
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2.3 МЕТОДЫ ИЗМЕРЕНИЙ В КОСМИЧЕСКОЙ ГЕОДЕЗИИ И ГЕОДЕЗИЧЕСКИЕ СИСТЕМЫ
В идеальном случае, для определения вектора положения станции или вектора базовой линии между парой станций необходимо измерить и длину, и направление вектора. Однако нет ни одной измерительной системы, которая могла бы обеспечить эту информацию одновременно и с точностью, достаточной и для геодезических измерений, и для навигации. Методы космической геодезии, которые разработаны к настоящему времени, главным образом базируются на следующих технологиях (рис. 2.2):
- измерение направлений на спутники специальными телескопами (фотографическими и телевизионными камерами), которые получают изображения спутника на фоне звезд;
- измерение расстояний от наземной станции до отдельного спутника, как в случае микроволновых систем (кодовые измерения в GPS, ГЛОНАСС, система PRARE), систем лазерной локации спутников (ЛЛС) и лазерной локации Луны (ЛЛЛ);
- совсем недавно появились системы одновременного измерения расстояний от спутника до нескольких станций (система PRARE);
- измерение разностей расстояний производится в радио интерферометрии со сверх длинными базами (РСДБ), доплеровских системах TRANSIT и Цикада (а также в орбитографической системе DORIS), и в относительном (или дифференциальном) методе GPS (по фазовым измерениям).
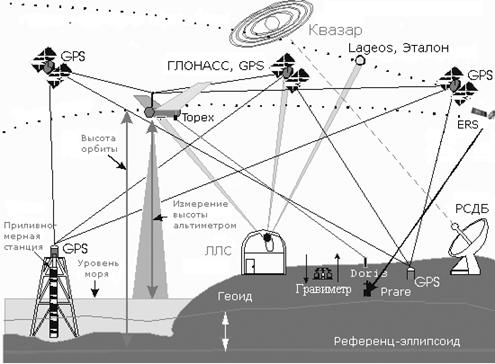
Рис. 2.2. Методы измерений в современной космической геодезии [http://www.ga.gov.au/nmd/geodesy/slr/whatis.htm#].
Измерение направлений на спутники по фотографиям широко применялось в космической геодезии в е годы, что позволило построить ряд сетей спутниковой триангуляции и векторных ходов. Недостаток этого метода – невысокая точность измерения направлений, ограниченная турбулентностью атмосферы (дрожание звездных изображений), неустойчивостью инструмента, низкими измерительными свойствами фотографических материалов и рядом других источников погрешностей. В лучшем случае в направлениях достигалась точность секундного уровня, что при расстояниях до спутников в 1000 км эквивалентно погрешности около 5 м.
2.3.1 Радио интерферометрия со сверхдлинными базами
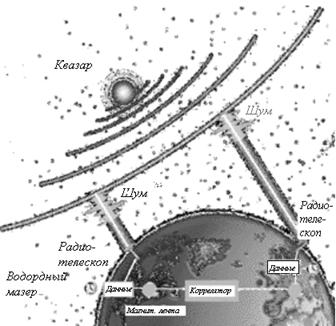
РСДБ – объединенная техника радио астрономии, атомных стандартов частоты, космической радиосвязи, ионосферных наблюдений, записи данных с высокой плотностью и высокоскоростной обработки данных. РСДБ наблюдает удаленные внегалактические радиоисточники - квазары и радиогалактики, используя радиотелескопы с независимыми стандартами времени и частоты - высокостабильными водородными мазерами. Шумовые сигналы от радиоисточника записываются на магнитные ленты. Специальные устройства - корреляторы - обрабатывают эти записи для того, чтобы извлечь информацию о разности времени между приходом волны на антенны РСДБ комплекса. Полученная информация, записанная уже в цифровом виде, используется астрономами и геодезистами для изучения различных физических процессов [Burša, Kostelecký 1999].
