
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Уравнивание СГС можно производить в прямоугольных пространственных координатах X, Y, Z, в геодезических координатах B, L, H на эллипсоиде, или в плоских координатах в некоторой проекции.
Уравнивание в прямоугольной системе координат. Если уравнивание производится в прямоугольных пространственных координатах параметрическим методом, то математической моделью измерений является обычная модель уравнений наблюдений:
 , (12.37)
, (12.37)
где ![]() - уравненный вектор наблюдений, а
- уравненный вектор наблюдений, а  - уравненные координаты станций. Такая математическая модель от природы линейна. Вектор наблюдений между станциями А и В записывается:
- уравненные координаты станций. Такая математическая модель от природы линейна. Вектор наблюдений между станциями А и В записывается:
 . (12.38)
. (12.38)
Выразим координаты станций через их предварительные (априорные) значения ![]() и поправки к ним
и поправки к ним  :
:
 , (12.39)
, (12.39)
Теперь уравнение поправок для одной базовой линии можно записать в виде:
 , (12.40)
, (12.40)
или
 , (12.41)
, (12.41)
где ![]() - вектор поправок (матрица-столбец) в измеренные компоненты вектора базовой линии
- вектор поправок (матрица-столбец) в измеренные компоненты вектора базовой линии ![]() :
:
 , (12.42)
, (12.42)
а ![]() - свободный член, определяемый выражением:
- свободный член, определяемый выражением:
 . (12.43)
. (12.43)
Система уравнений поправок для всей сети записывается в виде:
 . (12.44)
. (12.44)
Матрица плана А для модели (12.37) состоит из 1, -1 и 0, ее фрагмент для линии AB выглядит следующим образом:
 . (12.45)
. (12.45)
Матрица плана выглядит так же, как для нивелирной сети. Каждая базовая линия вносит в матрицу плана три столбца. Вектор неизвестных поправок в параметры ![]() состоит из векторов поправок
состоит из векторов поправок ![]() в координаты пунктов:
в координаты пунктов:
,
 , (12.46)
, (12.46)
а вектор свободных членов l и вектор поправок v состоят соответственно из отдельных векторов свободных членов и векторов поправок в компоненты базовых линий.
Из-за того, что наблюдение вектора содержит информацию об ориентировке и масштабе сети, достаточно зафиксировать только начало координатной системы. Минимальные ограничения для фиксирования начала можно наложить просто удалением трех параметров координат одной станции из набора параметров. Таким приемом данная станция будет зафиксирована.
При ограниченном уравнивании в качестве дополнительных неизвестных в параметрические уравнения могут вставляться параметры связи между системами координат и высот (см. разделы 12.5.6, 12.5.7).
Уравнивание на поверхности эллипсоида. Уравнивание на эллипсоиде позволяет разделять влияние ошибок в плане и по высоте и в необходимых случаях локализовать грубые ошибки центрирования или измерения высоты антенны. Для уравнивания на эллипсоиде компоненты векторов базовых линий преобразуются в длины геодезических линий, их геодезические азимуты и приращения эллипсоидальных высот. Для этого вычисляются приращения координат E, N, U в локальной геодезической системе [Leick 1995]:
 (12.47)
(12.47)
где матрица ![]() вычисляется по геодезическим координатам начала вектора базовой линии:
вычисляется по геодезическим координатам начала вектора базовой линии:
 . (12.48)
. (12.48)
Геодезический азимут с пункта А на пункт В вычисляется по формуле:
 , (12.49)
, (12.49)
где ![]() - поправка за высоту наблюдаемого пункта B, вычисляемая по азимуту АAB и радиусу кривизны нормального сечения эллипсоида
- поправка за высоту наблюдаемого пункта B, вычисляемая по азимуту АAB и радиусу кривизны нормального сечения эллипсоида ![]() в этом азимуте:
в этом азимуте:
 (12.50)
(12.50)
 . (12.51)
. (12.51)
В формулах (12.50) и (12.51): NA – радиус кривизны эллипсоида в первом вертикале в пункте A, ![]() - второй эксцентриситет эллипсоида, Bm – средняя широта между пунктами.
