
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Из результатов (6.139) следует, что для рассматриваемого варианта движения пластин имеется составляющая электростатической силы вдоль оси х , которая не зависит от этой координаты. Составляющая вдоль оси z отсутствует, а составляющая вдоль оси у представляет нелинейную силу электростатического притяжения, которая зависит от перемещений по координатам х, у. Очевидно, что электростатическое притяжение между пластинами конденсаторов уменьшает жесткость торсионого подвеса чувствительной массы
При исследовании динамики ММГ с учетом перекрестных связей между движениями ЧЭ по координатам х, у может быть использована следующая матрица жесткостей, обусловленных электростатическими силами:
|
(6.140)
где:  ;
; ;
;
Определим электростатическое взаимодействие между «пальцами» гребенчатых
структур.
Зависимости, приведенные выше, без учета окружающих полей и, учитывая только противоположные поверхности перемещающихся относительно друг друга элементов «гребенок», могут быть применены для анализа электростатического взаимодействия гребенчатых структур ММГ. На рис.6.22 в соответствии со схемами рис.6.18 и 6.21 приведена простейшая схема ММГ с двумя одинарными гребенчатыми структурами, предназначенного для измерения угловой скорости Ωz.

Рис. 6.22. Схема ММГ с двумя одинарными гребенчатыми электростатическими структурами:
1 — ЧЭ (показан условно); 2 — упругий подвес; 3 — корпус; 4 — одинарная гребенчатая
структура; РД, РЧ — направления перемещений ЧЭ в режимах движения
и чувствительности соответственно
В корпусе 3 сформированы ЧЭ1, упругие подвесы 2 и гребенчатые структуры 4. Измеряемая угловая скорость Ωz и движение ЧЭ в направлении РД (режим движения) приводят к информативным движениям ЧЭ в направлении РЧ (режим чувствительности). Гребенчатые структуры находятся под напряжениями U1 и U2 и образованы пальцами (b, с — ширина и толщина пальца соответственно) и элементами гребенки. Начальный зазор между пальцами и элементами гребенки в направлении оси y-∆у0 . Линейный размер взаимного перекрытия пальца и элемента гребенки — а.
Имея в виду (6.136-6.139) запишем работу электростатических сил на возможных перемещениях ЧЭ ∆х в направлении оси х и ∆у в направлении оси у:
В равенствах (6.141) выражения перед возможными перемещениями определяют электростатические силы в направлении осей х и у.
Напряжения Ux и U2 могут иметь следующий вид:
|
где: U0, Ux — постоянная и изменяющаяся во времени составляющие напряжений. Равенства (6.141) принимают вид:
|
(6.142)
Если величина ∆у составляет единицы процентов от ∆у0, то выражение (6.142) упрощается:
|
и из него следует выражение электростатической силы в направлении оси х:
|

(6.143)
Матрица коэффициентов жесткости для рассматриваемого случая, вычисленная аналогично (6.140), имеет вид:
|
(6.144)
Для малых значений перемещений ∆у матрица (6.144) упрощается:
|
(6.145)
Из сравнения матриц (6.144), (6.145) и (6.140) следует, что электростатическая сила в направлении оси х в обоих случаях отсутствует ( кэхх ≈ 0 ), а жесткости в направлении оси у (кэyy ≠ 0) отрицательны и уменьшают механическую жесткость упругих подвесов.
 Нулевые диагональные коэффициенты матрицы (6.145) свидетельствуют об отсутствии электростатических сил, которые могли бы вызвать квадратурную составляющую выходного сигнала.
Нулевые диагональные коэффициенты матрицы (6.145) свидетельствуют об отсутствии электростатических сил, которые могли бы вызвать квадратурную составляющую выходного сигнала.
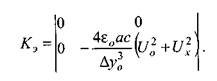
На рис 6.23 приведена схема ММГ с одинарными гребенчатыми электростатическими структурами, элементы которых включены в дифференциальные цепи с источниками напряжений U1 U3 и U2, U4. Предполагается, что как и в схеме по рис. 6.22 измеряется угловая скорость Ωz, а перемещения ЧЭ в режимах движения РД и чувствительности РЧ происходят соответственно в направлении осей х и у.