На рис. 2.3а показан принцип работы простейшего радиоинтерферометра из двух антенн. РСДБ является геометрическим методом: здесь измеряется разность моментов прибытия радиоволны от удаленного квазара на две расположенные на Земле антенны. Используя большое число измерений временных разностей от многих квазаров, наблюдаемых глобальной сетью наземных радиотелескопов, в методе РСДБ определяют инерциальную систему отсчета, задаваемую квазарами и одновременно находит точные положения антенн. Поскольку измерения времени производятся с точностью до нескольких пикосекунд, то взаимные положения антенн определяют с точностью до нескольких миллиметров, а положения квазаров – до долей миллисекунды дуги. Поэтому, как правило, в работе сети РСДБ участвуют 4-6 радиотелескопов, а иногда и больше. Техника РСДБ помогает решать различные проблемы астрометрии, геодезии и геодинамики. Точные координаты РСДБ антенн задают Международную земную систему координат (ITRF). Точные координаты квазаров задают Международную небесную систему отсчета (ICRF). Эти две системы отсчета связаны между собой с помощью пяти параметров вращения Земли (EOP) - поправки к двум углам нутации, поправки к координатам полюса и разность UT1-UTC. РСДБ позволяет оценивать все указанные величины, являясь, таким образом, универсальным средством как для построения обеих систем координат, так и для установления связи между ними [http://astro. *****/rus-win/staff/titov/VLBI. html, http://www.nict.go.jp/ka/radioastro/vlbi.html].

а б
Рис. 2.3. (а) Принцип работы РСДБ. (б) Антенна РСДБ Центра космических исследований в Кашима (Япония). Диаметр антенны 34 м [http://www2.crl. go. jp/ka/radioastro/index. html]
2.3.2 Лазерная локация спутников и Луны
Лазерная локация спутников – это измерение точных расстояний между лазерным телескопом (дальномером) и отражателями на поверхности пролетающего спутника. Локация производится подачей очень коротких вспышек лазерного излучения (10-150 пс). Зондирующий импульс запускает счетчик интервалов времени. Отраженный импульс регистрируется высокочувствительным детектором (отраженный импульс очень слабый, иногда даже может содержать всего один фотон). Вернувшийся сигнал останавливает счетчик, и записывается время прохождения луча Dt. Поскольку скорость распространения света известна, то можно вычислить пройденное светом расстояние:
D = c ×Dt /2.
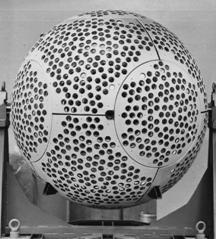
В измеренное расстояние вводятся поправки за влияние атмосферы, за калибровку и за несовпадение отражателей с центром масс спутника. Скорость света не является постоянной при прохождении луча через атмосферу и это вносит наибольшую ошибку в измерения. Тем не менее, эта погрешность для волн оптического диапазона значительно меньше, чем для волн радиодиапазона. Лучшие современные стационарные лазерные дальномерные системы (рис. 2.4а) обеспечивают среднюю квадратическую погрешность одного выстрела около 10 мм, а для нормального места - 2 – 3 мм. Эти характеристики относятся к спутникам, удаленным примерно на 6000 км (Lageos, Эталон, рис. 2.4б). Этот уровень точности невозможно выдерживать для более далеких спутников из-за слабого сигнала, а для более близких спутников – из-за локальных гравитационных воздействий. Наиболее существенным недостатком метода лазерной локации спутников является его зависимость от погоды, поскольку для оптического диапазона электромагнитного излучения облачный покров является непреодолимым препятствием.

а б
Рис. .2.4. (а) Лазерный дальномер Потсдам-2 GeoForschungsZentrum Potsdam (GFZ).
(б) Спутник для лазерной локации Эталон (СССР). Масса 1415 кг, диаметр 129.4 см, на поверхности 2000 уголковых отражателей.
Для лазерной локации Луны используются уголковые рефлекторы, расположенные на советских космических аппаратах Луноход-1 и Луноход-2, а также доставленные во время лунных экспедиций американских кораблей Аполлон-11, -14 и -15 [Burša, Kostelecký 1999].
Области применения лазерной дальнометрии:
- космическая геодезия (исследования гравитационного поля Земли, определение параметров вращения Земли, уточнение общеземных координатных систем),
- определение точных орбит,
- слежение за спутниками,
- навигация, передача точного времени,
- геофизические исследования (исследования атмосферы, океана и т. п.).
2.3.3 Российский космический геодезический комплекс «Гео-ИК»
С 1981 г. в СССР (позднее в России) производятся регулярные запуски космических аппаратов типа «Гео-ИК» (другое название «Муссон», рис. 2.5). Эти спутники, созданные НПО прикладной механики (г. Красноярск-26, ныне г. Железногорск), предназначались для формирования космического сегмента национальной геодезической системы 2-го поколения, выполняющей задачи точного определения координат различных точек земной поверхности, развития геодезических сетей, уточнения формы и координат центра масс Земли, решения целого комплекса оборонных, народнохозяйственных и научных координатометрических задач. За годы эксплуатации КА типа «Гео-ИК» позволили накопить большой объем уникальной измерительной информации, без которой были бы невозможны полноценное и эффективное использование, координатная привязка любых снимков поверхности Земли, составление новых земных карт, работа навигационных служб.