- второй эксцентриситет эллипсоида, Bm – средняя широта между пунктами.
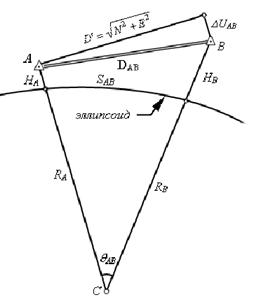
Высота точки B над эллипсоидом (рис. 12.1) вычисляется по формулам:
 (12.52)
(12.52)
 (12.53)
(12.53)
а расстояние ![]() между пунктами на эллипсоиде по геодезической:
между пунктами на эллипсоиде по геодезической:
 , (12.54)
, (12.54)
где угол ![]() определяется из выражения:
определяется из выражения:
 (12.55)
(12.55)
Рис. 12.1. Геометрия базовой линии.
Уравнения поправок для геодезического азимута, длины геодезической и приращения эллипсоидальных высот можно найти в книге [Герасимов 1996]. Описания других математических моделей уравнивания, применяемых для GPS-измерений, см. в работах [Bock et al. 1985; Teunissen et al. 1998; Leick 1995; King et al. 1987].
12.5.3 Стохастические модели уравнивания сети
Важность стохастической модели сети очевидна: она дает информацию об ее точности. Тем самым достигается исправление более грубых измерений большими поправками, а более точных измерений – меньшими поправками. Если же стохастическая модель сети содержит ошибочную информацию, то результаты уравнивания и заключение о нем будут ненадежны.
Стохастическая модель GPS-сети представляется ковариационными матрицами, получаемыми при решении отдельных базовых линий:
 , (12.56)
, (12.56)
в которых диагональные члены – дисперсии приращений координат базовых линий, а недиагональные члены – их ковариации. Основной недостаток этих матриц заключается в том, что они характеризуют точность базовых линий по внутренней сходимости. Здесь не учитывается влияние ошибок центрирования, измерения высоты антенны, могопутности и ошибок положений фазовых центров, некоррелированных ошибок тропосферной и ионосферной задержек и других немоделируемых ошибок. Хотя ковариационные матрицы векторов базовых линий не дают возможности судить о реальной точности их координат, по ним можно составить некоторые выводы об условиях наблюдений.
Обычно используется один из трех способов корректировки ковариационных матриц, для того чтобы сделать их более адекватными реальным условиям измерений.
Можно вычислить невязки в замкнутых фигурах и по ним рассчитать среднюю квадратическую ошибку m любой из разностей координат ![]() по формуле (11.24), то есть. сделать оценку по внешней сходимости. Обычно эта ошибка в 5 – 10 раз больше ошибок, представленных в ковариационных матрицах базовых линий. В то же время матрицы КXYZ позволяют учесть взаимозависимость между разностями координат. Для установления такого соответствия предлагается выбирать в каждой матрице три диагональных элемента K11, K22, K33 и вычислять по ним
по формуле (11.24), то есть. сделать оценку по внешней сходимости. Обычно эта ошибка в 5 – 10 раз больше ошибок, представленных в ковариационных матрицах базовых линий. В то же время матрицы КXYZ позволяют учесть взаимозависимость между разностями координат. Для установления такого соответствия предлагается выбирать в каждой матрице три диагональных элемента K11, K22, K33 и вычислять по ним ![]() . Для сети из всех
. Для сети из всех ![]() определяется среднее арифметическое значение:
определяется среднее арифметическое значение:
 . (12.57)
. (12.57)
После этого каждая ковариационная матрица умножается на величину ![]() . Полученные таким образом ковариационные матрицы
. Полученные таким образом ковариационные матрицы
 (12.58)
(12.58)
используются для уравнивания в прямоугольных координатах. Описанный прием операции масштабирования ковариационных матриц приводится в статье [Герасимов, Сластенов 1994] и электронной книге [Rizos 1995].
