


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Значения погрешностей DGPS-режима приведены в таблице 3.2.
Таблица 3.2
Значения погрешностей DGPS-режима
Источники и виды погрешностей | При использовании Р-кода (м) | При использовании С/А-кода (м) |
Возмущения орбиты и немодулируемые уходы ШВ. Задержка сигнала в тропосфере Шумы приемника Многолучевость распространения Прочие источники Эквивалентные СКП измерения дальности | 2.7 2.0 1.5 1.2 1.0 4.0 | 2.7 2.0 5.0 1.2 1.0 6.0 |
Погрешности определения местоположения наблюдателя (погрешности координат) зависят от благоприятности геометрии созвездия спутников. К оптимальной геометрии относят варианты, когда PDOP < 3, тогда координаты определяют с погрешностями 12 м (по Р-коду) и 18 м (по С/А-коду).
3.4. Фазовые измерения
3.4.1. Уравнение фазы несущих колебаний
Фазовыми методами выполняются наиболее точные измерения расстояний между
спутником i и приемником А. Фазой сигнала y называют величину прямо пропорциональную времени, которая определяется уравнением
![]() , (3.15)
, (3.15)
где w = 2p× f - круговая несущая частота f1 или f2, t - текущее время.
Фаза y измеряется в градусах, в радианах или в циклах по 2p. Для выполнения фазовых измерений используются гармонические сигналы несущих частот. Мгновенные значения гармонических сигналов являются периодическими функциями и имеют вид:
![]() (3.16)
(3.16)
где ![]() - период колебаний, U – амплитуда колебаний, n – целое число.
- период колебаний, U – амплитуда колебаний, n – целое число.
Для обсуждения понятий, связанных с фазовыми измерениями положим, что имеются идеальные условия наблюдений: спутник неподвижен, электромагнитные колебания генераторов спутника в космосе и приемника на Земле строго синхронизированы [71]. Поступающие в приемник ЭМВ от спутника преобразуются в электрические сигналы и совместно с гармоническим сигналом приемника поступают на вход фазометра для измерений разности фаз.
Тогда фазы спутника ![]() и приемника
и приемника![]() в момент приема t можно представить выражениями:
в момент приема t можно представить выражениями:
![]() (3.17)
(3.17)
где ![]() - временная задержка, затрачиваемая сигналом спутника на прохождение расстояния до приемника.
- временная задержка, затрачиваемая сигналом спутника на прохождение расстояния до приемника.
Первая формула в уравнениях (3.17) показывает, что сигнал в приемнике от спутника появится в момент времени t, если он будет излучаться спутником раньше на величину временной задержки ![]() . Поэтому в этой формуле
. Поэтому в этой формуле ![]() используется со знаком минус. Измерение расстояний фазовым методом в GPS основано на том, что разность фаз
используется со знаком минус. Измерение расстояний фазовым методом в GPS основано на том, что разность фаз ![]() между гармоническими (синусоидальными) колебаниями сигналов спутника и приемника пропорциональна времени запаздывания
между гармоническими (синусоидальными) колебаниями сигналов спутника и приемника пропорциональна времени запаздывания ![]() и определяется по формуле:
и определяется по формуле:
![]() . (3.18)
. (3.18)
Изменению фазы сигнала на 2p или 1 цикл соответствует в линейной мере длина волны l. Фаза волн, пришедших от спутника i будет отставать от фазы местных колебаний приемника А пропорционально геометрическому расстоянию ![]() . При этом в процессе распространения сигнала от спутника к приемнику фаза y i(t) может многократно изменяться на величину кратную 2p. Известно, что приборы предназначенные для определения разности фаз – фазометры могут измерять лишь в пределах от 0 до 2p. Целое число N изменений фазы на 2p , неизмеряемое приемником, принято называть целочисленной неоднозначностью фазовых циклов. В таком случае значение разности фаз можно представить уравнением [65]:
. При этом в процессе распространения сигнала от спутника к приемнику фаза y i(t) может многократно изменяться на величину кратную 2p. Известно, что приборы предназначенные для определения разности фаз – фазометры могут измерять лишь в пределах от 0 до 2p. Целое число N изменений фазы на 2p , неизмеряемое приемником, принято называть целочисленной неоднозначностью фазовых циклов. В таком случае значение разности фаз можно представить уравнением [65]:
![]() = 2p×N + Dy = 2p×(N + DN), (3.19)
= 2p×N + Dy = 2p×(N + DN), (3.19)
где Dy - фазовый домер ( 0£ Dy < 2p), ![]() – дробная часть фазового цикла (0£ DN < 1).