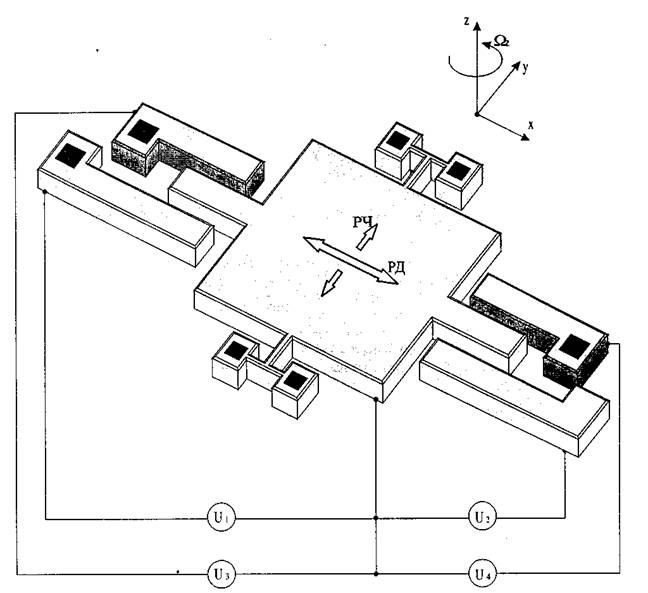
Рис.6.23. Схема ММГ с дифференциальным включением элементов электростатических гребенчатых структур
Работа электростатических сил на возможных перемещениях ∆х и ∆у аналогично предыдущему, может быть представлена следующими выражениями:
 |
Напряжения U1,U2,U3,U4 представляют следующую комбинацию напряжений [119]:
![]()
где Ux — переменная составляющая;
Uq — составляющая для компенсации квадратурной ошибки;
Uy — составляющая для устранения поперечного тяжения электродов.
Знаки составляющих напряжений определены исходя из их функционального назначения.
 |
С учетом (6.147) запишем следующие равенства:
 |
Работу электростатических сил (6.146) с учетом полученных равенств для случая Δy<<Δyo представить в упрощенном виде:
Запишем элементы матрицы жесткости, вычисляемые в соответствии с (6.146):
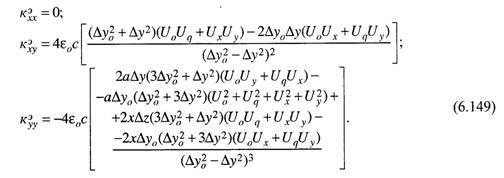 |
Для случая Δy<<Δyo выражения (6.149) упрощаются и матрица коэффициентов жесткости принимает вид:

Несмотря на явное упрощение элементов матрицы (6.150) по сравнению с матрицей
(6.149), все элементы и, кроме того, они зависят сразу от четырех изменяемых параметров (напряжений). Обнулить(устранить) эти элементы можно, если положитьUq =0, Uy = 0. В таком случае матрица (6.150) совпадает с матрицей (6.145). Если требуется предотвратить возможное появление квадратурной ошибки, очевидно , но можно потребовать выполнения равенства Uy=0 и, следовательно, тем самым уменьшить число параметров, от которых зависят внедиагональные элементы матрицы жесткости.