Другой прием корректировки стохастической модели сети – стратегия станций [TRIMNET 1991]. Этот метод заключается в добавлении в масштабированную ковариационную матрицу априорных ошибок центрирования mc и измерения высоты антенны mah. Ошибку mc можно разложить на составляющие mc, E и mc, N соответственно вдоль координатных осей E и N:
 . (12.59)
. (12.59)
Полагая, что обе составляющие равны между собой, поскольку нет оснований считать, что ошибка центрирования в некотором направлении будет больше, вводят дополнительные составляющие в ковариационную матрицу локальных геодезических координат KENU:
 , (12.60)
, (12.60)
Ковариационные матрицы ![]() получаются из матриц
получаются из матриц ![]() (или
(или ![]() ) разностей прямоугольных координат по известной схеме:
) разностей прямоугольных координат по известной схеме:
 , (12.61)
, (12.61)
где матрица R определяется в соответствии с формулой (12.48)
10.1.14.1 Далее матрицы KDENU: конвертируются в ковариационные матрицы для геодезических азимутов, длин геодезических линий и приращений геодезических координат:
![]() . (12.62)
. (12.62)
Выражение для матрицы J (матрица Якоби) находится путем дифференцирования функций для A, S, DH:
 (12.63)
(12.63)
Выражения для частных производных для (12.63) в явном виде можно найти в [Герасимов 1996; Leick 1995].
Поскольку А и S не зависят от U, то в итоге дополнительная ошибка центрирования mc увеличивает дисперсии в азимуте и длине геодезической, а дополнительная ошибка высоты антенны увеличивает дисперсию в DН.
Можно сразу разложить ошибку mc на дополнительную ошибку азимута mA и ошибку длины геодезической mS и ввести соответствующие дополнительные дисперсии в матрицу ![]() .
.
В третьем приеме корректировки ковариационной матрица величины, называемом стратегией суммирования назначаются дополнительные ошибки для азимутов, длин геодезических и приращений эллипсоидальных высот. Эти дополнительные ошибки возводятся в квадрат и складываются с соответствующими дисперсиями в ковариационных матрицах ![]() . Суммирование может производиться либо для одного какого-либо вида параметров, либо для их комбинаций. Величина дополнительной ошибки для каждой базовой линии может назначаться индивидуально, либо можно назначать одинаковые ошибки для всех базовых линий [TRIMNET 1991].
. Суммирование может производиться либо для одного какого-либо вида параметров, либо для их комбинаций. Величина дополнительной ошибки для каждой базовой линии может назначаться индивидуально, либо можно назначать одинаковые ошибки для всех базовых линий [TRIMNET 1991].
12.5.4 Решение системы уравнений поправок
Решение составленной системы уравнений поправок (12.44) с исправленной априорной ковариационной матрицей (12.58) решается в следующем порядке:
- находится весовая матрица P через априорную дисперсию единицы веса ![]() :
:
 , (12.64)
, (12.64)
-составляется система нормальных уравнений
 , (12.65)
, (12.65)
в которой
 , (12.66)
, (12.66)
- находится вектор оцениваемых параметров
 , (12.67)
, (12.67)
- находится апостериорная дисперсия единицы веса
 , (12.68)
, (12.68)
где r – число степеней свободы (число избыточных измерений), равное разности числа всех измерений и числа неизвестных:
 . (12.69)
. (12.69)
Здесь n - число базовых линий, N – число определяемых пунктов.
Далее составляется апостериорная ковариационная матрица ![]() уравненных прямоугольных или геодезических координат пунктов:
уравненных прямоугольных или геодезических координат пунктов:
 . (12.70)
. (12.70)
Ее дополняет полная ковариационная матрица приращений координат, азимутов базовых линий и приращений высот для всех возможных комбинаций пунктов [Герасимов 1996].
Ковариационные матрицы позволяют судить о качестве и надежности уравнивания. Высокая точность результатов уравнивания не всегда свидетельствует о его надежности: возможны необнаруженные грубые ошибки и систематические влияния, искажающие математическую модель уравнивания. Грубые модели уравнивания обнаруживаются тем надежнее, чем выше избыточность сети.