– дробная часть фазового цикла (0£ DN < 1).
Отсюда следует, что фазометр измеряет не ![]() , а лишь Dy и для определения необходимо знать число N.
, а лишь Dy и для определения необходимо знать число N.
Далее перейдем к модели, учитывающей движение спутника. Тогда временная задержка будет функцией времени t и определится как
![]() ,
,
а расстояние ![]() (t) - по формуле
(t) - по формуле
![]() , (3.20)
, (3.20)
где V- скорость распространения ЭМВ в атмосфере, ![]() - длина волны.
- длина волны.
В литературе по GPS используется не общепринятое значение разности фаз , а нормированное по 2p значение разности фаз, определяемое выражением
![]() (3.21)
(3.21)
где ![]() - измеряемое значение разности фаз фазометром приемника. Отсюда сразу видно удобство в использовании именно нормированных значений разностей фаз, поскольку в этом случае
- измеряемое значение разности фаз фазометром приемника. Отсюда сразу видно удобство в использовании именно нормированных значений разностей фаз, поскольку в этом случае ![]() представляется непосредственно в циклах, что сокращает запись уравнений.
представляется непосредственно в циклах, что сокращает запись уравнений.
Следовательно, фазометр позволяет определять только значение Dj(t) =DN(t). Разность фаз Dj между синусоидальным сигналом, пришедшим со спутника и выра - ботанном в приемнике в пределах одного фазового цикла, прямопропорциональна временному интервалу 0 < Dt < Т между переходами через нуль из отрицательных к положительным значениям сигналов (рис. 3.8).
Инструментальная погрешность фазовых измерений оценивается величиной 0.01 длины волны. Для частоты f1 c длиной волны 19см она составит не более 2 мм. Таким образом, однозначно в линейной мере можно измерить только величину l×DN.
Число N остается неизвестным. Если длина волны 19 см, то расстояние, каким бы оно ни было, фиксируется только в пределах этого отрезка. Учитывая, что высота полета спутника H=км, нетрудно подсчитать, что число N будет более 108. Задача определения числа N называется разрешением неоднозначности и более подробно бу дет рассмотрена в дальнейшем.
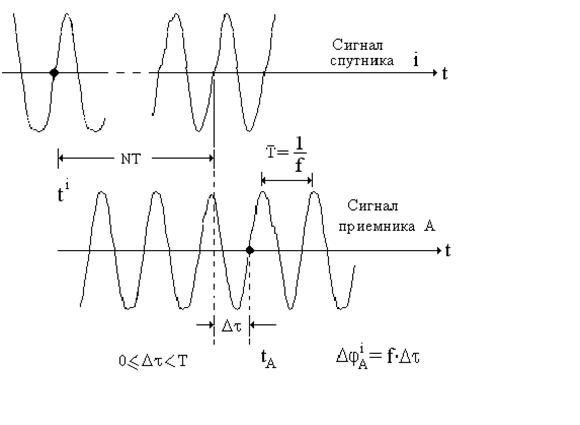 |
Рис. 3.8. Фазовые измерения в GPS-приемнике
Принципиально важно отметить еще одно обстоятельство. Как только приемник принял сигнал спутника, он начинает c эпохи t1 отслеживать и измерять изменения разностей фаз Dj iA(t), обусловленных относительными движениями спутников и приемника. Поэтому дополнительно измеряемая величина изменения разностей фаз содержит не только долю, но и целое число циклов n, фиксируемых с момента вхождения в синхронизм t1 с принимаемым сигналом от спутника. Для начального момента времени t1 счетчик числа n обнуляется, то есть n(t1)=0 . По мере изменений разностей фаз на 2p в моменты времени t > t1 счетчик увеличивает число n на 1 при увеличении расстояния между спутником и приемником и удаляет 1 из n, если расстояние между спутником и приемником убывает. Такой режим счета называется реверсивным.
В общем виде формула для расстояния, определяемого фазовым методом, может быть представлена уравнением
![]() , (3.22)
, (3.22)
где ![]() - дробная часть фазового цикла
- дробная часть фазового цикла  .
.
