
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Член ![]() присутствует потому, что в (9.53) используется округление. Насколько мало
присутствует потому, что в (9.53) используется округление. Насколько мало ![]() , настолько будет мала невязка
, настолько будет мала невязка ![]() . Средняя невязка для всех наблюденных спутников на опорном пункте для эпохи 1 равна
. Средняя невязка для всех наблюденных спутников на опорном пункте для эпохи 1 равна
![]() , (9.56)
, (9.56)
где через s обозначено число спутников. Поправка к фазе несущей в эпоху 1 равна
![]() . (9.57)
. (9.57)
Изменение невязки от одной эпохи к следующей получается как
 (9.58)
(9.58)
Средняя невязка в эпоху t вычисляется по формуле
![]() , (9.59)
, (9.59)
а поправка к фазе для спутника i в эпоху t равна
![]() . (9.60)
. (9.60)
Вторая часть этого уравнения следует после подстановки (9.55) в формулу для фазовой дальности. Фазовая поправка (9.60) эпохи t передается на движущийся приемник MS, в котором измеренная фаза несущей исправляется как
![]() . (9.61)
. (9.61)
Чтобы получить соответствующее выражения для координат приемника MS, запишем вначале уравнение одинарной разности между приемниками BS и MS в виде
 (9.62)
(9.62)
Из уравнения (9.60) можно найти ![]() и подставить в (9.62). После преобразования получается:
и подставить в (9.62). После преобразования получается:
 (9.63)
(9.63)
Левая часть этого уравнения равна исправленной фазе несущей с обратным знаком ![]() . Вычитание уравнений (9.63) между двумя спутниками дает выражение, соответствующее наблюдению двойной разности как
. Вычитание уравнений (9.63) между двумя спутниками дает выражение, соответствующее наблюдению двойной разности как
 (9.64)
(9.64)
Теперь положение мобильной станции MS можно вычислить на самой станции, используя исправленные наблюдения ![]() , по крайней мере, до четырех спутников, образовав три уравнения вида (9.60). Это и есть решение по DGPS для фазы несущей. Оно отличается от обычного решения по двойным разностям из-за того, что вместо неоднозначностей двойных разностей
, по крайней мере, до четырех спутников, образовав три уравнения вида (9.60). Это и есть решение по DGPS для фазы несущей. Оно отличается от обычного решения по двойным разностям из-за того, что вместо неоднозначностей двойных разностей ![]() оценивается модифицированная неоднозначность
оценивается модифицированная неоднозначность
![]() . (9.65)
. (9.65)
Положение точки MS, вычисленное по (9.65), будет получено относительно базовой станции BS, поскольку координаты именно этой станции использовались для вычисления поправки к фазе несущей ![]() . Однако положение движущегося приемника можно определить и без явного знания положения опорной станции BS; достаточно знать поправки к фазе несущей. Пользователь на пункте MS должен использовать те же самые эфемериды и ту же самую методику вычислений, что и на станции BS, чтобы обеспечить согласованность в вычислениях топоцентрических расстояний
. Однако положение движущегося приемника можно определить и без явного знания положения опорной станции BS; достаточно знать поправки к фазе несущей. Пользователь на пункте MS должен использовать те же самые эфемериды и ту же самую методику вычислений, что и на станции BS, чтобы обеспечить согласованность в вычислениях топоцентрических расстояний ![]() и
и ![]() .
.
