
 |
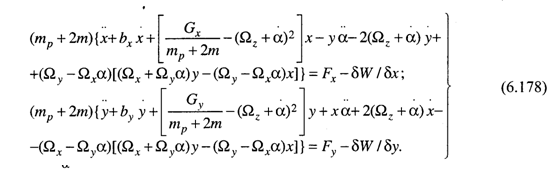
В соответствии с (6.167) запишем выражения для токов в левой и правой ветвях схемы обеспечивающих гармоническое движение ЧЭ:
где: Х0,ωх — амплитуда и частота ЧЭ в режиме движения;
![]() — изменение емкости гребенчатых структур.
— изменение емкости гребенчатых структур.
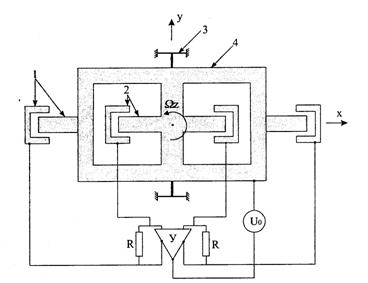 |
Рис. 6.29 Функциональная схема для режима движения:
1,2 — внешняя и внутренняя гребенчатые структуры;3 —упругий подвес;
4— ЧЭ; У — усилитель ;Я—резистор.
 На выходе усилителя:
На выходе усилителя:
где
![]() В соответствии с (6.143) и с учетом (6.169) получим выражение для силы, обеспечивающей ЧЭ режим движения:
В соответствии с (6.143) и с учетом (6.169) получим выражение для силы, обеспечивающей ЧЭ режим движения:
Важно отметить, что обеспечивается резонансный режим движения, т. к. сила и скорость находятся в фазе. Существенно также обстоятельство, что сила демпфирования и
электростатическая сила (6.170) пропорциональны скорости движения ЧЭ. Следовательно, если усиление в схеме (рис.6.29) недостаточно, то доминирует сила демпфирования и колебания ЧЭ постепенно затухнут. Если же усиление велико, то колебания будут возрастать до тех пор, пока не будут ограничены нелинейностью упругого подвеса. Коэффициент усиления (мощности) в схеме (рис.6.29) определяется величиной R, которую можно найти из условия баланса сил электростатических и демпфирования. Приравняем модули этих сил:
где bх— абсолютный коэффициент демпфирования
 |
Запишем известное соотношение: bх/т= ξ,хωх и, имея в виду выражение для добротности по затуханию (5.57) Qx = 1/2ξ,х, получим величину bх = (mωх)/Qx, после подстановки которой в формулу (6.171) получим коэффициент «усиления»:
где: δхCi/ax — изменение емкости на i-ом «пальце» гребенчатой структуры;
п — число пальцев.
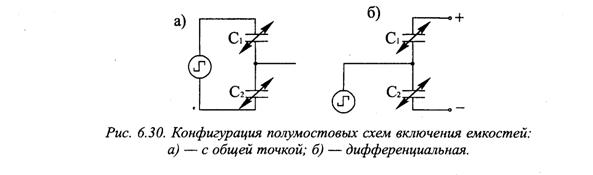
В качестве датчиков перемещений, фиксирующих движение ЧЭ в режиме чувствительности, в описанных схемах ММГ использованы конденсаторы. Варианты включения двух конденсаторов показаны на рис.6.30
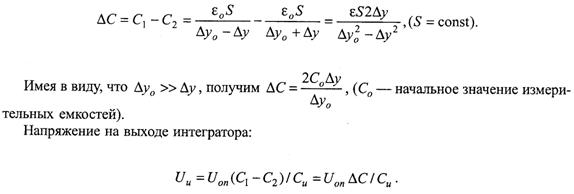
Очевидно, что ввиду малых значений емкостей конденсаторов в ММГ, критическое значение имеют различные паразитные емкости, образованные линиями связи, металлизированными поверхностями корпуса и т. д. В качестве одного из возможных вариантов на рис.6.31 приведена схема включения полумоста с интегратором в качестве усилителя зарядов конденсаторов.
Поскольку усилитель, обеспечивающий режим движения, и интегратор объединены в систему через движущиеся гребенчатые структуры гироскопа, имеется электронная связь между ними, которая приводит к появлению дополнительного сигнала на выходе интегратора.
Рассмотрим формирование этого дополнительного сигнала. В режиме движения на выходе усилителя формируется напряжение (6.168). Емкости взаимодействующих пальцев «гребенок» определяются зависимостями:
(6.173)
где С0 — емкость в нейтральном положении ЧЭ.