Пусть имеется серия наблюдений дальностей ![]() между приемником А спутником i без потерь (срывов) циклов (рис.3.9). Для простоты записи обозначений эпох наблюдений в уравнениях вместо tk будем использовать их номера k. Поскольку в приемнике А измерения разности фаз j ведутся начиная с первой эпохи 1 и далее фиксируется целое число изменений разности фаз n, то для 2 эпох результаты наблюдений можно представить следующими уравнениями
между приемником А спутником i без потерь (срывов) циклов (рис.3.9). Для простоты записи обозначений эпох наблюдений в уравнениях вместо tk будем использовать их номера k. Поскольку в приемнике А измерения разности фаз j ведутся начиная с первой эпохи 1 и далее фиксируется целое число изменений разности фаз n, то для 2 эпох результаты наблюдений можно представить следующими уравнениями
![]() , (3.23)
, (3.23)
![]() , (3.24)
, (3.24)
где ![]() и Dj(k) – определяемые расстояния и измеренные значения разности фаз от приемника А до спутника i на эпохи k = 1,2, l1 – длина волны несущей частоты, – неизвестное число фазовых циклов в первой эпохе наблюдений,
и Dj(k) – определяемые расстояния и измеренные значения разности фаз от приемника А до спутника i на эпохи k = 1,2, l1 – длина волны несущей частоты, – неизвестное число фазовых циклов в первой эпохе наблюдений, ![]() – изменения целого числа фазовых циклов с начала измерения разности фаз до эпохи t2.
– изменения целого числа фазовых циклов с начала измерения разности фаз до эпохи t2.
Рис.3.9. Схема наблюдений приемником А спутника i в эпохи 1 и 2 .
Однако по-прежнему остается неизвестным число циклов ![]() , которое было до установления связи, и неоднозначность измерений не устраняется. Задача усложняется несинхронностью колебаний генераторов на спутниках и в приемниках, чтоведет к измерению не дальностей, а псевдодальностей и в дополнительном уходе частоты вследствие непрерывного изменения пространственного положения спутника и приемника.
, которое было до установления связи, и неоднозначность измерений не устраняется. Задача усложняется несинхронностью колебаний генераторов на спутниках и в приемниках, чтоведет к измерению не дальностей, а псевдодальностей и в дополнительном уходе частоты вследствие непрерывного изменения пространственного положения спутника и приемника.
C учетом реальных условий прохождения ЭМВ спутника в атмосфере и отражений радиоволн от земной поверхности и окружающих GPS-антенну предметов разность фаз колебаний несущей частоты, измеренную в приемнике, можно представить уравнением
(3.24)
где NiA(1) - неизвестное целое число фазовых циклов на эпоху начала фазовых
измерений, IiA,j(t) - поправка за влияние ионосферы, ТiA(t) - тропосферная поправка, dA,j(t) и dij(t) - аппаратурные фазовые задержки приемника и спутника, diA,j(t) – искажение фазы, вызванное многопутностью, ej - случайные погрешности фазовых измерений.
3.4.2. Эффект Доплера
Пока волна идет от спутника до приемника, расстояние до него с некоторой скоростью и ускорением или растет, или убывает. Вместе со спутником перемещается его передатчик. Вследствие этого возникает эффект Доплера, выражающийся в изменении частоты принимаемых GPS-приемником сигналов. Если спутник движется навстречу приемнику, последний принимает в единице времени большее количество волн по сравнению с неподвижным спутником. Это означает, что принимаемые волны стали короче, а частота колебаний – больше. С удалением спутника картина меняется на обратную: принимаемые волны удлиняются, а частота уменьшается.
Поэтому приемнику необходим поиск сигнала в диапазоне возможных доплеровских частот и принудительная подстройка под его частоту. Для этого по ранее принятым координатам спутников и априорным данным о координатах приемника автоматически подсчитывается величина доплеровской частоты. На момент фазовых измерений в приемнике пользователя дальность складывается из двух частей: расстояния пройденного волной, и прироста расстояний вследствие перемещения за это же время спутника по орбите. Этот факт выражается следующим уравнением
![]() , (3.25)
, (3.25)
где ![]() –время прохождения сигнала в вакууме от спутника к приемнику. Здесь индекс Т означает, что записана фаза сигнала в момент излучения на спутнике. Фазы приемника и спутника для номинального времени t и истинного времени tr cвязаны через поправки часов уравнениями:
–время прохождения сигнала в вакууме от спутника к приемнику. Здесь индекс Т означает, что записана фаза сигнала в момент излучения на спутнике. Фазы приемника и спутника для номинального времени t и истинного времени tr cвязаны через поправки часов уравнениями:
jA(t r) = jA(t) + f dtA , (3.26)
jS A(t r -tS A ) = jS A(t -tS A) + f dtS. (3.27)
Решая (3.26) относительно jA(t) и объединяя (3.26) с (3.24), получим:
jA(t r) = jA(tr) + f dtA, (3.27)
ji(tr) = ji T(tr -ti A) + f dti.
