
Система уравнений (6.14÷6.19) дает возможность исследовать погрешности ММГ, обусловленные технологическими допусками на геометрические размеры, либо влиянием температуры на конструктивные параметры гироскопа. Технологические допуски на геометрические размеры ММГ приводят к изменению номинальных значений моментов инерции и масс рамок (см. 6.44, 6.45), характеристик жесткости торсионов (см. 6.46) и электростатического момента (6.46). При этом возможно изменение и параметров демпфирования. Смещения центров масс рамок относительно их геометрических центров приводит к изменению их моментов инерции и появлению дополнительных возмущающих моментов.
Температурные погрешности ММГ исследованы в работах [40,41,42,43]. Изменения температуры окружающей среды по сравнению с номинальной приводит к изменению плотности материала по объему и геометрических размеров элементов конструкции, а следовательно, к изменению моментов инерции и появлению смещений центров масс ММГ. Изменение плотности и линейного размера стержневого элемента конструкции определяются известными формулами:
|
(6.99)
где: р0,l0 — номинальные значения плотности материала и линейного размера конструктивного элемента;
температурные коэффициенты для кремния αT = 4,2∙10 -6 [l/°C], βг ≈ 3αT
Т(х) — распределение температуры по длине конструктивного элемента (рис. 6.16):
|
(6.100)
где: Т0 — максимальное превышение абсолютной температуры над номинальной; ΔT — максимальный температурный перепад.
|
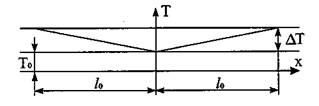
Рис. 6.16. Изменение температуры по длине элемента
|
Зависимость жесткости торсионов на кручение и изгиб от температуры определяется формулой
(6.101)
где: G0 — номинальное значение жесткости (на кручение или изгиб);
αЕ = 10-6 [l/° С ] — температурный коэффициент модуля упругости.
Пример 4.
Рассчитаем относительные изменения основных конструктивных параметров ММГ, полагая, что ТХ = Т0 = 100°С; аT = 4,2∙106 [1/°С]; βг = Зαг; αЕ = 10-6 [1/°С]. Имея в виду формулы (6.99) и (6.100), выражения (6.41) принимают вид
|

где: А1, С1, А2, С2 — определяются формулами (6.41).
Относительное изменение моментов инерции (ΔТ-l) ∙100 = 0,0835%. В соответствии с формулой (6.45) запишем величину температурно измененной жесткости

Относительное изменение жесткости 0,086%. Имея в виду температурные зависимости S(T), L2(T),h(T),B соответствии с формулой (6.46) получим

т. е. относительное изменение электростатического момента 0,042%.
Из приведенного примера следует, что влияние температуры на изменение номинальных значений основных конструктивных параметров ММГ пренебрежимо мало. Наличие смещений центров масс элементов ММГ (температурных или технологических) в сочетании с ускорением основания может привести к ощутимым погрешностям измерения угловой скорости основания.
6.2. Камертонные гироскопы
ММГ, кинематическая схема которого показана на рис. 6.17, был создан в лаборатории им. Ч. Дрейпера [116], [119]. Примерные размеры ММГ: (2∙103∙4∙103∙20) ∙10-6m. Гироскоп представляет два. чувствительных элемента 5 и 9, которые с помощью торсионов (упругих подвесов) 3, 11 смонтированы в раме 2, которая в свою очередь, с помощью торсионов 1 скреплена с корпусом прибора. Чувствительные элементы с помощью электростатических виброприводов 4 (левого), 7 (центрального) и 10 (правого), имеющих «гребенчатую» структуру, создающих вынуждающие силы F, приводятся в колебательные противофазные движения в своей плоскости {XZ). При наличии переносной угловой скорости Ωz возникают ускорения Кориолиса и соответствующие им силы инерции, которые вызывают либо вибрационные поступательные движения чувствительных масс в направлении оси OY, либо колебательное движение рамы 2 вокруг оси OZ в зависимости
от варианта исполнения упругих подвесов. Указанные колебания содержат информацию об измеряемой угловой скорости Ωz и измеряются с помощью емкостных датчиков перемещений, образованных подвижными электродами, расположенными на чувствительных массах 5, 9 и неподвижными электродами 6, 8, расположенными на корпусе ММГ.