Элементы матрицы жесткости электростатических сил (6.149) являются нелинейными
функциями перемещений Δy и сложным, трудно прогнозируемым образом, влияют на динамику гироскопа. Определим характер нелинейностей элементов матрицы жесткости
(6.149), полагая Δy<<Δyo. Имеем следующие равенства:
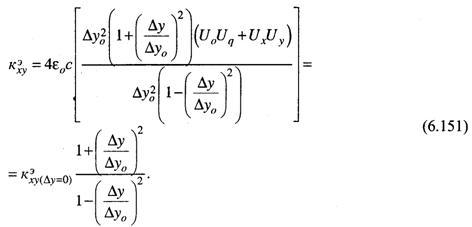 |
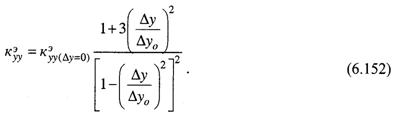 |
Аналогично может быть получено выражение
![]() В выражениях (6.151),(6.152) являются соответствующими элементами матрицы (6:150), которая отвечает условию Δy = 0. Наличие нелинейностей в сочетании с большими перемещениями элементов гироскопа может привести к их столкновению. Следует отметить, что настройка частот резонансных режимов напрямую связана с ограничениями на возможные перемещения элементов гироскопа. Если, например, движение по координате у (при измерении угловой скорости Ωz ) происходит с амплитудой всего
В выражениях (6.151),(6.152) являются соответствующими элементами матрицы (6:150), которая отвечает условию Δy = 0. Наличие нелинейностей в сочетании с большими перемещениями элементов гироскопа может привести к их столкновению. Следует отметить, что настройка частот резонансных режимов напрямую связана с ограничениями на возможные перемещения элементов гироскопа. Если, например, движение по координате у (при измерении угловой скорости Ωz ) происходит с амплитудой всего
лишь в 1% от зазора, т. е. Δy = 0,01Δyo и с частотой ωy для режима чувствительности, то амплитуда ускорения этого движения ау = 0,01 Δyo •ω2у и при ωy = 105 рад/с, Δyo =10 -6м
![]() она равна ау = 100м/с2 ≈ 10g . Это ускорение достаточно большое и может быть соизмеримо с ускорениями, действующими на корпус гироскопа. Резонансная частота режима чувствительности из условий настройки гироскопа не отличается существенно от резонансной частоты режима движения, т. е. она является большой и имеет порядок указанной выше величины. Следовательно, из условий минимизации нелинейностей элементов матрицы жесткости и ограничения ускорений движения структур ММГ перемещения Δy (измерение Ωz) или Δz (измерение Ωy) должны находиться в пределах 1% от первоначальных зазоров. Обратим внимание также на то, что демпфирование должно обеспечить устранение (сглаживание) нелинейностей в коэффициентах кэxy,(6.151).Очевидно также, что коэффициент кэyy (6.152) обладает большей нелинейностью, чем кэxy (6.151) и, кроме того, определяемая им электростатическая жесткость направлена против механической жесткости Gy упругого подвеса. Исходя из этого, необходимо выполнение условия:
она равна ау = 100м/с2 ≈ 10g . Это ускорение достаточно большое и может быть соизмеримо с ускорениями, действующими на корпус гироскопа. Резонансная частота режима чувствительности из условий настройки гироскопа не отличается существенно от резонансной частоты режима движения, т. е. она является большой и имеет порядок указанной выше величины. Следовательно, из условий минимизации нелинейностей элементов матрицы жесткости и ограничения ускорений движения структур ММГ перемещения Δy (измерение Ωz) или Δz (измерение Ωy) должны находиться в пределах 1% от первоначальных зазоров. Обратим внимание также на то, что демпфирование должно обеспечить устранение (сглаживание) нелинейностей в коэффициентах кэxy,(6.151).Очевидно также, что коэффициент кэyy (6.152) обладает большей нелинейностью, чем кэxy (6.151) и, кроме того, определяемая им электростатическая жесткость направлена против механической жесткости Gy упругого подвеса. Исходя из этого, необходимо выполнение условия:
![]() Очевидно, аналогичное уоловие может быть записано и для режима чувствительности в направлении оси z (измерение Ωy ):
Очевидно, аналогичное уоловие может быть записано и для режима чувствительности в направлении оси z (измерение Ωy ):
Неравенства (6.153),(6.154) могут быть использованы для определения предельных (критических) величин смещений, при которых не происходит электростатический «захват»
элементов с их возможным столкновением. Обозначим кэyy(Δу=0) = кэyy (0) и перепишем ус
 |
ловие (6.153) с учетом (6.152):
 |
откуда, заменив знак неравенства — равенством, найдем предельную Δy = Δyкр величину перемещений:
 |
Рассмотрим вопрос о влиянии электростатических сил жесткости на перегрузочную способность ММГ по отношению к внешнему ускорению. В установившемся режиме сила инерции внешнего ускорения ау уравновешивается силой механической жесткости упругого подвеса. Полагая для предельного случая Δy = Δyо, получим: тау = GyΔyо. Обозначим максимальное ускорение, которое может выдержать ММГ с учетом «отрицательной» электростатической жесткости ауэ и запишем равенство сил: тауэ = {Gy –кэуу) Δyкр.Разделим второе из приведенных равенств на первое и, пренебрегая в выражении (6.152) вторым слагаемым числителя по сравнению с единицей, получим отношение, характеризующее перегрузочную способность гироскопа по отношению к внешнему ускорению:
Из выражения (6.157) следует, что перегрузочная способность ММГ уменьшается при наличии «электростатической» жесткости.