Подставляя эти два уравнения в (3.26) и отбрасывая, только в данном случае не существенные задержки, запишем [137]
jiA(t ) = jA(tr) + jiT(tr - tiA) - f dtA + f dti + ![]() (1). (3.28)
(1). (3.28)
Поскольку время прохождения сигнала ![]() между спутником и приемником составляет около 70 мс, то за это время частота атомного стандарта изменяется, что влечет за собой искажения фазы сигнала. Мгновенное значение частоты f(t) связано с фазой сигнала j(t) уравнением
между спутником и приемником составляет около 70 мс, то за это время частота атомного стандарта изменяется, что влечет за собой искажения фазы сигнала. Мгновенное значение частоты f(t) связано с фазой сигнала j(t) уравнением
![]() , (3.29)
, (3.29)
где ![]() - cкорость измерения фазы.
- cкорость измерения фазы.
Применительно к составляющей  в уравнении (3.28), воспользуемся простой линейной моделью скорости изменения фазы
в уравнении (3.28), воспользуемся простой линейной моделью скорости изменения фазы
 , (3.30)
, (3.30)
где ![]() и
и ![]() являются соответственно смещением частоты и дрейфом частоты в зависимости от времени излучения.
являются соответственно смещением частоты и дрейфом частоты в зависимости от времени излучения.
Влияние эффекта Доплера можно учесть, используя уравнение
![]() , (3.31)
, (3.31)
где ![]() - скорость изменения топоцентрического расстояния. С учетом (3.31), а также ионосферных и тропосферных поправок и других задержек представим формулу для измеряемых фазометром значений в следующем виде
- скорость изменения топоцентрического расстояния. С учетом (3.31), а также ионосферных и тропосферных поправок и других задержек представим формулу для измеряемых фазометром значений в следующем виде
 (3.32)
(3.32)
Это выражение показывает, что ошибка часов приемника оказывает влияние на результаты измерений двумя путями: большая часть есть произведение ![]() и меньшая часть зависит от скорости изменения топоцентрического расстояния. Ошибка часов приемника
и меньшая часть зависит от скорости изменения топоцентрического расстояния. Ошибка часов приемника ![]() порядка 1 нс величина
порядка 1 нс величина ![]() вносит вклад 1.5 цикла. Это примерно в 150 раз превышает ожидаемую точность измерений. Для фазовых измерений с точностью 0.01 цикла требуется точность часов приемника около 0.01 нс.
вносит вклад 1.5 цикла. Это примерно в 150 раз превышает ожидаемую точность измерений. Для фазовых измерений с точностью 0.01 цикла требуется точность часов приемника около 0.01 нс.
Составляющая, учитывающая эффект Доплера  для ошибки часов 1 мкс составляет 0.004 цикла при скорости
для ошибки часов 1 мкс составляет 0.004 цикла при скорости ![]() < 800 м/c. Этот вклад является геометрически зависимым и обращается в нуль при изменении знака при подъеме и уходе спутника над горизонтом. Если часы приемника имеют ошибку меньше 0.1 мкс, то влиянием эффекта Доплера пренебрегают [137].
< 800 м/c. Этот вклад является геометрически зависимым и обращается в нуль при изменении знака при подъеме и уходе спутника над горизонтом. Если часы приемника имеют ошибку меньше 0.1 мкс, то влиянием эффекта Доплера пренебрегают [137].
Ошибка часов спутника также воздействует на фазу наблюдаемого сигнала через большую составляющую ![]() и малую составляющую
и малую составляющую ![]() . Последняя составляющая зависит от времени прохождения от спутника к приемнику. Уравнение (3.32) дает полное представление о возможностях неразностных фазовых измерений на несущих волнах. Поскольку существуют линейные отношения между ошибками часов и другими факторами, то, вероятно, необходимо моделировать комбинационные эффекты некоторых параметров через эпохи или наблюдения. К счастью, большинство составляющих этих ошибок исключается или уменьшается за счет использования разностных приемов, рассматриваемых в следующих разделах.