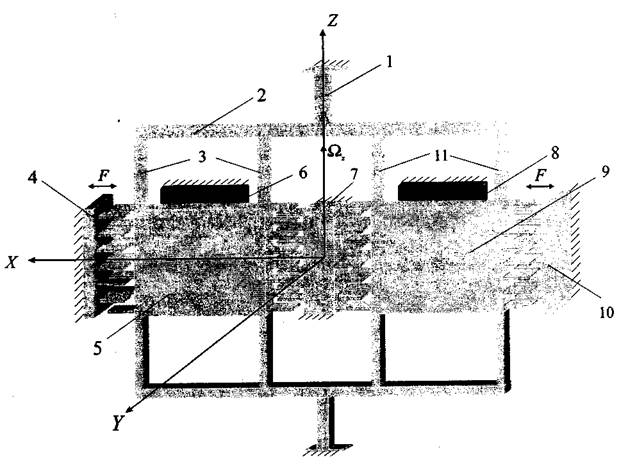
Рис. 6.17. Кинематическая схема камертонного ММГ:
1, 3, 11 —упругие подвесы (торсионы); 2 —рама;
4t 7, 10 — виброприводы; 5, 9 — чувствительные элементы;
6,8 — неподвижные электроды датчиков перемещений.
Колебательное движение чувствительных масс приводит к изменению зазоров между электродами и, следовательно, к изменению их емкостей, которые могут быть включены в мостовую измерительную схему.
Существуют схемы ММГ, имеющие одну чувствительную массу. На рис. 6.18 приведен общий вид структуры такого ММГ [119], в котором чувствительная масса смонтирована в корпусе на упругом подвесе, образованном системой торсионов 1,2. Вынужденное движение массы со скоростью v обеспечивается гребенчатыми структурами электростатических приводов и конечной жесткостью торсионов 2 в направлении оси X. Привода образованы пальцами, закрепленными на чувствительном элементе и стержневыми структурами, закрепленными в точках 3 на корпусе прибора. Движение чувствительного элемента (ЧЭ) под действием сил Кориолиса, возникающих при наличии измеряемой угловой скорости Ωz, обеспечивается за счет конечной жесткости торсионов 1 в направлении оси Y.
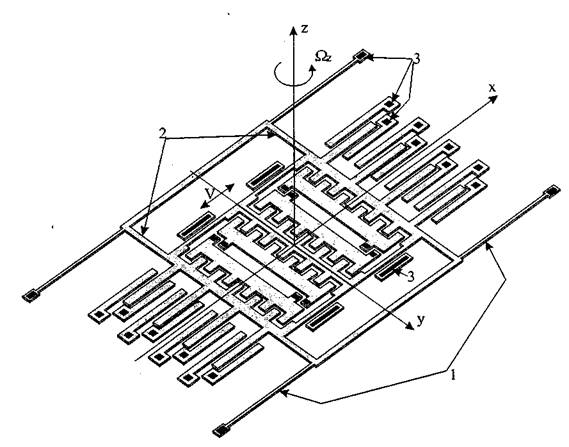
Рис. 6.18. Общий вид структуры ММГ с одной чувствительной массой: 1,2 — торсионы подвеса; 3 — «точки» крепления элементов гироскопа к корпусу.
Измерение перемещений ЧЭ обеспечивается преобразователями электростатического (емкостного) типа, которые также образованы «гребенчатыми» структурами.
6.2.1. Уравнения движения
Уравнения движения составим применительно к схеме гироскопа рис. 6.17, как общий случай по отношению к схеме ММГ по рис. 6.18.