На борту спутников «Гео-ИК» установлена доплеровская система измерения радиальной составляющей скорости, ретранслятор системы измерения наклонной дальности, оптические уголковые отражатели для наземной лазерной аппаратуры измерения дальности и система световой сигнализации, позволяющая производить серии вспышек, фотографируемых наземными фотоастрономическими установками на фоне звездного неба. На КА «Муссон» № 24 вместо системы световой сигнализации был установлен радиотехнический комплекс «Элекон», предназначенный для навигационного сопровождения ценных грузов.
Уточнение гравитационного поля Земли осуществляется по данным высокоточного радиовысотомера, который производит измерения и предварительную обработку результатов измерений высот от поверхности Мирового Океана с последующей передачей на Землю. В дальнейшем спутниковая альтиметрия обрабатывается совместно с результатами наземной гравиметрической съемки.
Одновременно с измерениями, с помощью бортовых запоминающих устройств осуществляется доставка на наземные астрономо-геодезические пункты программ работы с космическим геодезическим комплексом (программы наблюдений). [Глушков и др. 2002; http://www.plesetzk.narod.ru].
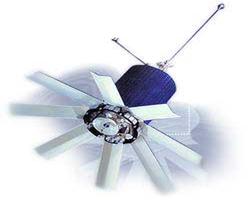
Рис. 2.5. Спутник «Гео-ИК» (масса 1610 кг, длина 5.84 м, диаметр 2.36 м, наклонение орбиты 73.6° или 82.6°, высота полета 1500 км, период обращения 116 мин. [http://www. *****/produkt/satelites/geo-ik. htm]).
2.3.4 Спутниковая геодезическая система DORIS
Название DORIS расшифровывается как Doppler Orbitography and Radiopositioning Integrated by Satellite (определение орбит и положений по доплеровским спутниковым измерениям). Система разработана во Франции. В этой системе измеряется скорость изменения расстояний до спутника по сигналам от плотной сети наземных радиомаяков. Полученные данные обрабатываются на земле, обеспечивая сантиметровую точность определения орбит. Также эти данные обрабатываются на борту, давая в реальном времени точность положений спутников в несколько дециметров. В системе используются альтиметрические спутники TOPEX/POSEIDON, Jason-1 и ENVISAT и спутники для дистанционного зондирования SPOT-2, SPOT-3, SPOT-4 и SPOT-5 (рис. 2.6). В дополнение к возможности определения орбит данные используются для
- изучения динамики solid Земли,
- мониторинга ледников, оползней и вулканов,
- улучшения моделирования гравитационного поля Земли и ионосферы.
Система DORIS была запроектирована для выполнения очень точного определения параметров орбит спутников, вращающихся на низких орбитах, в поддержку эксперимента по океанической альтиметрии Poseidon. Предполагалось обеспечить высоту опорных орбиты для обработки данных радарной альтиметрии с точностью около 10 см и менее.
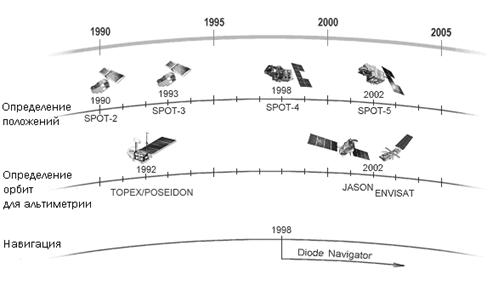
Рис. 2.6. Спутники и задачи системы DORIS.
В основе системы DORIS заложено точное измерение доплеровского сдвига радиочастоты сигналов, передаваемых наземными маяками (рис. 2.7) и принимаемых на борту космического аппарата. Измерения производятся на двух частотах: 2.03625 ГГц для измерения доплеровского сдвига и 401.25 МГц для ионосферной коррекции задержки распространения. Частота 401.25 МГц также используется для отметок времени измерений и передачи вспомогательных данных. Выбор системы передачи только на спутник позволяет полностью автоматизировать операции маяков и легкие линии связи по централизованной доставке данных в центр обработки.