. Последняя составляющая зависит от времени прохождения от спутника к приемнику. Уравнение (3.32) дает полное представление о возможностях неразностных фазовых измерений на несущих волнах. Поскольку существуют линейные отношения между ошибками часов и другими факторами, то, вероятно, необходимо моделировать комбинационные эффекты некоторых параметров через эпохи или наблюдения. К счастью, большинство составляющих этих ошибок исключается или уменьшается за счет использования разностных приемов, рассматриваемых в следующих разделах.
Весьма показательными являются сравнение фазовых несущих выражениями (3.32) с уравнениями псевдорасстояний (3.5). Кроме основного масштабного фактора ![]() эти два уравнения отличаются только потому, что частота спутника смещена на величину
эти два уравнения отличаются только потому, что частота спутника смещена на величину![]() .
.
Поэтому уравнение несущих фазовых измерений было получено тем же самым путем что и уравнение для псевдорасстояний. Малое смещение ![]() часто не принимается во внимание или добавляется в вычисления фазы со смещенной частотой.
часто не принимается во внимание или добавляется в вычисления фазы со смещенной частотой.
3.5. Разности измерений
Для исключения систематических и ослабления коррелированных погрешностей при обработки фазовых измерений широко используют фазовые разности измерений приемников А и В и наблюдения спутников. Из этих измерений образуют разности трех типов: первые разности, двойные разности и тройные разности. Использование разностей позволяет на коротких расстояниях до 20 км снизить погрешности с метрового уровня до миллиметрового.
3.5.1. Первые разности
Если два приемника А и В принимают сигналы с одного и того же cпутника i в одинаковые эпохи, то можно записать для них два уравнения типа (3.33). Одиночные разности фаз наблюдений между приемниками часто называют первыми разностями, которые определяют
 (3.33)
(3.33)
Заметим, что индексами А и В в ![]() обозначена разность показаний, полученных различными операторами
обозначена разность показаний, полученных различными операторами ![]() минус
минус ![]() . Следуя одинаковым преобразованиям, получим:
. Следуя одинаковым преобразованиям, получим:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
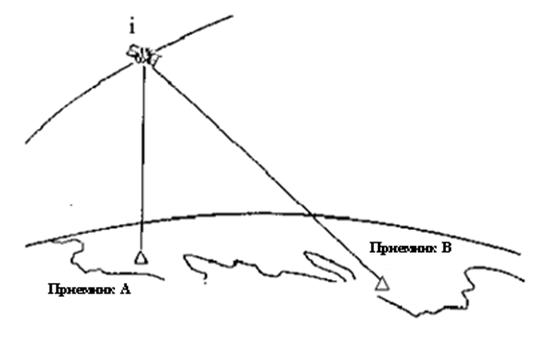 |
Рисунок 3.10 показывает общий подход к определению одиночных разностей.
Рис. 3.10. Геометрическое представление метода первых разностей.
Принципиальным преимуществом одиночных разностей является, что большая часть ошибок полученных со спутника исключается. Например, ошибки часов спутника исключаются, а остаточная составляющая ухода частоты часов спутника стремится к нулю. Аппаратурные задержки сигналов спутника также стремятся к нулю. Все эти ошибки исключаются, т. к. они достаточно стабильны. Напомним, что время приема одно и то же, а время излучения слегка различно, потому что различны расстояния между спутником и двумя приемниками А и В. Однако, первые разности остаются чувствительными для ошибок часов приемников dtA и dtB.
3.5.2. Двойные разности
Если два приемника А и В наблюдают два спутника i и j в одинаковое время, то образуют двойные разности
 (3.34)
(3.34)
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ; (3.35)
; (3.35)
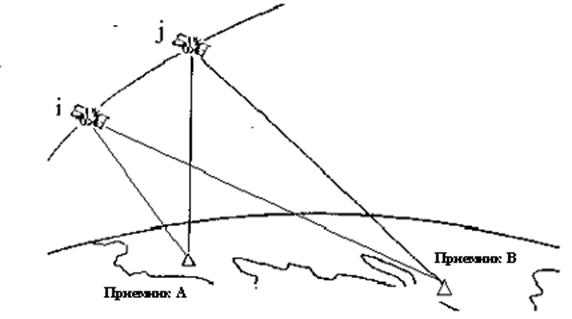 |
На рис. 3.11 дано изображение метода двойных разностей.