Одна из целей - получение малых значений для невязки ![]()
![]() и, следовательно, для средней невязки
и, следовательно, для средней невязки ![]() и для поправок к фазам несущей
и для поправок к фазам несущей  . Это выполняется через особый выбор
. Это выполняется через особый выбор ![]() в уравнении (9.53). Это свойство будет обеспечивать минимум телеметрической нагрузки. Телеметрическая нагрузка будет еще более снижена, если увеличить время между передачами поправок к фазе несущей. Например, если изменение в невязке от одной эпохи к следующей меньше, чем точность измерений у подвижного приемника, или если изменения в невязке слишком малы для того, чтобы ощутимо влиять на минимальную необходимую точность положения движущегося приемника, то можно усреднять поправки к фазе несущей и передавать их средние значения. Можно также передавать скорость изменения поправки
в уравнении (9.53). Это свойство будет обеспечивать минимум телеметрической нагрузки. Телеметрическая нагрузка будет еще более снижена, если увеличить время между передачами поправок к фазе несущей. Например, если изменение в невязке от одной эпохи к следующей меньше, чем точность измерений у подвижного приемника, или если изменения в невязке слишком малы для того, чтобы ощутимо влиять на минимальную необходимую точность положения движущегося приемника, то можно усреднять поправки к фазе несущей и передавать их средние значения. Можно также передавать скорость изменения поправки  . Если через t0 обозначить опорную эпоху, то пользователь может интерполировать поправки по времени как
. Если через t0 обозначить опорную эпоху, то пользователь может интерполировать поправки по времени как
![]() . (9.66)
. (9.66)
При разработке систем DGPS должны предприниматься предосторожности, чтобы убедиться, что такое простое моделирование фазовой поправки достаточно точно.
Один из способов уменьшения размера и скорости изменения невязки - использование наилучших доступных координат для фиксированного приемника и наилучших спутниковых эфемерид. Ошибки часов воздействуют на невязки непосредственно, как видно из уравнения (9.58). Ход часов и изменения в поправке часов приемника dtBS можно эффективно контролировать, подсоединив к приемнику опорной станции рубидиевый генератор. Изменение в поправке часов спутника dti из-за режима выборочной доступности являлось определяющим фактором, который ограничивал допустимое время для усреднения. После отмены режима SA это ограничение исчезло.
Описанный метод применим для фазы несущей как на L1, так и на L2.
9.3.5 WADGPS - дифференциальный метод GPS для широких зон
Поправки в фазы  и в дальности
и в дальности  представляют суммарный эффект от разных источников ошибок. Потребовалось бы большое число автономных систем DGPS, чтобы охватить области в масштабе континента. Альтернативой являются широкозонный дифференциальный метод GPS (Wide Area DGPS или WADGPS). Основная идея WADGPS – расширить пределы, до которых точные поправки остаются справедливыми, и, используя это, уменьшить число опорных станций так, чтобы охватывать целые районы земного шара.
представляют суммарный эффект от разных источников ошибок. Потребовалось бы большое число автономных систем DGPS, чтобы охватить области в масштабе континента. Альтернативой являются широкозонный дифференциальный метод GPS (Wide Area DGPS или WADGPS). Основная идея WADGPS – расширить пределы, до которых точные поправки остаются справедливыми, и, используя это, уменьшить число опорных станций так, чтобы охватывать целые районы земного шара.
Набор базовых станций размещается в нужном регионе, их измерения обрабатываются централизованно таким образом, что ошибки декомпозируются (разделяются) на их составляющие: от часов спутников, от эфемерид и от ионосферы. Поправки передаются для каждого источника ошибок раздельно через геостационарные спутники или по сети FM радиостанций так, чтобы каждый пользователь мог вводить поправки соответствующим образом в зависимости от своего географического положения. Поэтому говорят, что WADGPS передает векторы дифференциальных поправок, в противоположность скалярным поправкам в LDGPS, где все ошибки перемешаны вместе. Метод WADGPS требует расширения обычного формата (стандарта) RTCM-104.
В зависимости от предполагаемого применения есть много способов моделирования в проектируемых системах WADGPS. Большинство исследований, выполненных для цели расширения дифференциального метода GPS, связывают с точной навигацией. Хотя чаще всего используются псевдодальности, концепция WADGPS применима к расширению возможностей RTK – кинематических съемок в реальном времени, в которых фазы несущей являются обязательной частью решения.