С учетом (6.168),(6.173) запишем величину заряда, накапливающуюся на интеграторе:
(6.174)
Таким образом, наряду с постоянной составляющей заряда, которая может быть отведена, существует составляющая на двойной частоте резонансного режима движения, которая на выходе интегратора формирует дополнительный сигнал:
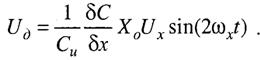
(6.175)
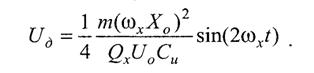 |
Подставим в выражение (6.175) величину Ux (6.169) с учетом (6.172) и получим остаточный сигнал на двойной частоте режима движения при равенстве сил электростатических и демпфирования:
(6.176)
Итоговой процедурой электроники ММГ является извлечение информации об измеряемой угловой скорости. Электроника ММГ включает усилитель, формирующий синусоидальное питание цепей гироскопа и интегратор, концентрирующий всю информацию о движениях гироскопа в виде зарядов, накапливающихся в конденсаторах гребенчатых струк
тур. Частота выходного сигнала усилителя достаточно стабильна и мало зависит от температуры, а амплитуда контролируется системой автоматики и также относительно постоянна. Спектр частот узкий и его пик близок к резонансной частоте конструкции.
Уже отмечалось, что существует взаимосвязь между усилителем и интегратором, следствием чего является появление сигнала на двойной резонансной частоте (йх. Движение гироскопа в режиме чувствительности есть следствие ускорения Кориолиса, которое представляет амплитудно модулированный сигнал. Кроме того, необходимо вспомнить о квадратурной составляющей выходного сигнала.
Таким образом, амплитуду и фазу колебаний гироскопа в режиме движения можно «извлечь» из выходного сигнала усилителя. С выхода интегратора можно «извлечь» информацию об ускорении Кориолиса, т. е. об измеряемой угловой скорости и квадратурной ошибке. Извлечение полезного сигнала — это измерение амплитуды сигналов на различных частотах. Эта задача аналогична той, которая имеет место в линиях связи, где также «извлекаются» сигналы, сосредоточенные на различных частотах текущего тока.
Наиболее приемлемым для ММГ методом извлечения полезной информации является синхронная демодуляция, основная сложность (особенность) которой заключается в том, что требуется постоянный по амплитуде сигнал, который имеет ту же частоту и фазу, что и нужный (выделяемый) сигнал. В ММГ это условие можно обеспечить режимами настройки, т. е. конструктивными мерами.
Для пояснения метода предположим, что имеется сигнал
который смешивается (умножается) с эталонным сигналом единичной амплитуды и частотой ωx
 Если т. е. появляется постоянная
Если т. е. появляется постоянная
составляющая сигнала, которая (амплитуда) может быть выделена низкочастотным фильтром.
При измерении угловой скорости Ωz(t) имеют место колебания ЧЭ гироскопа в режиме чувствительности с частотой ωу, т. е. выходной сигнал ММГ может быть представлен в виде:
где: Ωz(t) = f(ωy);ωx,,ωy —частоты режимов движения и чувствительности.
 |
Если этот сигнал смешать с учетверенным эталонным сигналом, то получим:
С помощью низкочастотного фильтра может быть выделена амплитуда Ωz(t), содержащая измеряемую величину Ωz . Особеность электронных схем смесителей заключается в том, что входной синусоидальный сигнал умножается на эталонный сигнал, формируемый цифровой схемой в виде последовательности прямоугольных импульсов известной частоты.
6.2.7. Динамика гироскопов
Динамика гироскопов определяется параметрами движения ЧЭ в режимах движения и чувствительности для заданных режимов динамической настройки. Наличие развитого программного обеспечения для ЭВМ делает доступным численное исследовние любой из полученных в п. 6.2.1 систем уравнений.
Очевидно также, что и исследование на ЭВМ предполагает разумное упрощение математических моделей, имея в виду целый ряд допущений математического и физического характера, которые изначально делают исходную математическую модель любой «полноты» — приближенной.
 |
Выполним последовательное упрощение математических моделей на примере систем уравнений (6.129)-(6.135). Примем следующие допущения, имея в виду точность технологических процессов изготовления ММГ:
 |
и получим систему уравнении:
 |
Для ММГ на рис.6.17 режим чувствительности — это движение по углу а.
 |
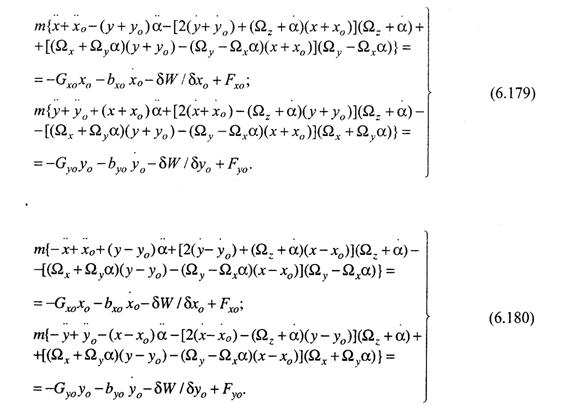
Будем полагать, что упругие подвесы чувствительных элементов (масс) допускают их движение только в направлении оси X, т. е. х, = х2 = х0; у{ = у2 = 0. Система уравнений (6.178) остается без изменений, а уравнение (6.177) и системы (6.179), (6.180) принимают вид:
В системе уравнений (6.182) верхние знаки соответствуют левому ЧЭ (рис.6.18), а нижние — правому. Далее можно предположить, что соответствующим выбором размеров рамки и торсиона, работающего на кручение, обеспечиваются равенства х = у = О. В таком случае система уравнений (6.178) обнуляется, а уравнения (6.181, 6.182) принимают вид

Третье уравнение является избыточным, т. к. неизвестных величин — две, и иллюстрирует наличие по оси Y кроме внешнего, центростремительного и Кориолисова ускорений.