Для оценки качества уравнивания применяются различные статистические тесты. Вероятностный тест c2 основан на сумме взвешенных квадратов поправок ![]() , числе степеней свободы и уровне доверия (проценте вероятности). Назначение этого теста – отвергнуть или принять гипотезу о том, что предсказанные ошибки были точно оценены. Если тест не проходит, то это указывает на то, что все или несколько наблюдений необходимо проверить, или даже перенаблюдать. Если проверка вычислений не дает желаемого результата, то ошибочные измерения удаляют из уравнивания. Однако невыполнение теста c2 может быть также вызвано неадекватной стохастической моделью, или неадекватной математической моделью, или ими обеими.
, числе степеней свободы и уровне доверия (проценте вероятности). Назначение этого теста – отвергнуть или принять гипотезу о том, что предсказанные ошибки были точно оценены. Если тест не проходит, то это указывает на то, что все или несколько наблюдений необходимо проверить, или даже перенаблюдать. Если проверка вычислений не дает желаемого результата, то ошибочные измерения удаляют из уравнивания. Однако невыполнение теста c2 может быть также вызвано неадекватной стохастической моделью, или неадекватной математической моделью, или ими обеими.
Вероятностный t-тест (t-критерий), опирающийся на распределение Стьюдента, которое в свою очередь базируется на числе наблюдений, доверительной вероятности (95%) и числе степеней свободы, позволяет выявить грубые измерения. Дополнительную информацию для анализа дают гистограммы распределения нормализованных ошибок и эллипсы (эллипсоиды) ошибок [Leick 1995; TRIMNET 1991].
12.5.5 Особенности свободного и ограниченного уравнивания спутниковой сети
Начальная стадия уравнивания сети – это свободное уравнивание. Оно дает возможность оценить внутреннюю точность сети, проверить оценки погрешностей отдельных определений базовых линий и выявить любые промахи в них. Система уравнений поправок для сети имеет вид (12.44), ей соответствует весовая матрица Р, получаемая либо непосредственно через ковариационные матрицы базовых линий, либо с привлечением некоторой стратегии взвешивания. При условии, что поправки измерений имеют гауссово распределение с нулевым средним, минимизация взвешенной суммы квадратов поправок дает наиболее вероятную оценку вектора неизвестных ![]() , определяемую из решения нормальных уравнений (12.66).
, определяемую из решения нормальных уравнений (12.66).
Для обращения нормальной матрицы  и получения единственного решения нормальных уравнений необходимо определить начало координатной системы в геодезической сети, иначе матрица плана будет иметь дефект ранга. В этом случае возможно решение с применением псевдообращения матриц. Можно зафиксировать координаты одной из станций и выполнить минимально ограниченное уравнивание. Иногда фиксируется центр тяжести сети («центроид»), определенный по априорным координатам пунктов. Ковариационная матрица в таком решении имеет минимальный след и является удобным индикатором точности сети. Из этой ковариационной матрицы легко вычисляется эллипсоид ошибок для каждой станции. Независимо от выбора начала сети уравненные базовые векторы будут одними и теми же.
и получения единственного решения нормальных уравнений необходимо определить начало координатной системы в геодезической сети, иначе матрица плана будет иметь дефект ранга. В этом случае возможно решение с применением псевдообращения матриц. Можно зафиксировать координаты одной из станций и выполнить минимально ограниченное уравнивание. Иногда фиксируется центр тяжести сети («центроид»), определенный по априорным координатам пунктов. Ковариационная матрица в таком решении имеет минимальный след и является удобным индикатором точности сети. Из этой ковариационной матрицы легко вычисляется эллипсоид ошибок для каждой станции. Независимо от выбора начала сети уравненные базовые векторы будут одними и теми же.