Как известно, влияние ошибок координат опорных станций и эфемерид повышается с увеличением расстояния между приемниками. Поэтому положения всех опорных станций должны быть хорошо известны. Эфемериды, вычисляемые в реальном времени на главной станции, должны быть точнее, чем бортовые эфемериды. Точные эфемериды становятся частью сообщения в WADGPS. Из-за пространственного и временного ослабления корреляции ионосферных поправок было бы важно, чтобы они моделировались, оценивались и передавались пользователю. Чтобы иметь возможность следить за ионосферой, контрольные станции должны быть оборудованы двухчастотными приемниками. Использование внешней базы времени на основе рубидиевых стандартов частоты уменьшило бы ошибки часов приемника и дало возможность лучше оценивать часы спутников.
Коммерческие широкозонные службы DGPS уже действуют и широко используются в оффшорных зонах, сейсмических съемках и сельском хозяйстве. Одной из современных систем DGPS является система WAAS (Wide Area Augmentation System) Управления гражданской авиации (FAA). Что делает WAAS особой системой, так это бескомпромиссное требование обеспечения безопасности гражданской авиации. Двухчастотные измерения на L1, L2 примерно от 25 опорных станций WAAS, распределенные по континентальной части США, обрабатываются на Главной станции, чтобы оценить дифференциальные поправки и границы их ошибок. Дифференциальные поправки раскладываются на три компонента: быстро изменяющийся компонент от ошибок часов и два медленно изменяющихся компонента из-за ошибок эфемерид и задержек в ионосфере для набора точек, в соответствии с координатной сеткой из параллелей и меридианов.
Дифференциальные поправки кодируются в навигационное сообщение, передаваемое со скоростью 250 бит/с на частоте L1 от геостационарных спутников, передающих сигналы обратно на Землю, на их область охвата. У GPS приемника должна быть модифицированная программа, которая должна принимать дополнительный дальномерный сигнал и демодулировать навигационное сообщение с навигационными поправками. Сигналы WAAS доступны с 2000 г. и предлагаемая точность позиционирования составляет 1-2 м в плане. Предполагается, что система будет готова для гражданского использования в 2003 г.
Усиления GPS, подобные WAAS, разворачиваются в Европейских странах и Японии на районы, интересные для них. Эти системы называются для Европы – EGNOS (European Geostationary Navigation Overlay System) и для Японии – MSAS (Multifunction Transportation Satellite (MTSAT)-based Satellite Augmentation System). Общее название для таких систем - SBAS (Satellite-Based Augmentation System). Заключены международные соглашения, так что WAAS, EGNOS и MSAS вместе будут создавать глобальное обеспечение дифференциальными поправками.
Другая заслуживающая внимания широкозонная система DGPS, это глобальная DGPS (GDGPS) система Национального управления по аэронавтике (NASA), разработанная Лабораторией реактивного движения JPL, способная обеспечивать дециметровый уровень точности в глобальном масштабе с помощью двухчастотных приемников. Двухчастотные приемники, обычно используемые в низкоорбитальных проектах, научных применениях и высокоточной коммерческой деятельности имеют преимущество в исключении ионосферной задержки как источника ошибок. Поэтому система GDGPS фокусирует внимание на обеспечении точных в реальном времени оценок GPS эфемерид и параметров часов. Такие оценки могут быть получены из сравнительно редкой сети опорных пунктов, распределенных по земному шару. Другое новшество GDGPS – передача поправок через Интернет. Планировалось начать работу GDGPS в 2001 г. [Misra and Enge 2001; Blewitt et al. 2002; http://gipsy. jpl. nasa. gov/igdg/].
9.4 ОТНОСИТЕЛЬНОЕ ПОЗИЦИОНИРОВАНИЕ
Целью относительного позиционирования является определение координат неизвестной точки по отношению к известной точке, которая в большинстве применений является стационарной. Другими словами, относительное позиционирование нацелено на определение вектора между двумя точками, которые часто называют вектором базовой линии или просто базовой линией. Пусть А – опорная (известная) точка, В – неизвестная точка, а DAB – вектор базовой линии. Вводя соответствующие векторы положения RA, RB, можно составить соотношение
![]() RB=RA+DAB, (9.67)
RB=RA+DAB, (9.67)
а компоненты вектора базовой линии есть
 . (9.68)
. (9.68)
Координаты опорной точки должны даваться в системе WGS-84, для этого обычно используют решение по кодовым дальностям.