В ММГ по рис.6.17 движение по координате ά не изменяет зазора между пластинами «гребенок» приводов. В режиме движения по координате X происходит изменение площадей взаимного перекрытия пластин, но возникающие силы электростатического тяжения между ними направлены вдоль оси Z. Таким образом, взаимодействие между пластинами «гребенок» приводов не приводит к возникновению момента сил вокруг оси Z.
Пусть расстояние от оси Z до центра масс ЧЭ х0 = l + ∆х (l — постоянный геометрический размер, ∆х — смещение за счет упругой деформации подвеса). При угловых колебаниях по координате а происходит изменение зазора ∆у0 между пластинами конденсаторов С1 и С2 съема информации (рис.6.32 и 6.17). Если площадь взаимного перекрытия пластин S не меняется, то в соответствии с (6.138) получим электростатические силы тяжения:
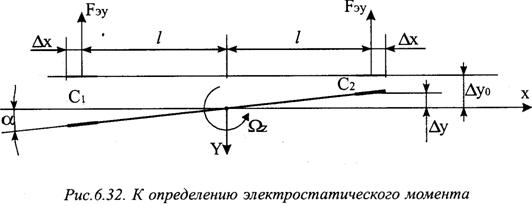 |
где: Uon — опорное напряжение на пластинах конденсаторов; знак «+» — для емкости С1, а знак «-» — для емкости С2.
Момент электростатических сил:
 |
 |
Имея в виду, что ∆у << ∆у0 и ∆у ≈ ( l+ ∆х)ά получим:
где Cs = (εoS)/∆y0 — емкость конденсаторов при ∆у = 0.
Полагая ширину «пальцев» гребенчатых структур приводов такой, чтобы при наличии угловых движений по координате ά изменение площадей взаимного перекрытия пластин
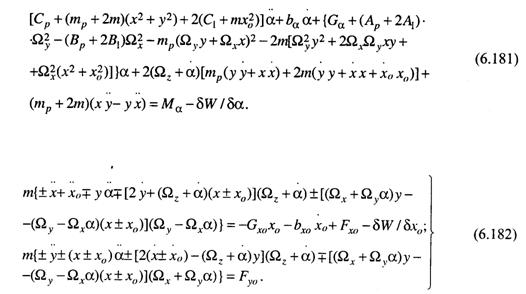
происходило только за счет координаты х0=l + ∆х, в соответствии с формулами (6.143) и (6.170) запишем:
где р = ωх для резонансного случая режима движения.
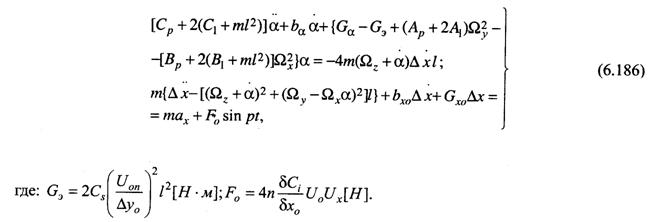
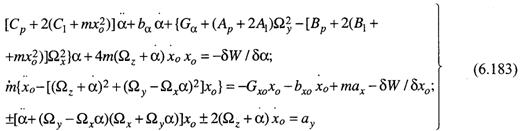
С учетом электростатических сил и, имея в виду, что х0 = l + ∆х и l>>∆x, запишем первые два уравнения системы (6.183):
Из первого уравнения системы.(6.186) следует, что момент, обусловленный ускорением Кориолиса, приводит к колебаниям гироскопа по координате ά. Электростатическая
«жесткость» Gэ уменьшает эффективную жесткость подвеса. Наличие перекрестных угловых скоростей Ωx,Ωy, нелинейным образом влияет на эффективную жесткость подвеса.
Из второго уравнения системы (6.186) следует, что скорости Ωx,Ωy, Ωz создают центробежные ускорения и соответствующие им силы инерции.
