 = fMз/wc2; линейная скорость перемещения вдоль орбиты v = wc R; средняя высота над земным шаром H = R - Rз; радиус зоны видимости на земной поверхности S = bRз ; широта "видимости за полюсом" jзп >180° - (b + i).
Геоцентрический угол, определяющий зону радиовидимости спутников, находим по теореме синусов рис. 3:
b = arccos[cos(d) / (1 + H/Rз)] - d,
где d - минимальная высота спутника над горизонтом (маска), устанавливаемая для надежного приема радиосигналов и ослабления влияния атмосферной рефракции.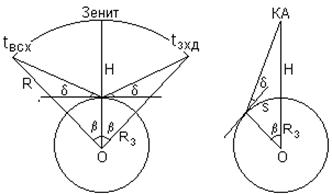
Рис.3. Зоны видимости со станции и с высоты КА
По этой же формуле рассчитывают зону видимости с КА.
Наибольший путь сигнал проходит на предельно низкой высоте над горизонтом, наименьший - вертикально вниз с зенита. Разность этих путей
dS = Rsin(b)/cos(d) - H.
При разных траекториях время нахождения спутника над горизонтом различно. Когда ИСЗ проходит через зенит Z, разность моментов захода и восхода равна
tздх - tвсх = 2b / wn.
Значения рассмотренных выше величин, вычисленные при T = 12 часам, d= 10° и
Rз = 6371 км, даны в табл. 4.
В системах TRANSIT и ЦИКАДА было по 4 - 6 действующих спутников на полярных орбитах высотой около 1000 км. При таком числе спутников дискретность их появления в районе экватора составляла около 2 часов. В высоких широтах периодичность появления спутников уменьшалась. Спутники над горизонтом были видны около 20 минут. В новых системах спутников стало по 24, а высоты орбит увеличились до 20 тыс. км. Появилась возможность в любой точке земного шара одновременно видеть не менее 4 КА. При этом орбиты стали более стабильными, а положения спутников на них - точнее предсказуемыми.
Таблица 4
Показатели движения КА по круговой орбите
Параметр | Показатель |
Угловая скорость обращения wn | 0,5236 рад. час |
Радиус-вектор орбиты R | 26 000 км |
Скорость перемещения вдоль орбиты v | 3,87 км/с |
Средняя высота над земным шаром Н | 20 200 км |
Геоцентр. угол зоны радиовидимости b | 66, 4° |
Радиус видимости на земной поверхости S | 7400 км |
Широта вид. КА по др. сторону полюса | ± 58,6° |
Макс. разность путей радиосигналов dS | 4500 км |
Время вид. над горизонтом (tздх - tвсх) | до 5 час |
В GPS на каждом спутнике имеется эталонный генератор основной частоты fо = 10,23 МГц, из колебаний которого образуются сигналы, обозначаемые как L1 и L2. Они используются в качестве несущих для передачи кодов и посылки данных, а также для наиболее точных измерений дальностей фазовым методом. Их частоты и длины волн соответственно равны
fL1 = 154 fо, fL2 = 120 fо, 1 = 19,0 см, 2 = 24,4 см
Для определений дальностей генерируют коды двух типов - P и C/A. Код P трактуется как точный (Precision) или защищенный (Protected). Он предназначен для военных.
Для остальных пользователей в любое время может быть введен режим избирательного доступа SA (Selective Availability), при котором с целью понижения точности измерений преднамеренно накладываются флюктуации на фазу дальномерного кода и вносятся дополни-тельные погрешности в эфемеридную информацию. В GPS предусмотрена еще одна мера защиты сигнала от несанкционированного пользователя - режим дополнительного шифрования AS (Anti Spoofing), когда P-код при помощи нелинейной функции W(t) переводится в новый Y-код. В аппаратуре военных пользователей функция W(t) известна и используется при демодуляции Y-кода.
C/A-код разработан для гражданского пользователя. Его определяют как грубый (Coarse
Aquisition), легко доступный (Clear Accessible), легко обнаруживаемый (Clear Aquisition),
гражданский (Civil Application) или стандартный (S - Standard).
Несущий сигнал L1 одновременно модулирован обоими C/A и P кодами, но фазы этих модуляций сдвинуты относительно друг друга на 90о. Сигнал L2 модулирован P-кодом и не несет C/A-кода. Оба сигнала L1 и L2 модулированы также данными, посылаемыми с КА. Модуляция такая же - ФМ. Поток сообщений каждого спутника состоит из 25 блоков по 1500 бит. Каждый блок разбит на 5 подблоков по 300 бит. Трансляция подблока занимает 6 с, блока - 30 с, всего сообщения - 12,5 минут. В каждом подблоке 10 слов по 30 бит, из которых первое слово содержит телеметрическую информацию, а второе - метки времени. За этими словами в подблоках 2 и 3 - эфемериды с кеплеровыми элементами орбиты спутника (они действительны лишь на короткое время для части его орбиты). Указанные подблоки повторяют в каждом блоке. Подблоки 4 и 5 несут данные о поправках на влияние ионосферы, параметры шкалы времени данного КА, сведения о здоровье спутника, а также альманах - сборник менее точных данных о местонахождении всех спутников. Альманах нужен для планирования и проектирования измерений. Информация подблоков 4 и 5 разделена на 25 страниц, передается постранично и
повторяется через 12,5 минут. Наиболее важные сведения потока сообщений обычно обновляют через каждые 4 часа. В GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код. Разделение сигналов кодовое.
В ГЛОНАСС все сигналы модулированы одними и теми же высокой (ВТ) или стандартной (СТ) точности кодами. Каждый спутник работает на собственных частотах. Разделение сигналов частотное. Значения частот:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