Рис. 2.7. Спутниковая антенна DORIS (слева) и наземный радиомаяк.
Система DORIS включает бортовое оборудование, сеть маяков (рис. 2.8), оборудованных автономными источниками питания, и Центр контроля и обработки данных в Тулузе (Франция). Размещение пунктов сети и их поддержка выполняется Национальным географическим институтом Франции (IGN). Временное обеспечение системы реализуется через главные маяки, расположенные в Тулузе и в Куру (Французская Гвиана), которые связаны с атомными часами.
Рис. 2.8. Глобальная сеть системы DORIS.
Доплеровский сдвиг частоты измеряется на борту спутника каждые 10 секунд. Полученная радиальная скорость (ее точность около 0.4 мм/с) используется на земле в комбинации с динамической моделью траектории спутника для точного определения орбиты с ошибкой по высоте не более 5 см. Эти данные становятся доступными через 1.5 месяца из-за запаздывания внешних данных, например, таких как солнечное излучение. Доплеровские измерения также обрабатываются на борту для получения в реальном времени параметров орбиты с меньшей точностью.
Каждый маяк состоит из двух передатчиков с частотой 2036.25 МГц и 401.25 МГц, сверх стабильного генератора, микропроцессора, выполняющего функции контроля и управления, передачу времени, а также диагностику неисправностей, антенны и трех метеорологических сенсоров (атмосферного давления, температуры и влажности), необходимых для определения тропосферных задержек. Сигнал маяка содержит идентификатор, метеорологические данные и информацию о состоянии прибора. Сообщение имеет длину 0.8 с и повторяется каждые 10 с.
Подробную информацию о системе DORIS можно найти в Интернете на сайте Международной службы DORIS (IDS) http://ids. cls. fr/html/site_map. html.
2.3.5 Система PRARE
Система PRARE была разработана в Германии в 1982 г. как ответ на просьбу Европейского космического агентства по использованию новой серии спутников для дистанционного зондирования Земли, начавшейся с запуска ERS-1. Название PRARE является акронимом от Precise Range And Range-Rate Equipment – аппаратура для точного измерения расстояний и скорости изменения расстояний. Это компактная космическая запросная двухчастотная микроволновая система слежения. Система участвует в обычных бортовых операциях, начиная со спутника ERS-2, запущенного в мае 1995 г. С помощью глобальной сети мобильных, автономно работающих наземных станций система выполняет синхронные измерения наклонных дальностей по кодам и скорости изменения расстояний (т. е. относительную скорость) по фазовому смещению соответственно на уровне субдециметра и мм/с.
Рис. 2.9. Глобальная сеть станций системы PRARE на карте границ тектонических плит.
Космический сегмент PRARE, включающий наземные средства тестирования (ground test facilities, EGSE) полностью разработан и изготовлен в Германии. После интенсивной проверки на Земле спутниковая часть системы с января 1994 по октябрь 1995 г. функционировала на борту российского метеорологического спутника Метеор-3. С апреля 1995 г. система работает на спутниках серии ERS-2 (рис. 2.10). Ежесуточно выполняется около 50000 измерений, которые характеризуются точностью от 2.5 до 6.5 см по расстоянию и 0.1 мм/2 по скорости изменения расстояния.
Кроме сети наземных станций (рис. 2.9) и космического сегмента третьим компонентом PRARE является система контрольного сегмента. Она включает Главную станцию управления, станцию контроля времени и системных команд и станцию калибровки. Все станции располагаются в Германии (соответственно в Оберпфаффенхофене, Штутгарте и Потсдаме). Эти станции имеют возможности оценивать данные, контролировать работу системы и линии связи как на спутниках ERS-2, так и у наземных станций через линии связи микроволнового диапазона. Это делает системы независимой от несущего ее спутника.
Рис. 2.10. Спутник для дистанционного зондирования ERS-2 (высота полета 780 км, наклонение 98.5°, масса 2300 кг) [http://www.op.gfz-potsdam.de/prare/general/general.html].
Высококачественные измерения PRARE, хорошая повторяемость измерений в глобальном масштабе, плотность и пространственное распределение пунктов позволяют использовать их для геодинамических исследований, в том числе таких как:
- точное определение орбит,
- определение координат и скоростей станций,
- определение параметров вращения Земли и гравитационного поля Земли,
- определение параметров ионосферы,
- информация о точном времени.
