
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Наблюдения в реальном времени (абсолютные или дифференциальные) предполагают, что полученное положение будет доступно непосредственно на месте позиционирования, пока наблюдатель находится на станции. Пост-обработка предполагает получение результатов после ухода с пункта наблюдений.
В каждом из трех указанных методов определений координат возможны измерения как по кодовым псевдодальностям, так и по фазе несущей. Точность кодовых дальностей имеет метровый уровень, в то время как точность фазовых измерений лежит в миллиметровом диапазоне. Точность кодовых дальностей, однако, можно улучшить, если использовать метод узкого коррелятора или методику сглаживания по фазе. В отличие от фаз несущих колебаний, кодовые дальности фактически не содержат неоднозначностей. Это делает их невосприимчивыми к потерям счета циклов (то есть изменениям неоднозначностей фазы) и в некоторой степени к препятствиям на пункте. Решающим моментом в спутниковых фазовых измерениях является разрешение неоднозначностей фазы.
Точность абсолютного метода позиционирования по кодовым GPS измерениям определяется возможностями Службы стандартного позиционирования (SPS) или Службы точного позиционирования (PPS). При выключенном режиме выборочной доступности SA гражданским пользователям стандартное GPS позиционирование обеспечивает в 95% случаев точность 15 м. Возможности абсолютного метода по измерениям фазы ограничиваются точностью эфемерид спутников. Использовать бортовые эфемериды спутников при их точности в несколько метров нецелесообразно, а точные апостериорные эфемериды появляются с большой задержкой. Поэтому абсолютное позиционирование по фазе несущей применяется редко.
Таблица 9.1. Характеристики точности дифференциального и относительного методов определения координат (по книге [Botton et al. 1997]).
№№ п. п. | Метод измерений | Тип аппаратуры | Длина (км) | Продолж. сеанса | Тип эфе-мерид | Программ. обеспечение | Точность |
1 | Дифференц. GPS | кодовая | до 500 | неск. минут | бортовые | коммерческое | 1-5 м |
2 | WADGPS 1) | кодовая | по земн. шару | неск. минут | - " - | - " - | 1 м |
3 | фазовый, 2) статика | фазовая одночастот. | До 50 | 15 мин.-1час | - " - | - " - | 2мм+10-5D |
4 | - " - | до 5 | неск. сек. | - " - | - " - | 2мм+5×10-6D | |
5 | кинематика, с иниц. OTF | - " - | до 5 | до неск. мин. | - " - | - " - | 2мм+4×10-6D |
6 | кинематика, с иниц. OTF | фазовая, двухчастот. | До 10 | до неск. мин. | - " - | - " - | 2мм+3×10-6D |
7 | быстрая статика | фазовая, одночастот. | до 7 | неск. мин. на точку | - " - | - " - | 2мм+2×10-6D |
8 | быстрая статика | фазовая, двухчастот. | До 20 | неск. мин. на точку | - " - | - " - | 2мм+2×10-6D |
9 | статика | фазовая, одночастот. | До 15 | 45 мин. на точку | - " - | - " - | 2мм+2×10-6D |
10 | статика | двухчастотная | 1 1 | от 1до 4 часов | бортовые точные | - " - - " - | 2мм+2×10-6D 2мм+2×10-7D |
11 | статика | фазовая, двухчастот. | До 2000 | от неск. часов до неск. суток | точные | Специальн. коммерч., научное | до 10-8D |
12 | статика, мировая сеть | фазовая, двухчастот. | - | непре-рывно | точные или вычисля-ются | Научное (Bernese, GAMIT, GIPSY) | до 1 см в геоцентрич. координатах |
Примечания:
1) широкозонный дифференциальный метод.
2) фазовая статика без разрешения целочисленной неоднозначности фазы.
Точность дифференциального и относительного метода значительно выше, чем в соответствующих вариантах абсолютного метода и может достигать сантиметрового и даже более высокого уровня. Однако следует обратить внимание на два момента. Во-первых, поскольку в этих методах координаты неизвестных пунктов находятся относительно опорного пункта, то погрешности его координат полностью войдут в координаты определяемых пунктов. Кроме того, поскольку в относительном методе координаты опорного пункта используются для вычисления приращений координат, то его ошибки также будут влиять на точность определения компонент базовых линий.