Относительное позиционирование может выполняться по кодовым или фазовым дальностям. В дальнейшем мы будем рассматривать только решения по фазам. Относительное позиционирование требует одновременных наблюдений и на опорной, и на неизвестной точках. Это значит, что метки времени наблюдений должны быть одинаковыми для этих двух точек. Предполагая, что такие одновременные наблюдения имеются на двух пунктах А и В на спутники i и j, можно образовать линейные комбинации, которые приводят к одинарным, двойным и тройным разностям (раздел 8.2). Большинство программ для постобработки использует эти три способа, поэтому в следующем разделе показаны их основные математические модели.
9.4.1 Статическое относительное позиционирование
В статической съемке отдельного вектора базовой линии между пунктами А и В два приемника должны оставаться стационарными в течение всего сеанса наблюдений. Исследуем одинарные, двойные и тройные разности в отношении числа уравнений наблюдений и неизвестных. Предполагается, что на двух пунктах А и В можно наблюдать одни и те же спутники i, j в одни и те же эпохи. Здесь не будем касаться практической проблемы блокирования сигналов спутников. Число эпох обозначим через E, а число спутников – через s.
Предположим, что уравнения измеренных фаз (в единицах расстояния) имеют вид:
 (9.69)
(9.69)
Это подразумевает, что параметры часов спутника, тропосферные и ионосферные задержки не определяются, а считаются известными или будут исключаться при обработке. Этот набор данных можно было бы решать для каждого пункта отдельно, что было бы эквивалентно точечному позиционированию.
Для каждого спутника и для каждой эпохи можно выразить одинарные разности. Поэтому число этих измерений равно Es. Число неизвестных записано под соответствующими членами уравнения одинарной разности:
 (9.70)
(9.70)
Число неизвестных поправок часов E-1 указывает на дефицит ранга в 1. Это означает, что один из неизвестных параметров можно (и нужно) выбирать произвольно. Предположим, что выбрана поправка часов приемника в одну эпоху, тогда вместо Е неизвестных поправок часов приемника остается только Е – 1 поправок часов. Из приведенного выше соотношения можно вывести, что
![]() . (9.71)
. (9.71)
Хотя это уравнение является эквивалентом уравнения (9.41), полезно повторить (теоретически) минимальные требования для решения. Единственный спутник не обеспечивает решение, потому что знаменатель в неравенстве (9.71) становится нулевым. С двумя спутниками получается результат Е > 4, а в нормальном случае из четырех спутников получается, что Е > 2.
Для двойных разностей соотношение между измерениями и неизвестными достигается с использованием той же самой логики. Заметим, что для одной двойной разности необходимо два спутника. Для s спутников получается s–1 двойных разностей в каждую эпоху, поэтому полное число двойных разностей равно E×(s–1). Число неизвестных записано под соответствующими членами уравнения двойной разности:
 (9.72)
(9.72)
Из приведенного выше соотношения следует, что
![]() , (9.73)
, (9.73)
что идентично уравнению (9.71), и поэтому основное условие наблюдений дается парой уравнений s = 2, E > 4 и s =4, E > 2. Чтобы избежать линейно зависимых уравнений при формировании двойных разностей, используется либо метод базового (опорного) спутника, либо метод последовательного спутника. Если наблюдались спутники i, j, k, l, m, то при выборе опорного спутника i образуются разности по парам ij, ik, il, im. В методе последовательного спутника образуются разности по парам ij, jk, kl, lm. Другие двойные разности являются линейными комбинациями, и, следовательно, линейно зависимы. Например, двойная разность между спутниками jk (в первом случае) может быть получена путем вычитания ij и ik, а разность ik (во втором случае) может быть образована путем вычитания ij и jk.