Выполним приближенное аналитическое исследование уравнений системы (6.186) имея
в виду, что угол ά — малая величина и Ωz >>Ωx,Ωy. При таких условиях имеет место
 |
приближенное равенство: (Ωz +ά)2 +(Ωy -Ωxά)2 ≈ Ω2z+Ω2y + (2Ωz +ά)ά и система (6.186) принимает вид:
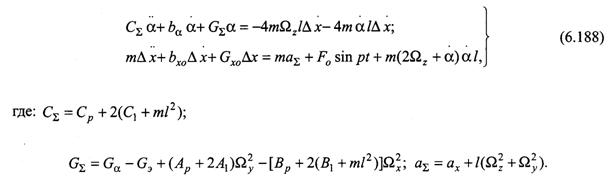
Последнее слагаемое в правой части первого уравнения можно рассматривать как погрешность, вносимую в измерение угловой скорости Ωz относительной скоростью вращения рамки ά. Последнее слагаемое в правой части второго уравнения является инерционной силой, также обусловленной угловой скоростью ά, которая несколько искажает режим движения. Можно предположить, что влияние этих составляющих можно минимизировать соответствующим подбором параметров гироскопа и режимов его настройки. В любом случае можно вначале решить уравнения системы (6.188) без учета этих слагаемых, а затем выполнить оценку их влияния. Пойдем по этому пути и, в таком случае, второе уравнение становится независимым от первого и может быть записано в форме:
Имея в виду затухание собственных колебаний гироскопа, а также подбор параметров электроники и привода, обеспечивающих нейтрализацию сил демпфирования в режиме движения (см. ф.6.171), можно ограничиться частным решением:
В соответствии с решением (6.192) ЧЭ (массы) в режиме движения совершают гармонические колебания относительно положения равновесия Е1 со сдвигом по фазе γ по отношению к колебаниям, генерируемым источником переменного напряжения Ux (см. ф.6.168).

Аналогично уравнению (6.189) и при тех же допущениях перепишем первое уравнение системы (6.188) с учетом (6.192):
 |
Имея в виду затухание собственных колебаний, запишем частное решение уравнения (6.193):Т. к. произведение ά ∆х, в первом уравнении системы (6.188) приводит к появлению возмущающего момента на двойной частоте p, то соответствующая ему составляющая сигнала по углу ά может быть отфильтрована средствами электроники и, следовательно, решение (6.194) может быть вполне приемлемым для практических расчетов.
 |
Имея в виду малый порядок величин ζх,ζά, запишем приближенное выражение:
Из выражения (6.195) следует, что амплитуда колебаний гироскопа по углу а (режим чувствительности) зависит от режима настройки (см. п.6.2.5).Например, для случая равенства резонансных частот режимов движения и чувствительности (см. рис.6.26) (ωх0 = ωάо необходимо выполнение условия:
Механический коэффициент усиления определим из выражения (6.195):
 |
Положим (ωхо =εр (ε — расстройка режима движения), (ωхо =ωάо и из (6.197) получим:
На рис.6.33 а) приведен график зависимости (6.198), из которого следует, что коэффициент Кмy может быть очень велик. На рис. 6.33 б) приведен график зависимости (6.199)
для ε = 0,9, который также иллюстрирует чрезвычайно высокое значение коэффициента усиления при резонансе режимов движения и чувствительности и, кроме того, изменение
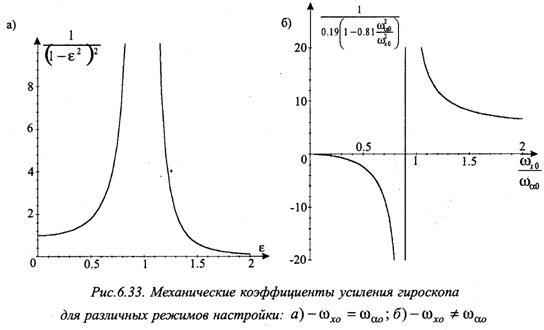 |
фазы выходного сигнала при ωхо > ωάо
Получим коэффициент передачи измерительной цепи гироскопа. Воспользуемся приближенным выражением (6.195) и для модуля выходного сигнала, которым на этом этапе
измерения угловой скорости Ωz является угол ά, получим:
Из рис.6.32 следует геометрический коэффициент передачи:
Если принять, что конденсаторы С1 , С2 включены в мостовую схему, например аналогично рис.3.6, то используя формулу (3.18) получим: ∆U/∆y=Uоп/2∆y0
С выхода электронной схемы с коэффициентом усиления Ky будет получено выходное
напряжение Uвых = Ку ∆U.
Объединим приведенные зависимости и получим коэффициент передачи (крутизну характеристики) гироскопа:
Очевидно, что крутизна характеристики нелинейным образом зависит от режима настройки гироскопа (рис.6.33).
 |
Рассмотрим теперь схему ММГ по рис. 1.26, в котором режим чувствительности — это поступательное движение ЧЭ (масс) перпендикулярно плоскости, в которой осуществляется режим движения, ά перемещение по координате ά отсутствует (ά = 0). Для рассматриваемого случая уравнение (6.177) принимает вид:
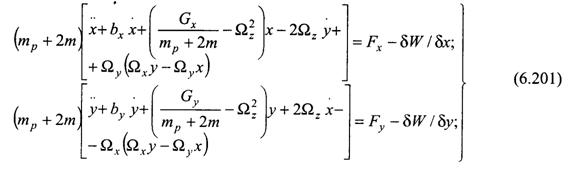 |
Данное уравнение может быть использовано для вычисления динамических реакций в связях, осуществляющих крепление рамки с корпусом, при расчете их на прочность. Система уравнений (6.178) и объединенные системы (6.179),(6.180) принимают вид:
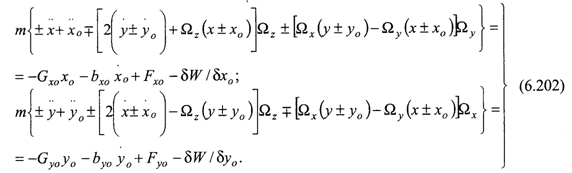 |
В системе уравнений (6.202) верхние знаки соответствуют левому, а нижние — правому ЧЭ (массам). Как уже отмечалось, наличие ЭВМ обеспечивает численное исследование предлагаемых математических моделей динамики ММГ, в частности, систем уравнений (6.201),(6.202). Понятно также, что аналитическое исследование даже упрощенных уравнений дает исследователю неоценимый смысловой материал. Выполним аналитическое исследование системы (6.202) полагая, что малые приращения х, у за счет упругости рамки значительно меньше текущих координат х0, у0 чувствительных элементов, либо рамка выполнена такой жесткости, что х = у = 0.