При выводе уравнений движения будем полагать, что рама 2 совместно с торсионами 1 имеет конечную жесткость в направление осей OX, OY, а торсионы 1 имеют также конечную жесткость на кручение вокруг оси OZ. Торсионы 3 и 11 имеют в общем случае разные жесткости на изгиб в направление осей ОХ и OY. Считаем, что жесткости всех элементов вокруг OZ бесконечно большие, чувствительные массы и рамы имеют статическую несбалансированность, а основание перемещается поступательно с линейным ускорением. Введем следующие системы координат и обозначения (рис. 6.19). С корпусом связана система OXYZ. Корпус жестко связан с основанием, которое поступательно перемещается с ускорением, имеющим на оси системы координат OXYZ проекции ах, а, az. Основание, кроме того, вращается вокруг осей системы координат OXYZ с угловыми скоростями Ωx, Ωy,, Ωz. Вектор измеряемой скорости Qz направлен вдоль оси OZ, совпадающей с осью кручения торсинов 1 (рис. 6.19а). Система координат Ox/y/z/ обозначает разворот рамы на угол а за счет конечной жесткости торсинов 1 на кручение. С геометрическим центром рамы связана система координат Op xp yp zp, соответствующие оси которой параллельны осям системы
координат Ox’y’z’/. Положение геометрического центра рамы (т. Ор) определено координатами х, у в системе OXYZ, которые обусловлены конечной жесткостью на изгиб элементов рамы и торсинов 1. С центром масс (т. Ор ') рамы связана система координат O'px'py'pz'p, оси которой параллельны соответствующим осям системы координат Op xp yp zp а положение т. Ор ' определено координатами δхр, δyр, δzр, которые могут иметь физическую природу технологических или температурных смещений. С геометрическим центром (т. О1) первой чувствительной массы связана система координат O1x1y1z1, положение которого в системе Op xp yp zp определено координатами х1,у1, а соответствующие оси указанных систем координат параллельны (рис. 6.196). Координата х1обусловлена упругими свойствами конструкции, а также перемещениями, вызванными виброприводами, а координата у1 — только упругими свойствами ММГ. С центром масс (т. О1’), положение которого в системе O1x1y1z1 определено координатами δхр, δyр, δzр, связана система координат O1x1y1z1. Соответствующие оси систем координат O1x1y1z1 и O1x1y1z1 параллельны.
С геометрическим центром (т.02) второго чувствительного элемента связана система координат O2 x2y2z2, оси которой параллельны соответствующим осям системы Op xp yp zp, а положение т. О2 определено координатами х2 («упругие» и виброперемещения) и у2 («упругие» перемещения). По принципу работы ММГ координаты х1, х2 и у1, у2 находятся в противофазе. Этим обстоятельством и объясняется взаимное положение систем координат O1x1y1z1 и 02 x2y2z2 относительно системы Op xp yp zp. Положение центра масс (т. O2 ‘) второго чувствительного элемента в системе O2 x2y2z2 определено координатами δх2, δу2,
δz2, а оси системы O2‘ x2’ y2‘ z2’ параллельны соответствующим осям системы координат O2x2y2z2.
Смещения центров масс (т. т. O2’ O2’) oтносительно геометрических центров (т. т. 01 и 02) чувствительных элементов могут быть вызваны изменением температуры или технологическими причинами.
Уравнения движения ММГ получим на основании уравнений Лагранжа второго рода. В качестве обобщенных координат для рамы выберем угловую а и линейные х, у; для первого и второго чувствительного элемента соответственно х1, у1 и х2, у2.
Запишем выражение для кинетической энергии ММГ:
|

(6.102)
где: Аp, Вp, Сp — главные моменты инерции рамы относительно осей Охр, Оур, Ozp соответственно;
А1, В1, С1; А2, В2, С2 — главные моменты инерции чувствительных элементов относительно осей Охр, Оур, Ozp соответственно;
Тp,т1,т2 — массы рамы, первого и второго чувствительных элементов;
p,q,r — проекции абсолютных угловых скоростей на оси Охр, Оур, Ozp соответственно;
vxp, vyp, vzp; vx1, vy1, vz1, vx2, vy2, vz2 - проекции линейных скоростей центров масс рамы, первого и второго чувствительных элементов на соответствующие оси.