Модель тройных разностей включает только три неизвестных координаты точки. Для одной тройной разности необходимо две эпохи. Следовательно, в случае E эпох возможны E – 1 линейно независимых комбинаций эпох. Таким образом, число уравнений
![]()
 . (9.74)
. (9.74)
Из приведенного соотношения получается, что
![]() , (9.75)
, (9.75)
Это уравнение идентично уравнению (9.71) и, следовательно, основная конфигурация вновь дается парами уравнений s = 2, E > 4 и s =4, E> 2.
Таким образом, в относительном методе может использоваться любая математическая модель: одинарные, двойные и тройные разности.
9.4.2 Кинематическое относительное позиционирование
В кинематическом позиционировании приемник на известной точке А в начале базовой линии остается фиксированным. Второй приемник перемещается, а его положения должны определяться в произвольные эпохи. Движение мобильного приемника отражается в неявной форме в уравнениях для одинарных, двойных и тройных разностей через геометрическую дальность. Возьмем мобильную станцию В и спутник i, геометрическое расстояние в статическом случае дается как
![]() , (9.76а)
, (9.76а)
а в случае кинематики
![]() , (9.76б)
, (9.76б)
где появляется зависимость положения пункта В от времени. В этой математической модели в каждую эпоху неизвестны три координаты. Таким образом, полное число неизвестных координат пункта для E эпох равно 3E. Соотношение между числом неизвестных для кинематической съемки следует из моделей одинарных, двойных и тройных разностей для статической съемки (уравнения (9.70), (9.72)):
![]() (9.77)
(9.77)
Например, соотношение
![]() (9.78)
(9.78)
является основным для одинарных разностей, что эквивалентно уравнению (9.43).
Непрерывное движение подвижного приемника ограничивает доступные данные для определения его положения в одну эпоху. Но ни одна из приведенных выше моделей не обеспечивает приемлемое решение при E = 1. Поэтому эти модели модифицируются: число неизвестных уменьшается посредством удаления неизвестных неоднозначностей, то-есть неоднозначности предполагаются известными. Для одинарных разностей это имеет двойной эффект: во-первых, s неоднозначностей можно удалить, и, во-вторых исчезает дефицит ранга из-за известных неоднозначностей, так что необходимо определять только E неизвестных поправок часов. Требование к модифицированным наблюдениям для одинарных разностей, поэтому состоит в том, чтобы sE > 4E и для одной эпохи уменьшается до s > 4. Подобным образом, для двойных разностей s–1 неоднозначностей удаляются в (9.78) так, что в результате (s–1)×E > 3×E, что для одной эпохи уменьшается до s > 4. Следовательно, модели для одинарных и двойных разностей заканчиваются фундаментальным требованием одновременного наблюдения не менее четырех спутников.
Использование тройных разностей в кинематическом методе сильно ограничено. В принципе, определение тройных разностей с двумя спутниками в две эпохи и двумя станциями при фиксированных позициях по отношению к двум эпохам исключают какое-либо применение, поскольку положение мобильной станции изменяется от эпохи к эпохе. Однако тройные разности можно использовать, если координаты подвижного приемника известны в опорную эпоху. В этом случае, применив (9.73) к кинематическому случаю с 3E неизвестными и уменьшив число неизвестных позиций мобильного приемника на 3, из-за его известного положения в опорную эпоху, можно получить соотношение (s – 1)(E –1)> 3(s – 1). Это приводит к s > 4, что является тем же самым требованием, что и для одинарных и двойных разностей с удалением неоднозначностей.
Удаление неоднозначностей из одинарных или двойных разностей означает, что они должны быть известны. Соответствующие уравнения получаются простой перепиской (9.70) и (9.75) с переносом неоднозначностей в левую часть уравнений. Одинарные разности становятся:
![]() (9.79)
(9.79)
а двойные разности становятся
![]() (9.80)
(9.80)
где неизвестные теперь находятся только в правых частях.