2.4 ТЕХНОЛОГИИ МИКРОВОЛНОВЫХ ИЗМЕРЕНИЙ
Из приведенных выше описаний методов современной космической геодезии рассмотрим только технологии микроволновых измерений, поскольку
- они не подвержены влиянию облаков и дождя и других погодных факторов и могут действовать и днем, и ночью,
- их можно применять на самих спутниках,
- они подобны легко понимаемым обычным технологиям наземных геодезических измерений и навигации, таким как дальномерные и разностно-дальномерные системы,
- используемая аппаратура достаточно мобильная, а результаты измерений доступны для автоматизированной обработки, вследствие чего достигается их высокая оперативность.
В дальнейшем будем различать двунаправленный (запросный) и однонаправленный (беззапросный) способы измерений, и затем рассмотрим краткое введение в способы измерений, основанные на дальномерных и разностно-дальномерных способах.
2.4.1 Двунаправленный и однонаправленный способы измерения расстояний
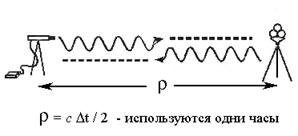
Измерение расстояний по микроволновым сигналам можно сделать любым из двух методов. Двунаправленное (запросное) измерение расстояний включает измерение времени прохождения сигнала по одним часам (рис. 2.10а). На одном конце линии специальный прибор (стеклянная призма или микроволновый приемоответчик) отражает пришедший сигнал обратно к передатчику. Основным измерением является время прохождения сигнала прямо и обратно. Эта методика используется в некоторых видах электронных дальномеров. Ее большим недостатком является то, что она наилучшим образом подходит для систем с одним пользователем (объединение отражателя с передатчиком, необходимое для одного измерения, становится негибким при многих пользователях).
На измерении времени прохождения сигнала работают также спутниковые альтиметрические системы, широко применяемые в исследованиях мирового океана. По сигналам установленного на борту спутника (Топекс-Посейдон, ERS-1, -2 и др.) микроволнового передатчика измеряется расстояние до морской поверхности с точностью до нескольких сантиметров.
а б
Рис. 2.10. Двунаправленное (а) и однонаправленное (б) измерение расстояний.
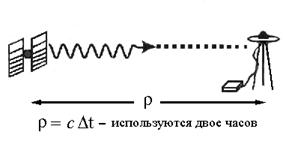
Метод однонаправленного (беззапросного) измерения расстояний (рис. 2.10б) заключается в измерении времени прохождения сигналов через использование различных часов. Часы передатчика генерируют сигнал, а часы приемника определяют, когда этот сигнал прибыл. Разность между временем передачи и приема равна времени прохождения, поэтому каждые часы должны поддерживать одно и то же время. (Ошибка в синхронизации двух часов в одну наносекунду равна 30 см в расстоянии.) В общем, каждые часы должны хранить свое собственное время, а соотношение между часами можно установить по самим измерениям. Главное преимущество такой системы заключается в том, что она «многопользовательская», каждый пользователь является пассивным «слушателем».
2.4.2 Измерение расстояний и разностей расстояний
Измерение расстояния можно сделать с очень высокой точностью, поскольку оно, в основном, включает измерение временной задержки, т. е. времени прохождения сигнала. Современные часы представляют собой высокочастотные генераторы (см. раздел 6.2), основанные либо на кристалле кварца, либо на атомных часах какого-либо вида. Хотя каждые часы показываются различные характеристики стабильности (одни из них лучше для измерения длинных интервалов, другие – для коротких интервалов), их общая стабильность имеет порядок одной части на 1010 – 1012 частей от измеряемого временного интервала (табл. 6.3). Расстояние можно найти, умножив временную задержку на скорость распространения света (с = м/с в вакууме). Временная задержка, измеренная с такой точностью по одним часам, вносит в расстояние ошибку в сантиметр и даже меньше. Использование двух часов в однонаправленном (беззапросном) методе усложняет существо проблемы по ряду причин:
1. Измерение временной задержки зависит не только от качества часов, но и от того, насколько хорошо они «синхронизированы». На это влияют такие факторы как
- время, прошедшее от последней синхронизации (из-за ухода часов с момента последней синхронизации),
- насколько хорошо выполняется сама синхронизация на первом пункте (редко бывает возможным расположить часы физически рядом и сравнить их),
- главное, что обычно сравнение выполняется с третьей временной шкалой, доступной всем часам (включая те, что на орбите), и, следовательно, от качества определения и поддержания этих «главных» часов системы.