Имея в виду, что х0 = l + ∆х и l>> ∆х, а у0 = ∆у, запишем систему (6.202) в виде:
где F0 определяется формулой (6.187), а электростатическая сила притяжения пластин конденсаторов - в соответствии с (6.139) — Fэy ≈ (ε0SU2оп) /(2∆у20), ( ∆у0 — расстояние между
пластинами измерительных конденсаторов, ∆у0 >> ∆у )
Если, как и в предыдущем случае иметь в виду, что применение гироскопа предполагает
Ωz >> Ωx Ωy и, кроме того, считать, что привод обеспечивает выполнение условия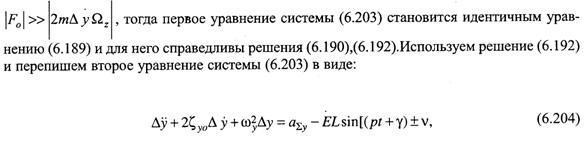
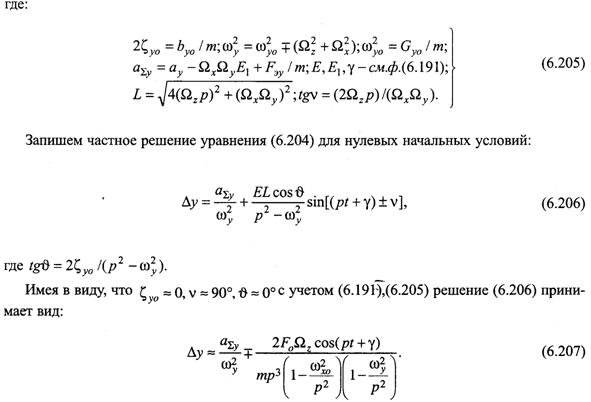 |
Очевидно, что гармоническая составляющая выражения (6.207) физически идентична
выражению (6.195). Формальное их совпадение можно получить, если положить СΣ = 2ml2 и ∆у = lά. Если далее полагать, что параметры гироскопа обеспечивают приближенное
равенство (ωу ≈ ωуо, тогда все сказанное о режимах настройки гироскопа предыдущей схемы может быть распространено и на рассматриваемую схему гироскопа. Из ф.(6.207) следует, что имеет место постоянное смещение ЧЭ, не завиящее от измеряемой угловой скорости, которое приведет к появлению ложного сигнала на выходе электронной схемы. Очевидно, что этот сигнал может быть отфильтрован от полезного сигнала.
Аналогично предыдущему, можно получить выражение для крутизны рабочей характеристики гироскопа:
где Кму определяется по ф.(6.199), в которой вместо величины ωάo нужно записать ωу
Уравнения системы (6.202) пригодны для схемы гироскопа по рис 6.19, имея в виду, что структура гироскопа расположена в плоскости XY. Для тех же условий, при которых записана система (6.203), первое уравнение этой системы, описывающее режим движения, остается без изменений и для рассматриваемой схемы ММГ. Электростатические силы для этой схемы подробно рассмотрены в п.6.2.2. Пусть выполнено условие, при котором компенсируется квадратичная ошибка. Воспользуемся матрицей коэффициентов жесткости (6.159) и второе уравнение системы (6.202) для режима чувствительности запишем в виде:

Уравнение (6.209) по форме идентично уравнению (6.204) и, следовательно, для него справедливо решение (6.207).
 |
Получим выражение для крутизны рабочей характеристики гироскопа, полагая что измерительные емкости включены по схеме рис.6.31 (паразитные емкости учитывать не будем). Измерительная цепь гироскопа включает следующую последовательность преобразований: Ωz→∆у→∆С→Uu→Uвых. Величина ∆у определяется из выражения (6.207).Определим изменение емкости:
Если имеется дополнительное усиление, то Uвых =Ky∙Uu. Таким образом, крутизна рабочей характеристики гироскопа определяется выражением:
где Коэффициент Кму вычисляется по зависимости (6.199), в которой величину ωάо нужно заменить величиной ωy из (6.211).