Таким образом, все уравнения могут быть решены, если известна хотя бы одна позиция движущегося приемника. Предпочтительно (но не обязательно), что это будет начальная (стартовая) точка движущегося приемника. Базовая линия, связанная с этой начальной позицией, обозначается как стартовый вектор. С известным стартовым вектором определяются неоднозначности и все последующие позиции движущегося приемника до тех пор, пока не произойдет потеря захвата сигналов, и будет наблюдаться не менее четырех спутников [Hofmann-Wellenhof et al. 2001].
9.4.3 Статическая инициализация
Инициализация на земле может выполняться одним из трех методов:
- наблюдение на точках с известными координатами,
- наблюдение базовой линии,
- обмен между приемниками точками установки их антенн.
Простейшая форма инициализации – установить антенны опорной и мобильной станций на точки с известными координатами. Чтобы можно было пренебречь ионосферными и тропосферными задержками, а также для удобства в работе, точки должны быть сравнительно близко. Из уравнения (9.80) следует:
![]() . (9.81)
. (9.81)
Поскольку положение приемников известно, начальные неоднозначности ![]() можно вычислить для каждой двойной разности. Нужно определять, по крайней мере, три неоднозначности, то есть наблюдать не менее четырех спутников. Вычисленные
можно вычислить для каждой двойной разности. Нужно определять, по крайней мере, три неоднозначности, то есть наблюдать не менее четырех спутников. Вычисленные ![]() должны быть округлены до целых значений.
должны быть округлены до целых значений.
Как только начальные неоднозначности известны, можно начинать кинематические измерения. Пусть индексы А и В относятся соответственно к опорному и движущемуся приемникам. Тогда можно легко получить одинарные разности для мобильной станции:
![]()
Если 4 спутника наблюдаются одновременно, то есть три уравнения вида (9.82), пригодных для вычисления положения движущегося приемника. Если же спутников больше, чем 4, то возможен подход по МНК. Требования к точности для координат опорной станции такие же, как и в других GPS измерениях. Естественно, что кинематические измерения в большей степени подвержены влиянию ионосферы, тропосферы и многопутности.
Кинематический режим требует, чтобы во время измерений, пока наблюдается созвездие спутников, не было потерь в счете циклов. Если наблюдается 5 спутников, тогда потерю счета циклов по одному из спутников можно легко восстановить. Три двойных разности, которые не имеют срыва, можно использовать для определения положения приемника в соответствии с (9.82), а затем использовать уравнение (9.81) для вычисления новой неоднозначности, на которой имел место срыв цикла. Эта процедура работает, если три оставшихся двойных разности имеют хорошую геометрию. Если наблюдалось 6 спутников, то допускаются не более двух срывов в одну эпоху. Таким образом, случайный срыв цикла не наносит ущерба до тех пор, пока остаются три хороших двойных разности. Подобным образом устанавливается неоднозначность для появившегося над углом отсечки по высоте нового спутника.
Имея в виду кинематический режим, фирмы производителей аппаратуры оборудует приемники многими каналами на двух частотах. Для получения самой надежной системы возможно объединение GPS-приемника с инерциальной системой с целью преодоления мостов (укрытий), когда приемник теряет захват сразу по всем каналам или поддерживает захват только по 1, 2 или 3 спутникам.
Практически для выполнения инициализации на известной точке достаточно 1 – 2 минуты, для инициализации путем наблюдения базовой линии – до получаса [Leick 1995].
Чтобы уменьшить время, необходимое для выполнения инициализации неоднозначностей Б. Ремонди разработал метод инициализации посредством обмена антеннами. Предположим, что в эпоху t1 приёмник R1 с антенной А1 находится на станции А, а приёмник R2 с антенной А2 – на станции В (рис. 9.4). Двойную разность (в циклах) со станций А, В на спутники i, j в эпоху t1 можно записать:
![]() (9.83)
(9.83)
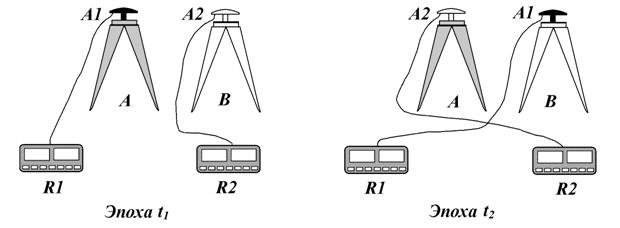
Рис. 9.4. Инициализация путем обмена позициями антенн приемников.