Отметим также, что при расчете электростатических сил в направлении оси y не учитывались различные «паразитные» емкости, а также возможность появления сил в направлении оси z. Эти упрощения, видимо, допустимы т. к. ширина пластин конденсаторов на гребенчатых структурах соизмерима с зазорами между ними, а силы в направлении оси z не изменяют жесткость системы.
Напомним, что причиной квадратурной погрешности гироскопа является несовпадение вектора скорости чувствительного элемента с вектором электростатических сил, вызывающих режим движения. Физической причиной этого может быть наличие перекрестных жесткостей Gxy упругого подвеса. Добавим к элементам матрицы (6.150) электростатической жесткости элементы матрицы механической жесткости упругого подвеса и получим матрицу, которую назовем эффективной матрицей жесткостей гироскопа:
 |
где:Gx,Gy,Gxy —жесткости механического упругого подвеса; С0 — номинальная емкость элементов гребенчатых структур; а — линейное перекрытие элементов «гребенки» (см. рис.6.22). Очевидно, если подобрать напряжение
 |
матрица (6.158) принимает вид:
в соответствии с которой причина (Gxy), приводящая к квадратурной ошибке гироскопа, устранена.
6.2.3. Демпфирование колебаний
В камертонном ММГ, также как и в ММГ с кардановым подвесом рассеяние энергии колебательных движений происходит за счет сил внутрикристаллического трения в торсионах («конструкционное» демпфирование) и сил вязкого трения газовой среды («вязкое» демпфирование). Подход к расчету коэффициентов конструкционного демпфирования, изложенный в п.6.1.4, может быть использован и в рассматриваемом случае.
Расчет коэффициентов вязкого демпфирования по сравнению с изложенным в п.6.1.4 требует уточнения. В соответствии с рис.6.17,6.18 в камертонном ММГ помимо движений, связанных с изменением зазоров между элементами его конструкции существуют и параллельные смещения элементов. Кроме того, представляет практический интерес учет зависимости вязкости газов от давления.
Рассмотрим эти уточнения.
Для определения вязкости, газа Больцман предложил формулу
где: р — плотность газа; V, X — средняя скорость и длина свободного пробега молекулы соответственно.
Длиной свободного пробега называется средняя длина пути, проходимого молекулой между соударениями с другими молекулами. Для газа она определяется зависимостью:
 |
где к =1.38066 • 10-23 ДжIК; (постоянная Больцмана); Т— температура по шкале Кельвина (°К = °С+273); р — давление; d — диаметр молекул газа.
Пример 5.
Рассчитаем длину свободного пробега молекулы азота при Т= 20°С и давлении р = 1 атм; 0,1атм; 1 Торр = 1/760 атмосферы.
 |
Имеем d = 3,7•10-10м; 1 нормальная атм = 760 мм. рт. ст. = 1,013•105Н/м2. Для р = 1 атм получим:
Для р = 0,1 атм получим λ = 0,656 • 10-6 м, а для р= 1 Торр λ = 49,916•10-6м ≈ 50 микрон.
Из приведенного примера следует, что средний пробег молекулы азота при стандартной температуре и давлении р = 1атм примерно составляет 70 Нм. При падении давления до 0,1 атм его значение приближается к 1 микрону, а при падении давления до 1 Торр пробег возрастает до 50 микрон. Отсюда следует, во-первых, что при р < 0,1 атм вязкость газа не является постоянной и, во-вторых, средний пробег молекулы газа соизмерим не только с перемещениями ЧЭ, но и с размерами гироскопа.