2. Информация «о передаче времени» должна быть доступна вторым часам, а следовательно, и разрешающая способность, с которой эта информация доступна, должна быть адекватна (например, если цифровой сигнал времени определяется частотой 10 МГц, то разрешающая способность времени равна 0.1 микросекунды или 30 м в расстоянии.
Первый из факторов может быть преодолен посредством соответствующего моделирования смещенных дальностей (раздел 8.1.2). Второй фактор важен для измерений мгновенных дальностей в GPS (по кодам), но не для измерений дальностей, выведенных по измерениям фазы несущей.
Альтернативное решение для обеих этих проблем – образование разностей дальностей. Это полезно для измерений, которые содержат ошибки времени (и другие ошибки), являющиеся линейно коррелированными, например, если одинаковые смещения воздействуют на два измерения, то при их вычитании общие смещения будут исключаться. В случае конфигурации один спутник – одна станция такой подход нацелен на редуцирование измерений до их простейшей формы, измерения кратковременной задержки, что проще, чем измерение однонаправленной дальности (со всеми сопровождающими ее проблемами синхронизации и т. п.) между спутником и станцией, поэтому изменение во времени прохождения (или дальности) является очень важным. Отсюда следует, что точное время передачи не обязательно, так как измерение разности расстояний зависит только от кратковременных членов стабильности и у часов станции, и у часов спутника.
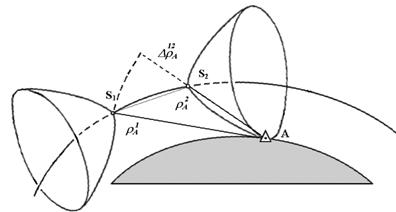
Разности расстояний между эпохами являются основой для спутниковых измерений в доплеровской американской системе ТРАНЗИТ и советской системе «Цикада» (рис. 2.11). Разности расстояний Dr12, Dr23, Dr34 свободны от доплеровского сдвига частоты. В результате движения спутников частота сигналов спутников непрерывно изменяется. Сдвиги в частоте при интегрировании на заданном интервале времени функционально связаны с изменениями в радиальном расстоянии (или в наклонной дальности). По разностям дальностей может быть определено положение приемника из измерений одного спутника доплеровской системы.
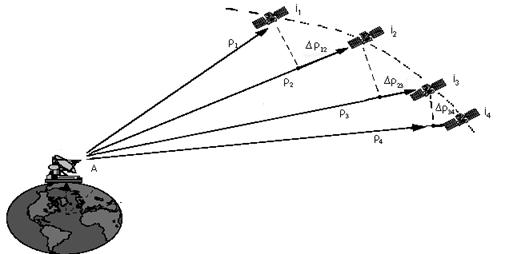
Рис. 2.11. Определение разностей дальностей между эпохами.
2.5 ФУНКЦИОНАЛЬНЫЕ МОДЕЛИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
При рассмотрении соответствующих методов определения положения для описанных выше измерений необходимо делать некоторые предположения, а именно:
- координаты спутниковые доступны с точностью, соответствующей точности измерений, и
- измерения не «смещены» каким-либо образом, т. е. не содержат систематических погрешностей, возникающих из-за влияния различных факторов.
2.5.1 Позиционирование по дальностям до спутников
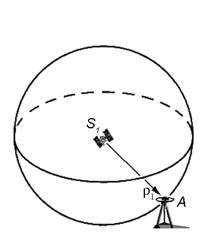
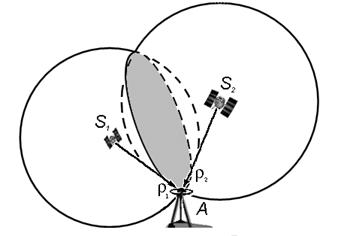
Основная концепция позиционирования с использованием дальностей выглядит одинаково и по наземным, и по спутниковым измерениям. При трехмерных измерениях дальность до известной точки ограничивает ее положение в пространстве поверхностью сферы, имеющей центр в известной точке S1 (рис 2.12-а) . В данном случае сфера называется поверхностью положения, а измеряемое расстояние называется навигационным параметром.
а б
Рис. 2.12. (а) Поверхность положения в виде сферы с радиусом, равным измеренному до спутника расстоянию. (б) Пересечение двух сфер.