В свободном уравнивании к нормальным уравнениям добавляются внутренние ограничения:
 , (12.71)
, (12.71)
где Е – матрица размера 3´3N (N – число станций в сети), состоящая из единичных матриц I, каждая размером 3´3:
 . (12.72)
. (12.72)
Назначение этих ограничений сводится к тому, чтобы сумма координатных сдвигов и возможных смещений в ориентировке и длине базовых линий была равна нулю. Решение свободного уравнивания для поправок в координаты пунктов будет:
 , (12.73)
, (12.73)
а ковариационная матрица оцененных координат станций имеет вид:
 . (12.74)
. (12.74)
Апостериорная дисперсия находится по формуле (12.68), но число степеней свободы теперь равно:
 . (12.75)
. (12.75)
При ограниченном уравнивании все опорные точки фиксируются на их каталожных положениях, а остальная сеть подгоняется под них. Эта этап уравнивания используется для вычисления окончательных координат и оценки ошибок на контрольных станциях. Кроме того, в процессе ограниченного уравнивания производится преобразование координат между системами относимости и перевод измеренных разностей геодезических высот в разности нормальных высот, о чем будет рассказано ниже
При уравнивании на эллипсоиде решение систем уравнений поправок выполняется методом итераций, в котором добиваются сходимости уравненных координат. Это объясняется тем, что коэффициенты в уравнениях наблюдений при поправках в координаты зависят от самих координат и точны только при малых координатных сдвигах [Герасимов 1996; Маркузе 1997; Leick 1995; Rizos 1999; TRIMNET 1991].
Результаты спутниковых геодезических измерений получаются после обширной обработки данных, записанных в памяти приемников. Главными особенностями обработки фазовых измерений для целей геодезии являются:
- интенсивное использование метода наименьших квадратов, теории ошибок и статистики в методиках оценивания при обработке спутниковых данных;
- определение трехмерных координат в геоцентрической прямоугольной системе;
- результаты обработки подвержены действию погрешностей и относительного метода определения базовых линий, и опорной системы, в которой выражаются какие-либо фиксированные (или известные) геодезические величины, такие как координаты станций или орбиты спутников;
- геодезические измерения обрабатываются по этапам, путем объединения отдельных сеансов (сессий) в полную наблюдательную кампанию, после чего они могут объединяться с ранее измеренной сетью;
- вычисления базовых линий начинаются после того, как данные из нескольких приемников физически объединяются вместе (в компьютере – пост-обработка, а в контроллере или приемнике – обработка в режиме реального времени). Степень совершенства программы компьютерной обработки является функцией искомой окончательной точности результатов.
Каждая из этих особенностей кратко описывается в следующих разделах.
Уравнивание по МНК включает две модели:
Функциональная модель, связывающая измерения и параметры. Наиболее общий подход, это использование уравнений наблюдений в общей форме ![]() . Чтобы удовлетворять этому соотношению, действительные наблюдения необходимо исправить или «уравнять». Для параметров, подлежащих уравниванию, выполняется линеаризация относительно приближенных значений параметров:
. Чтобы удовлетворять этому соотношению, действительные наблюдения необходимо исправить или «уравнять». Для параметров, подлежащих уравниванию, выполняется линеаризация относительно приближенных значений параметров:
 7.1-1)
7.1-1)![]()
Выражение в скобках является членом «наблюденное минус вычисленное» или приближенной остаточной невязкой и обозначается как v°. I и l являются соответственно истинным и действительным наблюдениями, а x и x° - истинное и приближенное (или априорное) значения параметров. Величины dx являются поправками к приближенным параметрам, а А – матрица коэффициентов (матрица плана), содержащая частные производные от наблюдений по параметрам.
Стохастическая модель, описывающая статистики измерений. Она имеет форму весовой матрицы P, или обратной ковариационной матрицы наблюдений. Например, все наблюдения могут быть независимыми (то есть иметь диагональную весовую матрицу) и иметь одинаковые стандартные отклонения.
9.3.1 Уравнивание по методу наименьших квадратов
11 Стандартное уравнивание. Есть много методик уравнивания, которые можно использовать, но метод наименьших квадратов с параметрами является единственным, обсуждаемым здесь. Он основан на уравнениях, в которых наблюдения выражаются как функции неизвестных параметров. В случае нелинейных функций обычно выполняется разложение в ряд Тейлора. Это требует приближенных значений для параметров. Чтобы получить линейную функцию относительно неизвестных, разложения в ряд Тейлора должны обрываться после второго члена. Полученная линейная модель наблюдений может быть представлена в матрично-векторном обозначении как
![]() (9.65)
(9.65)
где l – вектор наблюдений, А – матрица коэффициентов, x – вектор неизвестных.