В работе [119] приведена зависимость:
где h — расстояние (зазор) между пластинами;
μ р — параметр вязкости, соответствующий низкому (p<<0,1 атм) давлению (для азотной среды μ р =2,776•10-6 [с/м])
Из основного закона Ньютона вязкого течения жидкости между параллельными пластинками запишем выражение для тангенциальной силы, вызывающей сдвиг слоев жидкости
 |
где: ΔV — разность скоростей слоев в зазоре;
S — площадь слоя, по которому происходит сдвиг.
Абсолютный коэффициент демпфирования (вязкого трения) между пластинами с площадью перекрытия S равен:
учетом выражения для μ получим:
Откуда следует, что абсолютный коэффициент демпфирования для параллельно перемещающихся пластинок не зависит от зазора h, т. к. λ >> h
Формулы (6.52), (6.53) для случая p<<0,1 атм становятся пригодными, если в них величину μ полагать рекомендуемой в [119]. В частности, формула (6.52) принимает вид:
Аналогично могут быть получены зависимости для вычисления коэффициентов демпфирования прямоугольных пластинок при их поступательном (с изменением зазора h) и вращательном движениях с учетом (4.8), (4.9).
6.2.4. Жесткости подвеса и резонансные частоты
Для упругих элементов подвеса (торсионов) ЧЭ с жестким закреплением концов и отсутствием осевого напряжения вдоль торсионов справедливы зависимости (6.43), (6.44), (6.45). Наличие осевого напряжения приводит к изменению жесткости вдоль торсиона. При выводе уравнений движения предполагалось, что имеет место либо изгибная, либо крутильная деформация торсионов. В действительности движение ЧЭ обладает большой вариативностью и торсионы в динамике могут иметь и осевое напряжение, и сочетание из-гибных и крутильных деформаций. Поэтому формулы (6.43), (6.44), (6.45) и приводимые ниже имеют частный характер. Тем не менее, порядок значений, вычисляемых по ним величин, следует считать верным.
Жесткость подвеса и резонансные частоты гироскопа зависят от конкретной схемы ММГ и варианта информативного движения ЧЭ. На рис.6.24 приведена схема ММГ, соответствующая рис.6.18, с одним ЧЭ массой т, который подвешен в корпусе на четырех «точках» крепления 3 с помощью одинарных торсионов 1 и 2.
Если измеряется угловая скорость Ωz, то ЧЭ под действием силы Кориолиса 2mΩzV перемещается в плоскости ху в направлении оси y. Жесткость подвеса в направлении оси х
(режим движения) равна жесткости четырех торсионов 2: Gx = 4G2x,(G2x — жесткость
торсиона 2 в направлении оси х), а резонансная частота
Жесткость четырех торсионов 1 в направлении оси у (режим информативных колебаний, или режим чувствительности): Gy =4G1y (G1y — жесткость торсиона 1 в направлении оси у), а резонансная частота

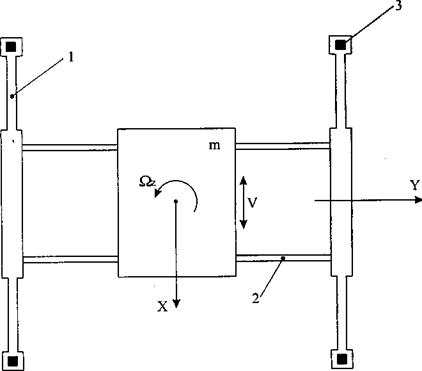
Рис.6.24. Схема подвеса ЧЭ с помощью 4-х пар одинарных торсионов: 1,2 — торсионы; 3 — «точка» крепления
При измерении угловой скорости Ωy информативное движение ЧЭ происходит под
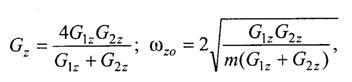 |
действием силы Кориолиса 2mΩyV в направлении оси z (из плоскости ху). При этом жесткости параллельно включенных торсионов 1 и 2 соединены последовательно по отношению друг к другу. Следовательно, суммарная жесткость подвеса в направлении оси z и резонансная частота определяются формулами:
где: G1z,G2z — соответственно жесткости торсионов 1 и 2 в направлении оси z.