В каждом из методов наблюдения возможны в режимах статики и кинематики. При статических наблюдениях приемник находится в стационарном положении относительно Земли, в то время как кинематика предполагает движение. Поэтому потеря захвата сигнала спутника для статического позиционирования не является настолько важной, как при кинематическом позиционировании. Статическое позиционирование позволяет накапливать данные, добиваясь повышения точности. Статическое относительное позиционирование по фазовым измерениям является наиболее точным методом определения и наиболее часто используется геодезистами. Преимуществом кинематического позиционирования является его возможность получать траекторию движения транспортного средства, на котором установлена спутниковая аппаратура. При относительном кинематическом позиционировании один из приемников является стационарным, а другой - движущимся. Оба приемника наблюдают одни и те же спутники, а при обработке может достигаться точность сантиметрового уровня.
Техника фазовых наблюдений значительно сложнее техники кодовых измерений. Влияет, в первую очередь, необходимость обеспечения непрерывности измерений фазы несущей. При наблюдениях кодовым приемником каждое измерение производится независимо от остальных. Потеря захвата какого-либо спутника, как правило, не влияет на полноту остальных данных. Поэтому, в принципе, можно ограничиться однократным фиксированием координат, если удовлетворяет их точность. При фазовых измерениях наблюдений одной эпохи недостаточно для определения целочисленных неоднозначностей фазовых отсчетов. Поэтому, чтобы набрать необходимый объем данных, наблюдения проводят достаточно длительное время.
9.2 АБСОЛЮТНЫЙ МЕТОД СПУТНИКОВЫХ ОПРЕДЕЛЕНИЙ
9.2.1 Определение координат по кодовым псевдодальностям
В абсолютном методе спутниковый приемник определяет свои координаты, скорость и время по спутникам СРНС независимо от других приемников (рис. 9.1).
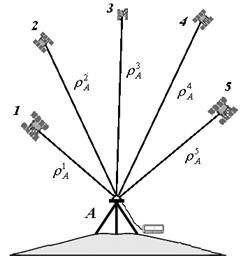
Рис. 9.1. Абсолютный метод спутниковых определений.
Основным параметром, по которому находятся координаты, является псевдодальность![]() , уравнение которой, полученное в разделе 8.1.2, приведем в виде:
, уравнение которой, полученное в разделе 8.1.2, приведем в виде:
![]() , (9.1)
, (9.1)
где индекс i относится к спутнику, i = 1, 2, …s, индекс А – к пункту наблюдений. В левой части уравнения приводится измеренная приемником псевдодальность. В правой части находятся: геометрическая дальность ![]() ,
, ![]() - время прохождения сигнала,
- время прохождения сигнала, ![]() и
и ![]() - сдвиги шкал часов (поправки часов) соответственно для приемника и для спутника,
- сдвиги шкал часов (поправки часов) соответственно для приемника и для спутника, ![]() и
и ![]() - ионосферная и тропосферная поправки, dA и di – задержки сигналов в аппаратуре приемника и спутника,
- ионосферная и тропосферная поправки, dA и di – задержки сигналов в аппаратуре приемника и спутника, ![]() - влияние многопутности на трассе распространения сигнала,
- влияние многопутности на трассе распространения сигнала, ![]() - случайные ошибки измерений (шумы), с – скорость распространения электромагнитной волны в вакууме.
- случайные ошибки измерений (шумы), с – скорость распространения электромагнитной волны в вакууме.
Практическое применение этого уравнения возможно, если в измеренную псевдодальность ввести все поддающиеся учету поправки. Поправки за влияние ионосферы и тропосферы вычисляются в соответствии с моделями, приведенными в главе 7. Модель поправки часов спутников GPS содержится в навигационном сообщении и выглядит следующим образом:
![]() , (9.2)
, (9.2)
где a0, a1, a2 – коэффициенты полинома, а toc – опорное время (время часов) для коэффициентов, а член Dtr учитывает релятивистские эффекты (см. раздел 7.4.6). В частности, a0 – сдвиг часов (поправка часов) для эпохи toc, a1 – скорость дрейфа часов (ход часов) в эпоху toc и a2 – половина ускорения часов в эпоху toc. Для спутников ГЛОНАСС в навигационном сообщении ход часов и скорость хода не приводятся.
Задержки сигнала в аппаратуре спутника и в приемнике определяются путем калибровок или вообще не учитываются, то есть входят в шумы измерений. То же самое происходит с многопутностью сигнала: ее влияние обычно неизвестно.