На примере уравнения (6.210) рассмотрим вопрос о полосе пропускания гироскопа, который излагался в п.6.2.5 при обсуждении режимов настройки (рис.6.26). Рассмотрим случай, когда Ωx и (или) Ωy = 0, что может быть оговорено в технических условиях на установку гироскопа. В соответствии с (6.205) ν = 90°. Если ωхо = εр и ε → 1, то даже при очень малом значении ζx значение tgγ → ∞ и γ ≈ 90°. Следовательно, sin(pt+180)=sin pt
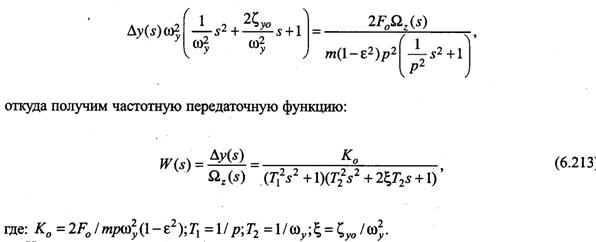
и, имея в виду, что L = 2 Ωzzp (см. ф.6.205) и s = d/dt (символический оператор дифференцирования), уравнение (6.210) запишем в операторной форме:
 |
Л |
1 , 2С |
уо |
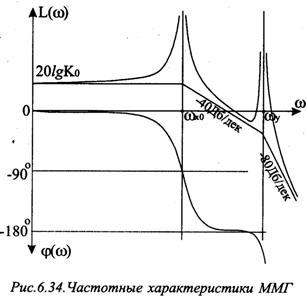 |
Нужно иметь в виду, что при наличии даже очень малого относительного коэффициента демпфирования ζx0≠0 консервативное звено 1/(T12s2+1) становится колебательным. Общий вид амплитудно - и фазочастотных характеристик, соответствующих (6.213), показан на рис. 6.34, из которых следует, что при ωх ≈ωу будет очень большой резонансный пик, означающий большой механический коэффициент усиления гироскопа, и имеет место фазовый сдвиг в 90°.
Но этот резонансный пик находится в узкой полосе частот, т. е. полоса пропускания частот измеряемой скорости Ωz при которой будет сохраняться большой коэффициент усиления, мала. Если ωxo < ωy полоса пропускания расширяется, но коэффициент усиления гироскопа будет небольшим.
Аналогично изложенному может быть выполнен анализ работы одномассовой схемы гироскопа по рис.6.25, используя уравнения (6.201),(6.202). Не проводя исследований, только по виду уравнений можно заключить, что в качественном отношении динамика гироскопа будет идентична предыдущему случаю. Более того, можно заключить, что полученные выше результаты можно с большим основанием применить именно к гироскопу с подвесом по рис.6.25, т. к. в нем устранено взаимное влияние торсионов, обеспечивающих режимы движения и чувствительности. При вычислении собственных частот колебаний ωxo, ωyo, ωzo, нужно руководствоваться материалами п.6.2.4.
6.2.8.Пример расчета параметров и характеристик гироскопа
Выполним расчет параметров и характеристик ММГ с одной чувствительной массой на основе приведенных зависимостей. Схема гироскопа с соблюдением масштаба относительных размеров ЧЭ и торсионов упругого подвеса приведена на рис.6.35.
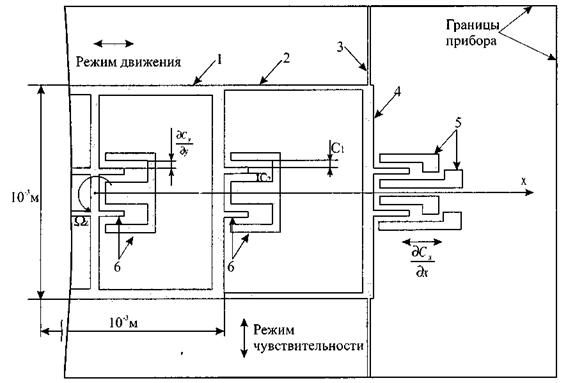
Рис.6.35. Расчетная схема гироскопа:
1 — стержневой ЧЭ; 2, 3 — торсионы; 4 — стержневой элемент;
5 — конденсаторы движения; 6 — конденсаторы чувствительности.
ЧЭ 1 выполнен в виде стержневой структуры, которая включает также восемь пальцев конденсаторов чувствительности 6. ЧЭ в режиме чувствительности перемещается в на
правлении оси У под действием кориолисовых сил на четырех торсионах 2 относительно жесткого элемента 4 и корпуса прибора. Вся стержневая структура, включая элементы 4, на четырех торсионах 3 в режиме движения перемещается в направлении оси X с помощью конденсаторов движения 5. В основу схемы положена структура ММГ по рис.6.19. Отличие между ними в том, что движение в режиме чувствительности в рассматриваемой схеме не изменяет зазоры между обкладками конденсаторов движения.
ММГ предназначен для измерения угловой скорости Ωz, диапазон изменения которой будет определен в процессе расчета. Поперечные угловые скорости и поступательные ускорения основания отсутствуют. ММГ изготовлен из кремния с параметрами:

Размеры всех стержневых элементов приняты одинаковыми: (10-3∙ 2 ∙10-2 ∙ 2 ∙ 10-5 )[ м],
также как и размеры пальцев конденсаторов чувствительности (23∙10-5 ∙2∙10-5 ∙2∙10-5) [м].