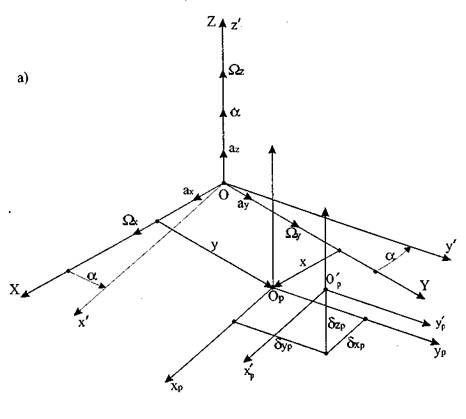
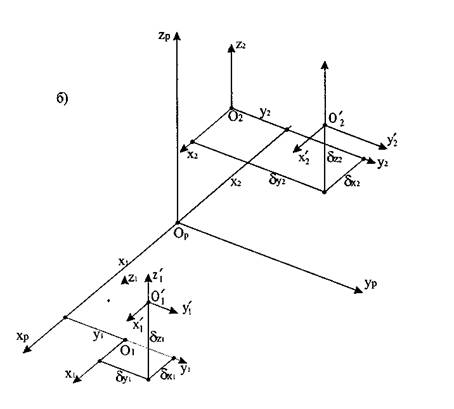
Рис.6.19. Системы координат: а — для рамы; б — для чувствительных масс
Будем полагать, что жесткость рамы по' соответствующим обобщенным координатам определяется величинами Gα, Gx, Gy, а жесткости подвесов чувствительных элементов величинами Gx1 Gy1 и Gx2, Gy2 по соответствующим обобщенным координатам.
Потенциальная энергия ММГ определяется упругими деформациями элементов подвеса и зарядом Q, накапливающимся на конденсаторах емкостью С гребенчатых структур
|
|

(6.103)
Диссипативную функцию рассеяния энергии ММГ представим в виде:
|

(6.104)
где: bα, bх, by — коэффициенты «вязкого» трения для рамы при ее движениях по обобщенным координатам а, х, у;
bх1 byl; bx2, by2 — коэффициенты «вязкого» трения для первого и второго чувствительных элементов при их движениях в направлении соответствующих обобщенных координат.
Запишем уравнения Лагранжа 2-го рода:
|
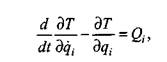
(6.105)
где для рамы i = α,х, у (qa = α,qx= x, qy = у);
для чувствительных элементов i = х1 ,у1 (qx1 =x1, qy1 =у1)
![]()
Определим обобщенные силы.
|
Для первого и второго ЧЭ: |
Для рамы: |
(6.106)
где для малых значений углов α (рис. 6.19)
|
(6.107)
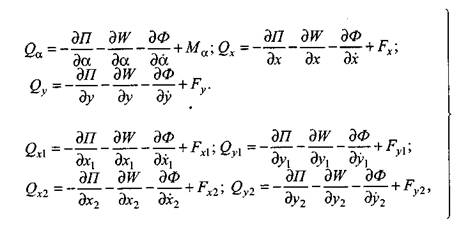
Запишем обобщенные силы (6.106) с учетом функций (6.103), (6.104):
|
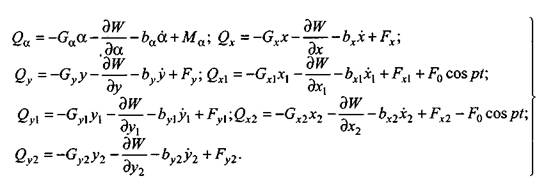