Рис. 3.11. Графическое изображение геометрии двойных разностей.
Вторые разности – основной материал, используемый в дальнейшей обработке с целью получения высокоточных значений приращений координат между определяемой и базовой станцией.
Наблюдениями в одну эпоху не ограничиваются. Для каждой эпохи могут быть сформированы вторые разности. Тогда из вторых разностей, отнесённых к разным эпохам, формируют тройные разности.
3.5.3. Тройные разности
Тройные разности есть разность между двумя двойными разностями между различными эпохами
![]() (3.35)
(3.35)
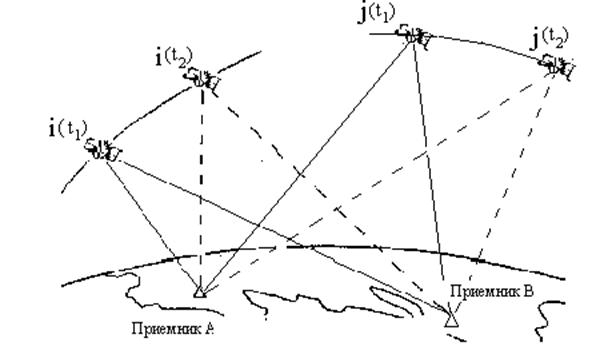 |
Схема демонстрирующая концепцию тройных разностей представлена на рис. 3.12.
Рис. 3.12. Схема, реализующая принцип тройных разностей.
Допуская возможность фазовой синхронизации, начальные значения неоднзначностей в уравнении (3.33) для ![]() исключаются. Заметим, что двойные и тройные разности имеют одинаковую чувствительность к ошибкам частот и смещений частот спутников.
исключаются. Заметим, что двойные и тройные разности имеют одинаковую чувствительность к ошибкам частот и смещений частот спутников.
Тройные разности могут быть вычислены в различном порядке. Рассмотрим следующее
![]()
 (3.36)
(3.36)
В тройных разностях отсутствуют значения целых чисел неоднозначностей. Решение тройных разностей часто предусматриваются техникой обработки результатов измерений для получения хорошей аппроксимации двойных разностей. Основным преимуществом тройных разностей является возможность получения информации для восстановления прерванных циклов измерений или исключения их из обработки. В результате наблюдения, свободные от прерванных циклов, можно использовать в определении двойных разностей. таким образом, из вычислений тройных разностей получают дополнительные разности от времени, позволяющие получать более строгие геометрические решения.
3.6. Фазовый дифференциальный режим (относительные определения)
При относительном режиме навигационные измерения выполняются по одним и тем же совокупностям спутников в совпадающие, либо близкие моменты с двух пунктов. По результатам этих измерений вычисляются геоцентрические координаты этих пунктов (X1, Y1, Z1), (X2, Y2, Z2). Вычитание одноименных компонент местоположений позволяет определить проекции базовой линии, соединяющей пункты, т. е.
 (3.37)
(3.37)
Расстояние между пунктами рассчитывается как
![]() , (3.38)
, (3.38)
а направляющие углы, характеризующие ориентирование базовой линии в пространстве, определяются соотношениями
 (3.39)
(3.39)
Рис. 3.13.
Для обеспечения обработки измерений необходимо передавать получаемые данные с одного пункта на другой или с обоих пунктов на объект совместной обработки.
Для повышения точности измерения накапливаются в виде массивов и в дальнейшем обрабатываются совместно. Достоинством относительных определений является то, что ряд погрешностей, имеющих систематический характер, компенсируется при вычислении базовой линии. Это позволяет более точно определять местоположение одного пункта относительно другого.
Реализация режима относительных определений требует точной частотной и временной синхронизации GPS-приемников на пунктах А и В. Практически, на момент измерений имеется начальное смещение шкал времени, а также их дрейф, приводящие к погрешностям. Компенсация этих погрешностей осуществляется применением разностных измерений при обработке регистрируемых параметров сигналов, особенно при фазовых измерениях. При вычислении расстояний между пунктами в обработку измерений включаются преимущественно двойные разности фаз несущих колебаний.