Размеры пальцев конденсаторов движения (0,5∙10-3∙2∙10-5 ∙2∙10-5)[м]. Зазор между пластинами конденсаторов ∆у0 =2∙10-6[м]. Амплитуда колебаний ЧЭ в режиме движения Х0 = 10-5 [м]. Частота генератора, обеспечивающего режим движения р = 105[рад/с]. Напряжение на конденсаторах движения Uon = 10В, а на конденсаторах чувствительности
U0 = 1В. Масса ЧЭ тч = 5 ∙10-9 кг. В режиме движения к массе ЧЭ добавляются массы
элементов 4, т. е. тд = 6,5 ∙ 10-9 кг.
1. Определим размеры торсионов, исходя из резонансных частот: режим движения
(ωxo = 0,9р = 0,9 ∙105 рад /I с; режим чувствительности ωyo = 1,1 ωxo.
В соответствии с результатами п.6.2.4 резонансная частота для режима движения
 , откуда жесткость одного торсиона в направлении оси X:
, откуда жесткость одного торсиона в направлении оси X:
Аналогично для режима чувствительности имеем |
Так как (см. ф.6.44) Gx3 = Е[110]bn (сn/l3)3 , то полагая для всех торсионов ширину bп= 2 ∙10-5 м , а толщину сп=10-5м, вычислим длину торсиона 3:

|

Вычислим длину одного торсиона 2:
|
Напомним, что схема на рис.6.35 выполнена с соблюдением относительных размеров стержневых элементов и торсионов.
2. Рассчитаем изменение емкости конденсаторов чувствительности при перемещении
ЧЭ ∆у в направлении оси У.
При отсутствии движения емкость каждого из конденсаторов чувствительности
(a= 21∙10-5 м, с = 2∙10-5 м, см. рис. 6.22):
|

Каждая гребенчатая структура конденсаторов чувствительности содержит четыре емкости (две емкости C1 и две - С2; см. рис.6.35). Все емкости С1 включены параллельно друг с другом (всего их -8). Емкости С2 также соединены между собой параллельно. Таким образом, при перемещении ЧЭ в направлении оси У происходит изменение емкости конденсаторов чувствительности:
|
Отношение ∆С/∆у = (16∙10-8)[Ф/м] будет использовано при вычислении крутизны рабочей характеристики гироскопа.
3. Рассчитаем уменьшение собственной частоты гироскопа для режима чувствительности за счет электростатического притяжения между пластинами конденсаторов чувствительности. Воспользуемся ф.(6.160) и получим:

т. е. начальная частота (ωyo = 0,95∙105 рад/с уменьшается на 2%.
4. Рассчитаем добротность гироскопа по демпфированию для режимов движения и чувствительности.
Вначале найдем абсолютный коэффициент демпфирования структуры гироскопа. Демпфирование осуществляется за счет вязкого трения газа, находящегося в зазорах между крышками корпуса и поверхностями подвижных элементов и за счет сжатия газа между торцами пальцев конденсаторов и элементами конструкции. Структура гироскопа содержит 7 стержневых элементов, 8 пальцев конденсаторов чувствительности и 4 пальца конденсаторов движения. Скольжение происходит с двух сторон структуры. Общая площадь скольжения:
![]()
Для давления газовой среды в корпусе р = 1Topp = 1,33 ∙102 Н/м2 найдем
![]()
Вычислим демпфирование за счет сжатия и последующего перетекания газа в торцах пальцев. Предположим, что минимальный зазор в районе торцев h=20∙10-6 м. Общая площадь всех десяти торцев S = 10(2 ∙10-5 ∙2 ∙10-5) = 40 ∙10-10 м2. По ф.(6.159) получим:
![]()
Вычислим 2ξх=bx/(mд ωyo) = 16,24∙10-11 /(6,5∙10-9 ∙0,9∙105) = 2,77 ∙10-7 и согласно ф.(5.57) получим добротность в режиме движения по затуханию: |
Объединим оба результата и получим абсолютный коэффициент демпфирования для режима движения:
![]()
![]()
Вычислим добротность по демпфированию в направлении оси У для режима чувствительности. Площадь поверхности двух сторон стержневых элементов ЧЭ и восьми пальцев конденсаторов чувствительности:
![]()
Получим b = 2,776∙10-6 ∙2,73∙10-7∙1,33∙102 ≈10-10 [кг/с]. В восьми зазорах между боковыми поверхностями пальцев общей площадью равной S = 8(23∙10-5 ∙ 2∙10-5) = 366∙10-10 м2,
происходит сжатие и последующее перетекание газа через зазоры h= ∆у2= 10-6 м. Получим коэффициенты демпфирования:
![]()
следовательно
![]()
Аналогично предыдущему вычислим:
![]()
и, следовательно,
![]()
5. Определим коэффициенты передач (усиления) гироскопа для различных режимов на
Положим ε = 0,95 и получим выражение для коэффициента передачи ЧЭ: |
стройки. Имея в виду, чтоX = X0sinpt и, следовательно, F0=m![]() = тХ0р2 , воспользуемся зависимосстью (6.207) и запишем величину амплитуды ЧЭ в режиме чувствительности:
= тХ0р2 , воспользуемся зависимосстью (6.207) и запишем величину амплитуды ЧЭ в режиме чувствительности:
Очевидно, максимальный коэффициент передачи будет при ωyo = 1,054 ∙ ωxo. Значения ∆у/Ωz для различных режимов настройки приведены в таблице:
ωyo / ωxo | 0,1 | 0,3 | 0,5 | 0,7 | 0,9 | 1,0 | 1,05 | 1,054 | 1,08 | 1,1 | 1,3 | 1,5 |
∆у∙10-8/Ωz [м/1/с] | 0,206 | 0,223 | 0,264 | 0,366 | 0,756 | 2,05 | 26,45 | 2329,54 | 75,09 | -2,3 | -0,29 | -0,164 |
Полученный результат ωyo = 1,08∙ωxo, которому соответствует достаточно большой коэффициент усиления и не изменяется фаза выходного сигнала, близок к рекомендуемому
режиму настройки ωyo = 1,1 ωxo. Режим настройки, при котором очень большой коэффициент усиления привлекателен, потому что возрастает чувствительность гироскопа, но при
этом очень узкая полоса пропускания измеряемой угловой скорости Ωz. При ωxo<<ωyo коэффициент усиления резко уменьшается, но полоса пропускания измеряемой скорости расширяется (см. п. 6.2.5 и рис.6.3.4). Большой коэффициент усиления может также привести к перемещениям ∆у, соизмеримым с зазором ∆у0, что недопустимо, т. к. будут проявляться нелинейности в электростатических структурах.
6. Рассчитаем крутизну рабочей характеристики ММГ полагая, что используется схема с интегратором. Полагая емкость Си = 10-12Ф, получим
![]()
Пусть обеспечивается коэффициент усиления Uвых /Uи = 10. Выберем режим настройки ωyo = ωxo, для которого ∆y/ Ωz =2,05∙10-8[м/1/с] и в соответствии с ф. (6.212) получим:

Определим максимальную скорость Ωz, при которой ∆у = 0,01∆у0 = 2∙10-8 м. Из отношения ∆у/ Ωz = 2 ∙10-8 / Ωz = 2,05 ∙10-8 находим Ωz(макс) =1 рад/с.
Аналогично могут быть рассчитаны ММГ с другими схемами подвеса чувствительных элементов.
Источники ошибок.
Источники ошибок гироскопов можно укрупненно разделить на две группы: имеющие механическую и электронную природу. К первой группе можно отнести: неперпендикулярность осей, вдоль которых осуществляются режимы движения и чувствительности; технологические погрешности изготовления, некоторые из которых учтены при составлении уравнений движения (6.129-6.135); коробление плоских структур и броуновский шум.
Как отмечалось, неперпендикулярность осей приводит к квадратичной ошибке, которую в выходном сигнале удается устранить методами электроники. Технологические погрешности изготовления торсионов (см. п.6.2.5) могут привести к изменению собственных частот, что повлечет к нарушению режимов настройки. К изменению собственных частот может привести и коробление плоских структур гироскопа. Отклонение геометрии торсионов от проектной, а также нарушение их пространственной ориентации может привести к появлению перекрестных связей между рабочими режимами вследствие возникновения перекрестных коэффициентов в матрицах жесткости торсионов. Броуновский Шум — это тепловой шум, происходящий от столкновения молекул газа с элементами гироскопа. Как было показано в п.6.2.3 длина пробега молекул газа может значительно превосходить размеры ММГ и, следовательно, такая «бомбардировка» является причиной ощутимого дрейфа гироскопа.
Вторая группа помех включает тепловые «шумы» усилителя, интегратора и поверхностных электрических цепей. Существенно, что все «шумы» имеют один порядок значимости. Правда шум усилителя меньше чем шум интегратора, т.к. емкости первого меньше чем у второго. Шумы электроники могут быть уменьшены применением более совершенных источников питания, емкостей, схем интеграторов. Далее возможны перекрестные связи между каналами электроники, обеспечивающими режимы движения и чувствительности. Так, между усилителем и интегратором существует электронная связь через гребенчатые емкостные структуры, которая на выходе электронной схемы приводит к появлению дополнительного сигнала (см. ф. 6.175). Наконец, как следует из выражений (6.194,6.204,6.210) выходной сигнал существенно зависит от фазовых задержек, для измерения которых должны быть предусмотрены соответствующие электронные схемы, которые сами являются источниками помех. В любом случае для устранения фазовых задержек необходимо, чтобы постоянная времени усилителя была значительно меньше постоянной времени режима движения. В заключение следует отметить, что существуют ошибки, вызванные особенностями (неидеальностью) прохождения сигналов по электронным цепям.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