(6.108)
Запишем проекции абсолютной угловой скорости на оси ХрУpZp:
![]() (6.109)
(6.109)
С учетом того, что проекции абсолютных угловых скоростей чувствительных элементов на оси систем координат O1’x1’y1’z1’ и O2’x2’y2’z2’ также определяются выражениями (6.109), запишем матрицы для вычисления линейных скоростей центров масс рамы и чувствительных элементов относительно т. О (рис. 6.19):
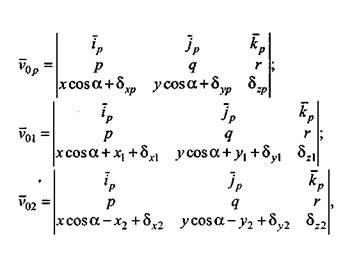
где: ip’ , jр’ , kр’ — единичные векторы в направлении осей ХрУрZр соответственно. Из матриц следуют выражения:
|
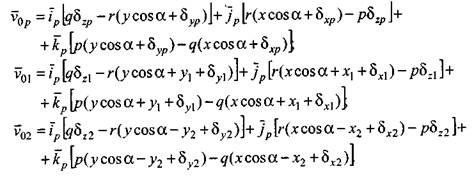
(6.110)
(6.1 (6.113) |
Запишем проекции абсолютных линейных скоростей центров масс рамы, первого и второго чувствительных элементов с учетом (6.110) на соответствующие оси:
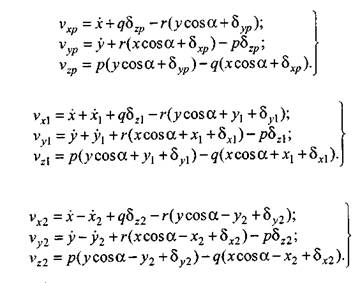
Полагая угол α малым (sin α ≈ α, cos α ≈ 1), перепишем выражения (6.1, (6.113) с учетом (6.109):
|
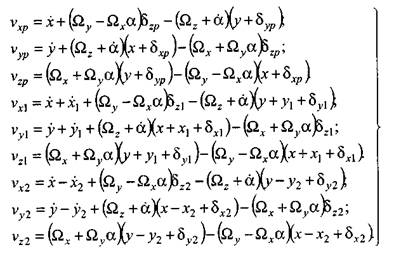
(6.114)
Вычислим следующие производные (Ωx= const, Ωy = cons/, Ωz = const):
|
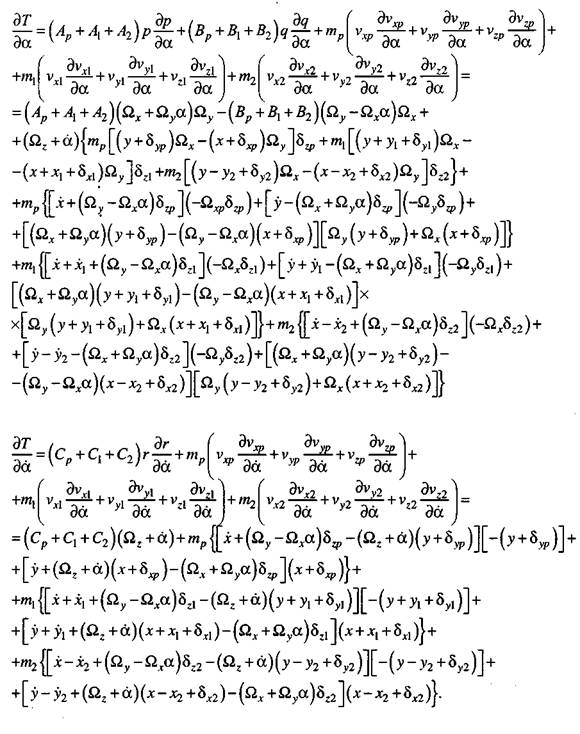
(6.115) |
|
(6.116)
где:
|
(6.117)
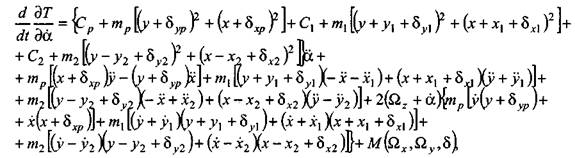
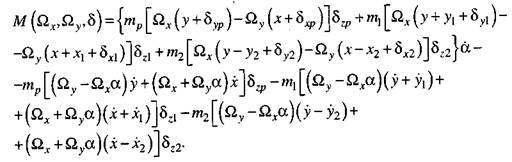
Таким образом, полное уравнение, описывающее движение ММГ по координате α, в соответствии с (6.105) имеет вид:
|
где производные соответствуют (6.116), (6.115), а обобщенная сила вычислена в (6.108).