Введя дополнительные определения: ![]() - априорная дисперсия, S - ковариационная матрица, получаем кофакторную матрицу наблюдений:
- априорная дисперсия, S - ковариационная матрица, получаем кофакторную матрицу наблюдений:
![]() (9.66)
(9.66)
и весовую матрицу
![]() (9.67)
(9.67)
Считая, что число наблюдений равно n, а число неизвестных параметров – u, получаем, что матрица А состоит из n строк и u столбцов. При n>u система (9.65) является переопределенной и, в общем, несогласованной из-за ошибок наблюдений или шума. Чтобы обеспечить согласованность, к вектору наблюдений добавляется вектор поправок (шума) v, и уравнение (9.65) преобразуется в
![]() (9.68)
(9.68)
Решение этой системы становится единственным при выполнении принципа наименьших квадратов ![]() . Применение этого принципа минимизации к уравнению наблюдений (9.68) приводит к системе нормальных уравнений
. Применение этого принципа минимизации к уравнению наблюдений (9.68) приводит к системе нормальных уравнений
![]() (9.69)
(9.69)
с решением
![]() (9.70)
(9.70)
которое можно упростить до
![]() (9.71)
(9.71)
где  , а
, а  .
.
Кофакторная матрица неизвестных Qx (ковариационная апостериорная матрица неизвестных) следует из формулы ![]() , если применить закон распространения дисперсий как
, если применить закон распространения дисперсий как
![]() (9.72)
(9.72)
и после подстановки ![]() преобразуется в
преобразуется в
.![]() (9.73)
(9.73)
Последовательное уравнивание (рекуррентное уравнивание)
Предположим, что модель наблюдений (9.68) состоит из двух массивов данных:
 (9.74)
(9.74)
Используя только первый массив, можно в соответствии с (9.70) и (9.73) вычислить предварительное решение x(0) по формулам:
 (9.75)
(9.75)
Если между двумя массивами отсутствует корреляции, то весовая матрица является блочно-диагональной:
 (9.76)
(9.76)
Матрица N и вектор L для уравнивания всего массива наблюдений получаются после сложения соответствующих матриц и векторов двух частей массивов:
 (9.77)
(9.77)
Если изменение в предварительном решении x(0) из-за дополнительного массива наблюдений l обозначить через Dx, то выражение
![]() (9.78)
(9.78)
представляет соответствующую формулировку уравнивания. Это уравнение можно слегка преобразовать:
![]() , (9.79)
, (9.79)
и упростить правую часть (ср. с ур. (9.75)), поскольку ![]() , поэтому получается
, поэтому получается
![]()
![]() . (9.80)
. (9.80)
Подстановка L2 и N2 из (9.77) дает
![]() (9.81)
(9.81)
или
![]() (9.82)
(9.82)
и
![]() , (9.83)
, (9.83)
или, окончательно,
![]() , (9.84)
, (9.84)
где
![]() . (9.85)
. (9.85)
Заметим, что член ![]() в формуле (9.84) можно рассматривать как прогноз для наблюдений l2
в формуле (9.84) можно рассматривать как прогноз для наблюдений l2
Изменение DQ по отношению к предварительному значению кофакторной матрицы ![]() получается из соотношения
получается из соотношения
1
![]() , (9.86)
, (9.86)
где через I обозначена единичная матрица. Это уравнение преобразуется как
![]() , (9.87)
, (9.87)
и, поскольку  , то эта формула редуцируется до
, то эта формула редуцируется до
![]() , (9.88)
, (9.88)
откуда
![]() , (9.89)
, (9.89)
а подставив N2 из (9.77), получаем:
![]() . (9.90)
. (9.90)
После сравнения с уравнения (9.85), видно, что в (9.90) можно подставить K:
![]() . (9.91)
. (9.91)
Матрица К, которая рассматривается как матрица усиления, удовлетворяет замечательному соотношению:
![]() . (9.92)
. (9.92)
Это соотношение основано на формуле, выведенной Беннетом. Дополнительную информацию см. в Moritz (1980), уравнения (19-12) и (19-13). Назначение этого уравнения – обращение матриц типа (C + D), где С-1 известна a priori. Идентичность (9.92) можно доказать, умножив обе части равенства слева на ![]() и справа на
и справа на ![]() .