Если выполняется обмен антеннами, то в эпоху t2 антенна А1 устанавливается на станции В, а антенна А2 – на станции А и записываются соответствующие измерения. Тогда, для эпохи t2 двойная разность равна
![]() (9.84)
(9.84)
Вычитание наблюдений двух эпох дает:
![]()
 (9.85)
(9.85)
Заметим, что соответствующие топоцентрические дальности имеют в (9.85) один и тот же знак. Из-за непрерывного движения спутников эти расстояния изменяются во время операции обмена антеннами. Даже если спутники не двигались бы вообще, уравнение (9.85) можно решить для базовой линии АВ. Решение требует, как обычно, наблюдений не менее четырех спутников, дающих не менее трех уравнений, которые решаются для положения пункта В при фиксированной станции А. Как только положение приемника В известно, неоднозначности получаются из уравнений вида (9.81).
Полезно сравнить (9.85) с решением по тройным разностям, если бы антенны не переставлялись. Для линии АВ тройная разность равна:
![]() . (9.86)
. (9.86)
Соответствующие топоцентрические расстояния в (9.86) имеют противоположные знаки, и для короткого периода времени разности этих расстояний стремятся к нулю, в то время как в уравнении (9.85) эти расстояния складываются.
Качество кинематического решения по GPS, как всегда, зависит от геометрии спутникового решения и числа спутников. Чем больше спутников, тем строже решение. Поскольку созвездие спутников хорошо предсказуемо заранее, и поскольку положения спутников заранее известны, можно моделировать точность определения заранее, вычисляя ковариационную матрицу положения станции (или вектора от фиксированного до движущегося приемника) на основе выбора спутников и времени наблюдений на станции. Аналогично PDOP, который особенно популярен в навигации, К. Гоадом было введено понятие RDOP (Relative dilution of precision):
![]() . (9.87)
. (9.87)
где P - безразмерная весовая матрица двойных разностей, А - матрица плана, состоящая из частных производных по компонентам базовой линии. Размерность RDOP - циклы на метр [Leick 1995].
9.4.4 Кинематическая инициализация
Некоторые применения требуют кинематический метод GPS без статической инициализации, поскольку движущийся объект, чье положение должно вычисляться, находится в постоянном движении (например, самолет при аэрофотосъемке или судно при гидрографической съемке). Этот наиболее сложный для определения случай представляет собой определение неоднозначностей в движении (на лету, On-the-Fly, OTF).
Метод кинематической инициализации требует, чтобы фазовые неоднозначности были надежно разрешены в режиме реального времени, то есть практически за несколько секунд. Пока они неизвестны, сантиметровый уровень точности недостижим. Условия, при которых неоднозначности могут быть успешно разрешены в движении, зависят не только от совершенства программы, но и от целого ряда физических факторов. К ним относятся: расстояние между приемниками, количество спутников, наличие многопутности и других немоделируемых ошибок, доступность фаз на двух частотах и на полной длине волны, а также количество потерь счета циклов.
Все методики инициализации в движении требуют оценки начальной позиции мобильного приемника и ее средней квадратической ошибки для того, чтобы определить физический объем исследования и идентифицировать пробные наборы неоднозначностей. Все методики обычно дают подходящие наборы неоднозначностей и должны обеспечивать такие методы, которые позволяют отличать и отделять самое лучшее и второе лучшее решение и т. д. Метод инициализации в движении предполагает, что правильное решение соответствует целым неоднозначностям. Если была потеря в счете циклов, то неоднозначность для данной последовательности двойных разностей должна определяться заново. Как и при статической инициализации, проблем из-за потерь счета циклов не будет, если поддерживать захват сигналов от 4-х и более спутников. Однако если есть срыв сразу по всем спутникам, или, если слежение сохранилось на 1 - 3 спутниках, то исследование неоднозначности должно быть повторено с новой эпохи. Если имеют место постоянные срывы циклов, то неоднозначности разрешить невозможно. Как только неоднозначности разрешены, можно определять положения приемника и вперед, и назад по времени, используя уравнение (9.64).