Если предположить, что малы смещения 8 (с любым индексом) и угловые скорости Ωx, Ωy (Ωx<<Ωz , Ωy<<Ωx), то можно в выражениях (6.115), (6.116), (6.17) пренебречь величинами порядка их произведений (в любых сочетаниях). В этом случае дТ/дα≈0, M(Ωx, Ωy, δ)=0 и уравнение движения ММГ по координате α принимает вид:
|
(6.118)
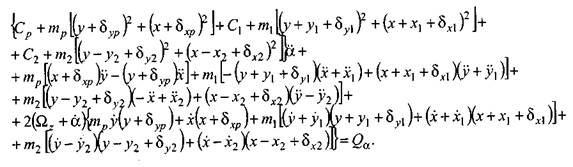
Получим уравнение движения ММГ по координате х. Вычислим производные:
|
В результате вычислений и в соответствии с общей формой
|
получим уравнение:
|
(6.119)
где Qx определяется в соответствии с (6.108).
Уравнение (6.119) описывает движение ММГ по координате х без допущений о малости угловых скоростей Ωx, Ωy по сравнению с измеряемой Ωz. В предположении малости угловых скоростей Ωx<<Ωz и Ωy<<Ωz и величин δ (с любыми индексами), если пренебречь слагаемыми порядка их произведений и выше, уравнение (6.119) принимает вид:
|

(6.120)
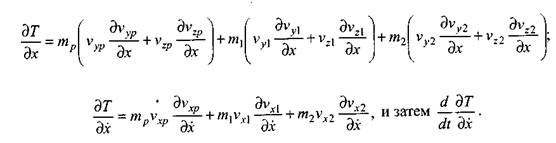
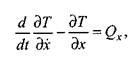
Поступая аналогичным образом, т. е. вычислив производные дТ/ду, дТ/д , d/dt(дT/д
, d/dt(дT/д ), и выполнив преобразования в соответствии с уравнением
), и выполнив преобразования в соответствии с уравнением
|
получим уравнение движения ММГ по координате у:
|
(6.121)
где Qy определяется в соответствии с (6.108).
Для малых значений величин Ωx, Ωy, δ аналогично (6.120) получим уравнение:
|

(6.122)
Получим уравнения движения для чувствительных элементов. Для первого чувствительного элемента (масса т,) вычислим производные:
|
В соответствие с уравнениями:
получим:
|
(6.123)
(6.124)
где Qx1, Qy1 определяются в соответствии с (6.108).
Для малых значений величин Ωx, Ωy, δ из (6.123), (6.124) получим:
|

(6.125)
Аналогично уравнениям (6.123), (6.124) получим для второго чувствительного элемента (масса т2):
|
(6.126) |
(6.127) |
где Qx2, Qy2 определяются в соответствии с (6.108).
Для малых значений величин Ωx, Ωy, δ из (6.126), (6.127) следуют уравнения:
|

(6.128)
Очевидно, что система уравнений (6.118), (6.120), (6.122), (6.125), (6.128) описывает движение ММГ не только для малых значений величин Ωx, Ωy, δ, но и для значений: Ωx= Ωy= 0, δ — не малое.
Запишем, используя (6.116), (6.117), (6.119), (6.121), (6.123), (6.124), систему уравнений движения ММГ для случая 8 = 0 (отсутствуют любые смещения центров масс рамы и чувствительных элементов):
|
(6.129)
(6.130)
(6.131)
 (6.132)
(6.132)
|
(6.1
(6.135)
Система уравнений (6.129)÷(6.135) описывает динамику камертонных ММГ при несимметрии массо-инерционных и упругих характеристик их элементов при измерении угловой скорости Ωz основания, которое, кроме того, перемещается с постоянным ускорением и вращается со скоростями Ωx, Ωy относительно перекрестных осей.