.
Полезно узнать из уравнения (9.92), что первая форма для матрицы K подразумевает обращение матрицы размера n´n, где n –число неизвестных параметров; в то время как для второй формы необходимо обращение матрицы размера n2´n2, где n2 – число неизвестных во втором массиве. Поэтому вторая форма имеет преимущество, так как обычно n2 < n.
Окончательное замечание должно заключить раздел о последовательном (рекуррентном) уравнивании. Формально, если выполняется подстановка А1=I и l1=x(0), то модель для последовательного уравнивания формулируется как
 (9.93)
(9.93)
Модель (9.93) отражает, что предварительные оценки x(0) для неизвестных параметров включены в последовательное уравнивание как наблюдения. Этот метод часто используется в контексте Калмановской фильтрации.
9.3.2 Калмановская фильтрация
Вступление
Рассмотрим динамическую систему, такую, как транспортное средство. Неизвестные параметры, такие как координаты и скорость, образуют элементы вектора состояния. Этот зависящий от времени вектор можно предсказать на любой момент t посредством системы уравнений. Предсказанную величину можно улучшить или обновить по наблюдениям, содержащим информацию о некоторых компонентах вектора состояния.
Вся эта процедура известна как Калмановская фильтрация. Она соответствует последовательному уравниванию в статическом случае. Следовательно, получаются оптимальные оценки неизвестных на основе всех наблюдений вплоть до эпохи t. Однако заметим, что нет необходимости хранить все эти данные для последующих эпох.
Предсказание
Зависящий от времени вектор состояния x(t), состоящий из неизвестных параметров динамической системы, можно моделировать с помощью системы дифференциальных уравнений первого порядка как
![]() (9.94)
(9.94)
где ![]() - производная по времени от вектора состояния,
- производная по времени от вектора состояния, ![]() - матрица динамики,
- матрица динамики, ![]() - шум движения. В дальнейшем предполагается, что в начальную эпоху t0 вектор состояния x(t0) и его кофакторная матрица предполагаются известными. Общее решение для системы уравнений (9.94) существует только тогда, когда матрица F(t) содержит периодические или постоянные коэффициенты. Для последнего случая это решение можно записать как
- шум движения. В дальнейшем предполагается, что в начальную эпоху t0 вектор состояния x(t0) и его кофакторная матрица предполагаются известными. Общее решение для системы уравнений (9.94) существует только тогда, когда матрица F(t) содержит периодические или постоянные коэффициенты. Для последнего случая это решение можно записать как
 . (9.95)
. (9.95)
Чтобы выразить матрицу перехода Т как функцию матрицы динамики F, вектор состояния в эпоху t выражается в виде разложения в ряд Тейлора. Таким образом, получается
![]() (9.96)
(9.96)
Подстановка (9.94) в предположении, что матрица динамики постоянна, и пренебрегая при этом шумом движения w(t), дает
![]() (9.97)
(9.97)
что по сравнению с (9.95) можно записать в виде
![]() . (9.98)
. (9.98)
В дальнейшем, после введения замены ![]() , матрица перехода получается как бесконечный ряд относительно F посредством выражения
, матрица перехода получается как бесконечный ряд относительно F посредством выражения
![]() . (9.99)
. (9.99)
Кофакторная матрица Qx вектора состояния x(t) может быть вычислена через (9.95) посредством использования правила распространения дисперсии, дающего
![]() . (9.100)
. (9.100)
Рассмотрев уравнения (9.95) и (9.100), можно сделать заключение, что основная проблема Калмановской фильтрации заключается в определении матрицы перехода Т и кофакторной матрицы Qe.
Обновление (update)
Стартуя в начальную эпоху t0, вектор состояния x(t) можно предсказывать на любую произвольную будущую эпоху t с помощью системы уравнений (9.95). С учетом шума системы e(t) предполагается, что наблюдения l(t) и соответствующие кофакторные матрицы Ql доступны в эпоху t. Эти данные можно сравнить с обновленным вектором состояния ![]() , возможно, после необходимой линеаризации, с помощью уравнения
, возможно, после необходимой линеаризации, с помощью уравнения

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