3.7 Разрешение неоднозначности для фазовых
GPS-измерений на несущих частотах
Фазовые измерения, используемые в относительных методах определения приращений координат, являются неоднозначными из-за неизвестного количества циклов изменения фазы за время прохождения сигнала от спутника до приемника. Однако для получения высокой точности присущей частоте несущих колебаний, поступающих в приемник сигналов, это целое число должно быть определено. Возможно, что в процессе наблюдений сигнал прерывается и происходит потеря циклов. В результате возникает задача восстановления прерванных циклов.
Основная проблема состоит в том, чтобы определить целое число фазовых циклов сигнала принятого со спутника, поскольку разности фаз измеряются фазометром однозначно лишь в пределах от 0 до 2p, что соответствует дробной части фазового цикла Dj от 0 до 1. После приема сигнала фазометр подсчитывает специальным счетчиком изменение целого числа циклов n и текущее дробное значение фазы 0 £ Dj < 1. Следовательно, начальное (неизвестное) целое количество циклов, отнесенное к первой эпохе, является одним и тем же для отдельной серий наблюдений одного спутника.
Задача неоднозначности, т. е. нахождения целого числа фазовых циклов, может быть решена, если измерения являются достаточно точными. В идеальном случае величины параметров смещения, получаемые из предварительного решения, будут близки к целым числам, а неопределенности будут меньше, чем половина одного цикла. Поскольку на практике это требование не выполнимо, то вычисления округляются до ближайшего целого числа, а решение базирующееся на способе наименьших квадратов, повторяется со смещениями, поддерживаемыми фиксированными для этих величин. Отклонения от целых чисел могут быть приписаны влиянию шумов и ошибкам вводимых поправок. Следует отметить, что существует большое количество конкурирующих фирм, выпускающих GPS – приемники и использующие свои алгоритмы разрешения неоднозначности, которые полностью не публикуются.
3.7.1 Одночастотный метод разрешения неоднозначности
Рассмотрим GPS-наблюдения, выполненные на несущей частоте f1 и Р-коде. Основную проблему разрешения неоднозначности в упрощенном виде можно представить в следующим образом. Пусть имеется серия наблюдений дальностей ![]() между приемником А спутником i без срывов циклов (рис.3.10). Для простоты записи обозначений эпох наблюдений в уравнениях вместо tk будем использовать их номера k. Поскольку в приемнике А измерения разности фаз j ведутся начиная с первой эпохи 1 и далее фиксируется целое число изменений разности фаз n, то для q эпох результаты наблюдений можно представить следующими уравнениями
между приемником А спутником i без срывов циклов (рис.3.10). Для простоты записи обозначений эпох наблюдений в уравнениях вместо tk будем использовать их номера k. Поскольку в приемнике А измерения разности фаз j ведутся начиная с первой эпохи 1 и далее фиксируется целое число изменений разности фаз n, то для q эпох результаты наблюдений можно представить следующими уравнениями
 (3.40)
(3.40)
где ![]() и j(k) – определяемые расстояния и измеренные значения разности фаз от приемника А до спутника i на эпоху k = 1,2, ...,q ;
и j(k) – определяемые расстояния и измеренные значения разности фаз от приемника А до спутника i на эпоху k = 1,2, ...,q ;
l1 – длина волны несущей частоты f1;
![]() (1) – неизвестное число фазовых циклов в первой эпохе наблюдений;
(1) – неизвестное число фазовых циклов в первой эпохе наблюдений;
![]() – изменения целого числа фазовых циклов с начала измерения разности фаз, фиксируемых приемником в процессе измерений разности фаз на соответствующую эпоху k = 2,3, ...,q.
– изменения целого числа фазовых циклов с начала измерения разности фаз, фиксируемых приемником в процессе измерений разности фаз на соответствующую эпоху k = 2,3, ...,q.