Пересечение двух таких поверхностей положения дает окружность (рис. 2.12-б). Добавленная третья сфера пересекается с этой окружностью в двух точках (рис. 2.13), из которых одна совпадает с действительным положением пункта А. Второе положение А’ обычно оказывается очень далеко от пункта наблюдений и без труда может быть отвергнуто, например, по приближенным координатам точки А или посредством дополнительных измерений.
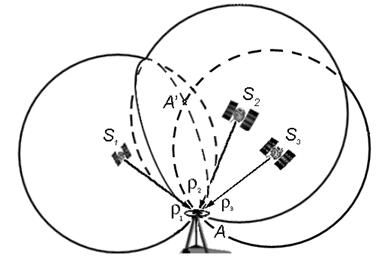
Рис. 2.13. Пересечение трех «поверхностей положения», основанное на наблюдениях дальностей.
Таким образом, чтобы определить положение пункта, необходимо иметь три дальности до трех известных точек. При определении координат наземного пункта в качестве таких точек могут быть навигационные спутники или псевдоспутники (радиомаяки, расположенные в точках с известными координатами и передающие такие же сигналы, как и сигналы реальных спутников). Метод может быть использован и для определения координат спутника по наблюдениям с наземных пунктов, имеющих точные координаты. В итоге появляется возможность по наблюдениям с известных наземных пунктов определять координаты спутников (решается прямая задача космической геодезии), а затем со спутников передавать их на неизвестных наземный пункт, наблюдения на котором производятся одновременно с остальными пунктами (обратная задача космической геодезии). Такой метод построения сетей был реализован в 60-е годы прошлого столетия в американской геодезической радиодальномерной запросной системе SECOR [Меллер 1967].
При двумерном позиционировании, например, как в случае плановых геодезических сетей или при навигации на море (предполагается, что положение находится на поверхности эллипсоида или на известной высоте над ним), пересечение поверхности положения и эллипсоида является «линией положения», и аппроксимируется кругом. Пересечение двух расстояний определяет местоположение точки, от которой были сделаны измерения расстояний. В геодезии это известно просто как линейная засечка. Построение геодезической сети по измерениям расстояний называют трилатерацией. Радионавигационную систему, работающую по такому принципу, называют time-of-arrival (TOA) system, т. е. системой, работающей по времени прибытия. К таким системам относятся также системы GPS и ГЛОНАСС.
Если точка является стационарной, то необходимо одновременно измерить два (или три) расстояния. Однако если точка движется, то все расстояния должны быть измерены одновременно, или через интервал времени, в течение которого точка не перемещается на величину, большую, чем точность (неопределенность) фиксирования. Позиционирование по спутниковым дальностям является основой применения GPS для большинства навигационных применений.
Уравнение, связывающее дальности ![]() , измеренные от пункта A до спутника с номером i, с координатами приемника XA, YA, ZA и координатами спутника Xi, Yi, Zi, имеет вид:
, измеренные от пункта A до спутника с номером i, с координатами приемника XA, YA, ZA и координатами спутника Xi, Yi, Zi, имеет вид:
![]() . (2.7)
. (2.7)
Задача определения координат пункта А решается при наблюдении не менее трех спутников, то-есть при i = 1, 2, 3, и наоборот, для определения координат спутника i необходимо провести одновременные измерения расстояний не менее чем с трех пунктов, то-есть при А = 1, 2, 3.
Чтобы измерить время прохождения сигнала, необходимо, чтобы часы всех передатчиков и приемника были синхронизированы. При скорости сигнал около 300000 ка/с ошибка измерений времени в 1 нс будет соответствовать ошибке в 0.3 м. Часы передатчиков можно синхронизировать между собой, зная расстояния между ними. Однако, это невозможно произвести с часами приемника из-за требования низкой цены приемника, если система планируется для массового использования. В системах GPS и ГЛОНАСС требования к часам приемников снижены за счет некоторого увеличения вычислений, что оправдано при существующей микропроцессорной технике. Но в ранних навигационных системах это рассматривалось как их недостаток.
2.5.2 Позиционирование по разностям дальностей
В некоторых системах измеряются разности прихода сигналов от двух передающих станций. Часы передатчиков синхронизированы, а часы приемника, который должен измерять разность моментов прибытия сигналов, составляющую обычно несколько миллисекунд, точно синхронизировать нет необходимости. Разность моментов преобразуется в разность расстояний. Радио навигационные системы, работающие по этому принципу, называются time-difference-of-arrival (TDOA) system, т. е. системы, работающие по разности моментов прибытия сигнала.