В применении к ММГ и к камертонному гироскопу, в частности, рассматривают два рабочих режима: движения и чувствительности. Режим движения — это принудительное, колебательное движение чувствительных элементов (масс), осуществляемое электростатическим приводом. На рис. 6.17 и 6.18 это движение осуществляется в направлении оси X. Режим чувствительности — это информативное движение по соответствующей координате (на рис.6.17 это движение по координате α , или в направлении оси Y, а на рис. 6.18 — в направлении оси Y), возникающее под действием сил Кориолиса при появлении измеряемой переносной скорости основания.
|
|
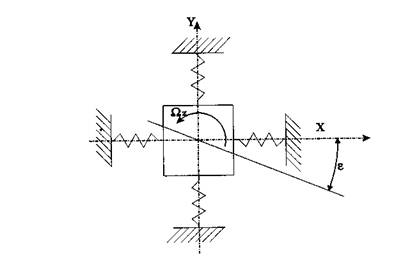
Рис. 6.20. К пояснению возникновения квадратурной ошибки |
При проектировании ММГ с информативным движением ЧЭ по координате у (линейное движение) весьма критичной является точность направления колебаний вынужденного движения вдоль оси х. На рис.6.20 показана упрощенная схема подвеса ЧЭ в виде пружин. Предположим, что вынужденные колебания x0sin pt происходят не вдоль оси х, а под некоторым малым углом ε (cosε ≈ 1, sinε ≈ ε). При измерении угловой скорости Ωz вдоль оси у действует ускорение Кориолиса
Одновременно вдоль этой же оси действует составляющая ускорения вынужденных колебаний ЧЭ:
![]()
Это ускорение будет измеряться также как и ускорение Кориолиса и, очевидно, является ошибкой ММГ. Эта ошибка называется квадратурной, т. к. существует сдвиг фаз на 90° по отношению к ускорению Кориолиса.
Запишем отношение амплитуд:
|
Из приведенного отношения следует, что при одинаковом порядке величин ускорений точность направления вынужденных колебаний должна быть очень высокой. Например,
при Ωz =0,05 рад/с, p = 105 рад/с и акв/ак = 1, значение ε = 10-6рад.
6.2.2. Электростатические силы
Определение электростатических сил в ММГ имеет принципиальное значение, т. к. они соизмеримы с силами упругости подвеса и, кроме того, оказывают существенное влияние на демпфирующие свойства системы. Потенциальная энергия заряда Q, накапливающаяся на конденсаторе емкостью С(х, у,z), к которому приложено напряжение U, определяется равенствами:
|
(6.136)
Вычисляя частные производные от выражения (6.136) для потенциальной энергии, можно получить консервативные электростатические силы:
|
(6.137)
Предположим, что в соответствии с рис.6.18, измеряется угловая скорость Ωz. В этом случае переменными являются координаты х, у (рис.6.21) и емкость между пластинами конденсатора равна:
|

(6.138)
где: с, а — размеры, определяющие начальную площадь перекрытия пластин; ∆Х, ∆y— малые перемещения в направлении соответствующих координат;
∆у0 — начальный зазор между пластинами.
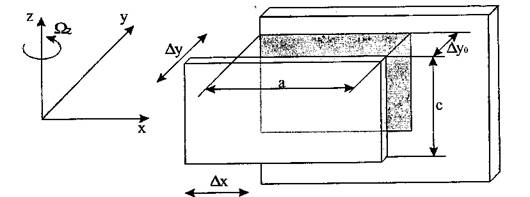
Рис.6.21. К вычислению емкости конденсатора
В соответствии с (6.136) и (6.137) получим (для воздуха и азота ε ≈ 1):
|
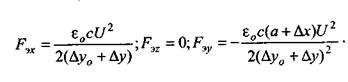
(6.139)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