Оценка начального положения и исследуемого объема наилучшим образом выводится по двойным разностям псевдодальностей, полученным по P(Y)-коду или C/A-коду. Чем выше точность начального положения, тем быстрее работает алгоритм исследования. Если псевдодальности по P(Y)-коду не измеряются, то можно использовать C/A-кодовые псевдодальности современных приемников с узкими корреляторами. Средние квадратические ошибки (стандартные отклонения) этих кодовых решений служат для определения размера исследуемого объема, в котором должно находиться истинное положение мобильной станции. Сглаживание кодовых наблюдений по фазам также может быть полезным в определении меньшего объема исследований.
Объединение кодовых и фазовых решений между эпохами производится в соответствии с формулой:
![]() . (9.88)
. (9.88)
Она позволяет вычислять двойные разности псевдодальностей эпохи t1 от более поздних эпох t. Это наблюдение может быть уточнено по нескольким измерениям и использовано для определения начального положения.
Исследование объема и пробных наборов неоднозначностей. Для определения объема иногда используется эллипсоид исследований. Однако, более простая форма исследуемого объема - это куб, размеры которого пропорциональны средним стандартным отклонениям определения начального положения (рис. 9.5). Если положение любого угла куба обозначено как С, то неоднозначности можно вычислить из уравнения:
![]() . (9.89)
. (9.89)
Рис. 9.5. Объем исследований неоднозначностей в виде куба.
Значение неоднозначности  вычисляется для каждого угла куба, все восемь углов определяют пределы неоднозначностей. Эта процедура дает пределы для неоднозначностей фаз на частотах L1 и/или L2, а также для разностной (широкополосной) и суммарной (узкополосной) комбинаций. Число возможных комбинаций, образующих наборы неоднозначностей быстро растет с увеличением объема и числа спутников. При реальном внедрении техники OTF необходимо прибегать к специальным методикам, которые дают уверенность в том, что используется только физически значимая комбинация неоднозначностей.
вычисляется для каждого угла куба, все восемь углов определяют пределы неоднозначностей. Эта процедура дает пределы для неоднозначностей фаз на частотах L1 и/или L2, а также для разностной (широкополосной) и суммарной (узкополосной) комбинаций. Число возможных комбинаций, образующих наборы неоднозначностей быстро растет с увеличением объема и числа спутников. При реальном внедрении техники OTF необходимо прибегать к специальным методикам, которые дают уверенность в том, что используется только физически значимая комбинация неоднозначностей.
Передача (распространение) пробного положения. Самый общий случай в кинематическом позиционировании заключается в вычислении объема исследований и пробных наборов неоднозначностей для каждой эпохи. Если алгоритм исследования достаточно быстрый, то можно выполнять исследование объема неоднозначностей для каждой эпохи. При условии, что имеется достаточное качество геометрии и объем измерений для получения решения, положение подвижного приемника можно было бы определить независимо в каждую эпоху. При отсутствии указанных условий несколько эпох должны объединяться, и, таким образом, возникает проблема передачи пробных положений от одной эпохи к другой. Передаваться должны только те пробные положения, которые еще не отброшены. Для этого можно воспользоваться уравнением тройной фазовой разности, которое в данном случае записывается следующим образом:
 . (9.90)
. (9.90)
Через тройные разности для геометрических дальностей это уравнение записывается в компактной форме:
![]() . (9.91)
. (9.91)
или
![]() . (9.92)
. (9.92)
Если те же самые четыре спутника наблюдаются в последующие эпохи, то можно вычислить три тройные разности и из решения трех уравнений вида (9.92) найти положение движущегося приемника В в эпоху t2. Каждая пробная позиция распространяется таким образом от одной эпохи к другой. В течение промежутка времени, на котором распространяются пробные позиции, не должно быть срывов циклов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