По результатам фазовых измерений со среднеквадратической погрешностью sj на частоте f1 можно составить систему из q уравнений с q+1 неизвестным. Неизвестными здесь являются q значений расстояний ![]() и целое число фазовых циклов
и целое число фазовых циклов![]() (1). Используя по C/A или Р-кодовым наблюдениям расстояния
(1). Используя по C/A или Р-кодовым наблюдениям расстояния ![]() , измеряемые со среднеквадратической погрешностью sр >> l1 sj и исправленные за влияния атмосферы и поправки часов на спутник i, в соответствующие эпохи путем их подстановки в уравнение (3.30) вместо
, измеряемые со среднеквадратической погрешностью sр >> l1 sj и исправленные за влияния атмосферы и поправки часов на спутник i, в соответствующие эпохи путем их подстановки в уравнение (3.30) вместо ![]() , можно определить q приближенных значений
, можно определить q приближенных значений ![]() (1) по приведенным ниже формулам
(1) по приведенным ниже формулам
 (3.41)
(3.41)
В этом случае избыточное число наблюдений позволяет определить значение ![]() по спосoбу наименьших квадратов. Техника фазовых наблюдений значительно сложнее техники кодовых измерений. В первую очередь здесь возникает необходимость обеспечения измерений непрерывной фазы несущей. При наблюдениях кодовым приемником каждое измерение производится независимо от остальных. Потеря захвата какого-либо спутника не влияет на полноту остальных данных. Поэтому в принципе можно ограничиться однократным фиксированием координат, если удовлетворяет их точность. При фазовых измерениях наблюдений одной эпохи недостаточно для определения целочисленных неоднозначностей фазовых отсчетов. Поэтому наблюдения занимают достаточно длительный интервал времени, чтобы приемники успели набрать достаточный объем данных для уменьшения большой случайной составляющей погрешности Р-кодовых измерений sр. В этом случае повышение точности Р – кодовых измерений, за счет ослабления влияния случайных погрешностей, можно оценить по формуле
по спосoбу наименьших квадратов. Техника фазовых наблюдений значительно сложнее техники кодовых измерений. В первую очередь здесь возникает необходимость обеспечения измерений непрерывной фазы несущей. При наблюдениях кодовым приемником каждое измерение производится независимо от остальных. Потеря захвата какого-либо спутника не влияет на полноту остальных данных. Поэтому в принципе можно ограничиться однократным фиксированием координат, если удовлетворяет их точность. При фазовых измерениях наблюдений одной эпохи недостаточно для определения целочисленных неоднозначностей фазовых отсчетов. Поэтому наблюдения занимают достаточно длительный интервал времени, чтобы приемники успели набрать достаточный объем данных для уменьшения большой случайной составляющей погрешности Р-кодовых измерений sр. В этом случае повышение точности Р – кодовых измерений, за счет ослабления влияния случайных погрешностей, можно оценить по формуле

где q- количество кодовых измерений, участвующих в определении ![]() . Этими уравнениями был продемонстрирован лишь возможный путь к решению задачи разрешения неоднозначности. Гораздо большее практическое значение имеют задачи разрешения неоднозначности, возникающие при использовании двойных разностей фаз в относительном режиме измерений.
. Этими уравнениями был продемонстрирован лишь возможный путь к решению задачи разрешения неоднозначности. Гораздо большее практическое значение имеют задачи разрешения неоднозначности, возникающие при использовании двойных разностей фаз в относительном режиме измерений.
3.7.2 Разрешение неоднозначности в относительном режиме
с использованием двойных разностей на одной несущей частоте
Двойные разности фаз несущих сигналов включаются в обработку при вычислении приращений координат. При этом, измерения фаз несущих частот сопровождаются неоднозначностью определения целых чисел фазовых циклов. Для нахождения координат с заданной точностью и с разрешением неоднозначности на одной несущей используется метод последовательных приближений (итераций).
Определение целых чисел фазовых циклов в относительном режиме GPS-измере-ний является не самоцелью, а средством для определения точных значений приращений координат Dx, Dy и Dz. Поэтому целесообразно рассмотреть алгоритмы, позволяющие вычислять целые числа фазовых циклов и приращения координат одновременно. Воспользуемся для этих целей вторыми разностями, исключающими большую часть систематических погрешностей сопровождающих измерительный процесс.
Положим, что координаты базового приемника А используются как безошибочные, а определяются приращения координат полевого приемника В. Из кодовых наблюдений можно определить геоцентрические приближенные координаты ![]() в точке стояния приемника В. Обозначим точные координаты пунктов А и В геоцентрическими векторами
в точке стояния приемника В. Обозначим точные координаты пунктов А и В геоцентрическими векторами ![]() и
и ![]() . Тогда задача определения координат пункта В будет решена, если определить вектор приращений координат
. Тогда задача определения координат пункта В будет решена, если определить вектор приращений координат ![]() путем вычисления поправок
путем вычисления поправок ![]() в приближенные координаты
в приближенные координаты ![]() пункта В. Это можно записать следующими уравнениями
пункта В. Это можно записать следующими уравнениями

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