Как и при измерении дальностей, концепция позиционирования по разностям дальностей (или скорости изменения дальностей) является одинаковой как в наземных, так и в спутниковых измерениях.
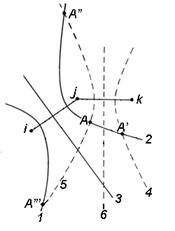
На рис. 2.14-а приведена схема плоского позиционирования по разностям моментов прибытия. Наблюдатель, находящийся в точке А, измеряет разность расстояний до станций i и j. Геометрическим местом точек, имеющих одну и ту же разность расстояний от пары неподвижных точек, является гипербола, состоящая из двух ветвей, то-есть в данном случае гипербола является линией положения. Точка A может оказаться и на линии 1, и на линии 2, симметрично расположенных относительно оси 3, причем по обе стороны относительно отрезка ij. Измерив одновременно разность расстояний от пары других станций, например, j и k, получают другие линии положения, изображенные пунктиром, в данном случае 4 и 5, симметрично расположенных относительно оси 6. Наблюдатель находится в точке пересечения двух гипербол, поэтому такой метод определения называют гиперболической засечкой или гиперболическим позиционированием. Минимальное количество опорных станций равно трем. Получающаяся неоднозначность решения (дополнительные точки A¢, A² и A²¢) из-за множества пересечений линий положения разрешается либо по априорным значениям координат наблюдателя, либо с помощью дополнительных измерений.
а б
Рис. 2.14. Гиперболы и гиперболоиды.
Координаты пользователя в положении A можно найти из решения системы нелинейных уравнений, соответствующих линиям положения:
 (2.8)
(2.8)
где Dr – разности дальностей.
Этот принцип лежит в основе функционирования систем радио навигации типа LORAN-C, «Чайка», работающих по разности расстояний.
В трехмерном пространстве разность дальностей до двух известных точек, ограничивает точку поверхностью положения, являющуюся одной из половин двуполостного гиперболоида вращения (рис. 2.14-б). При позиционировании по спутнику фокусами этого гиперболоида являются его центры масс в моменты, между которыми производилось измерение. Расстояние между положениями спутника образует базу измерительной системы, а разность дальностей является навигационным параметром. Если пункт одинаково удален от обоих положений спутника, то гиперболоид вырождается в плоскость. Если расстояния от положений спутника до наблюдателя велики по сравнению с базой, то гиперболоид вращения будет совпадает со своей асимптотой – конусом, вершина которого совпадает с серединой базы. Положение наблюдателя А определяется как пересечение не менее чем трех гиперболоидов. Каждая разность дальностей включает две известных точки, и поскольку одна из точек может быть общей для другой пары станций, то для определения положения требуется минимум четыре известных точки:
 (2.9)
(2.9)
На подобном принципе действуют доплеровские системы NNSS (TRANSIT), и «Цикада» («Надежда»), за исключением того, что две известных точки фактически создаются одним и тем же движущимся спутником. Поэтому разность расстояний включает один и тот же самый спутник и в меньшей степени зависит от нестабильности его генератора частоты.
Как и в случае позиционирования по расстояниям, если определяемый пункт не перемещается, то измерения не обязательно делать одновременно. Однако если точка перемещается, то необходимы одновременные измерения, если перемещение в интервале измерения значительны в сравнении с ошибками системы.
Системы GPS и ГЛОНАСС также можно использовать в этом доплеровском методе, но это редко делается для позиционирования в навигации или для геодезии.
2.5.3 Доплеровское позиционирование
Другой принцип позиционирования, используемый в радионавигации, основан на эффекте Доплера, при котором происходит изменение частоты сигнала, принятого наблюдателем, из-за относительного движения передатчика и приемника. Доплеровский сдвиг частоты определяется как разность между частотой принятого сигнала и частотой радио источника. Переданная и принятая частоты, fT и fR, связаны соотношением:
 , (2.10)
, (2.10)
где r – изменяющееся расстояние между передатчиком и приемником, ![]() - скорость изменения этого расстояния или лучевая скорость, vs – скорость распространения сигнала. Вместо термина «лучевая скорость» может применяться термин «радиальная скорость».
- скорость изменения этого расстояния или лучевая скорость, vs – скорость распространения сигнала. Вместо термина «лучевая скорость» может применяться термин «радиальная скорость».

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