Геометрическая дальность выражается через радиусы-векторы спутника ri и станции RA в общеземной системе координат как модуль разности векторов:
![]() . (9.3)
. (9.3)
Координаты спутников ![]() вычисляются по навигационному сообщению на момент выхода сигнала
вычисляются по навигационному сообщению на момент выхода сигнала ![]() , где
, где ![]() . Для спутников GPS применяется аналитический метод вычислений, для спутников ГЛОНАСС – численное интегрирование (раздел 4.3). Из-за того, что векторы положений спутников
. Для спутников GPS применяется аналитический метод вычислений, для спутников ГЛОНАСС – численное интегрирование (раздел 4.3). Из-за того, что векторы положений спутников ![]() задаются в одной из общеземных систем (ПЗ-90, WGS-84), не являющихся инерциальными, их необходимо исправлять поправкой за поворот Земли за время прохождения сигнала
задаются в одной из общеземных систем (ПЗ-90, WGS-84), не являющихся инерциальными, их необходимо исправлять поправкой за поворот Земли за время прохождения сигнала ![]() :
:
 (9.4)
(9.4)
где wÅ - угловая скорость вращения Земли. Высота спутников СРНС около 20000 км, поэтому время прохождения сигнала не менее 66 мс. Земля поворачивается со скоростью 15²/с, поэтому угловое смещение Земли при вращении вокруг своей оси составит около 1². Если общеземные координаты применяются без поправки, то координаты определяемой станции будут смещены примерно на 1² по долготе [Teunissen et al. 1998].
Воспользуемся линеаризованным представлением геометрической дальности (раздел 8.1.7), считая, что координаты спутников известны, а в приближенное положение пункта ![]() требуется отыскать вектор поправок
требуется отыскать вектор поправок  :
:
![]() , (9.5)
, (9.5)
где ![]() - приближенное значение геометрической дальности,
- приближенное значение геометрической дальности,
![]() , (9.6)
, (9.6)
а вектор ![]() является единичным вектором топоцентрического направления на спутник:
является единичным вектором топоцентрического направления на спутник:
 (9.7)
(9.7)
Если предположить, что поправка часов спутника dti в процессе измерений адекватно представляется моделью (9.2), то в уравнении (9.1) оказывается четыре неизвестных: три координаты станции XA, YA, ZA и поправка часов приемника dtA. Тогда переходим к уравнению поправок
![]() (9.8)
(9.8)
или
![]() , (9.9)
, (9.9)
где ![]() - свободный член,
- свободный член,
![]() , (9.10)
, (9.10)
а в невязку ![]() вошли шумы измерений, ошибки координат спутника и все остальные немоделируемые ошибки из-за атмосферной рефракции, многопутности и т. п.
вошли шумы измерений, ошибки координат спутника и все остальные немоделируемые ошибки из-за атмосферной рефракции, многопутности и т. п.
Для определения четырех неизвестных уравнения (9.9) необходимо, чтобы число наблюдений равнялось или было больше, чем число неизвестных. Это условие достаточное, но оно не обязательно дает решение. Причина этого состоит в том, что матрица нормальных уравнений может оказаться плохо обусловленной, что приводит к известному положению, называемому дефицитом ранга.
Если число измерений в каждую эпоху одинаковое, то полное число наблюдений n = s×E, где через s обозначено число спутников, а через E – число эпох.
При статическом позиционировании неизвестными являются три координаты пункта наблюдений и поправка часов приемника для каждой эпохи наблюдений. Таким образом, число неизвестных равно 3+E. Основная конфигурация определяется как
s×E > 3 + E, (9.11)
откуда получаем явное соотношение
![]() . (9.12)
. (9.12)
Минимальное число спутников для получения решения равно s = 2, что приводит к числу эпох наблюдений E > 3. Для s = 4 решение получается при E > 1. Это решение отражает возможность мгновенного позиционирования GPS, где четыре неизвестных в любую эпоху находятся, если можно наблюдать, по крайней мере, четыре спутника.
Для кинематического точечного позиционирования основная конфигурация может быть непосредственно выведена из следующего рассмотрения. Из-за движения приемника число неизвестных координат станций равно 3E. Добавляя E неизвестных поправок часов приемника, получаем, что полное число неизвестных равно 4E. Следовательно, основное требование также определяется уравнением (9.11)
s×E > 4E, (9.13)
что дает s > 4. Иными словами, положение (и скорость) движущегося приемника можно определить в любой момент, когда наблюдаются, по крайней мере, четыре спутника. Геометрически решение представляется как пересечение четырех псевдодальностей (раздел 2.5.5).
Решение при s= 2 и E > 3 для статического позиционирования, к примеру, означает, что теоретически достаточно наблюдений двух спутников в течение трех эпох. Однако на практике эта ситуация не дает приемлемый результат, или вычисления будут неудачными из-за плохо обусловленной системы уравнений наблюдений, если эпохи не будут отстоять на большие промежутки (например, десятки минут). Решение также будет возможно, если сделаны наблюдения в три эпохи для двух спутников, а за ними сделаны три дополнительные эпохи, но для другой пары спутников. Такое применение будет редким, но его можно представить при некоторых обстоятельствах (например, в районе города) [Hofmann-Wellenhof et al. 2001].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