Следует обратить внимание на то, что линейные колебания ЧЭ вдоль оси у и его крутильные колебания вокруг оси z (в плоскости ху) не должны приводить к столкновению элементов «гребенки» двигателей привода.
Основной недостаток схемы упругой подвески ЧЭ по рис. 6.24 заключается в непосредственном креплении системы торсионов 2 к системе торсионов 1, что приводит к взаимному влиянию их жесткостей. Этот недостаток устранен в схеме двойного подвеса ЧЭ, показанной на рис.6.25.
|
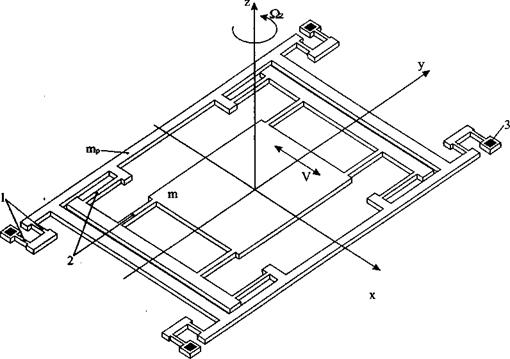
Рис.6.25. Схема двойного подвеса ЧЭ: 1,2 — торсионы; 3 — «точка» крепления
ЧЭ массой m с помощью 4-х пар торсионов 2 подвешен в рамке массой mp, которая, в свою очередь, подвешена в корпусе на четырех «точках» крепления 3 с помощью 4-х пар торсионов 1.
Жесткости каждой пары торсионов 1 или 2 по отношению друг к другу «включены» параллельно, а жесткости торсионов в паре — последовательно.
 |
Следовательно, жесткость подвеса рамки в направлении осей у, z определяется зависимостью
где G1y,G1z — соответственно жесткость торсиона 1 в направлении осей у и z. Аналогично вычисляется жесткость подвеса ЧЭ в направлении осей х, z:
где G2x,G2z — соответственно жесткость торсиона 2 в направлении осей х и z.
При измерении угловой скорости Ωz ЧЭ вместе с рамкой под действием силы Кориоли-са на системе торсионов 1 совершает информативные колебания в направлении оси у. Резонансная частота этих колебаний определяется выражением:
Аналогично могут быть вычислены резонансные частоты и для других вариантов систем упругих подвесов.
6.2.5.Настройка режимов колебаний
ММГ, как колебательная система, может быть охарактеризован резонансной частотой
(ωx = р вынужденных колебаний, частотами ωy, z информативных колебаний для схем по
рис.6.24, 6.25 или частотой ωα для схемы по рис.6.17 и показателем качества, или добротностью Q по демпфированию (см. формулы 5.57, 5.61).
Кроме добротности по демпфированию для характеристики качества механического осциллятора используется параметр добротности как отношение амплитуды его колебаний при резонансе к полосе пропускаемых частот измеряемого сигнала.
Т. к. ускорение Кориолиса — это сигнал узкой полосы частот с центром на частоте режима возбуждения колебаний, механический коэффициент усиления режима чувствительности может быть настроен соответствием или приблизительным соответствием резонансных частот режимов возбуждения колебаний и чувствительности.
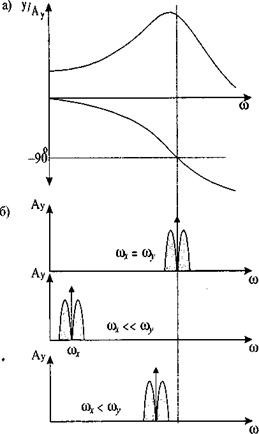
Существует несколько способов установки резонансных частот режимов возбуждения колебаний и чувствительности, показанных на рис.6.26.
|
С0Д. ffly |
Рис.6.26. К пояснению режимов настройки ММГ: а — нормированная амплитудная и фазовая частотные характеристики;
б — режимы настройки.
На рис.6.26 а) показаны зависимости отношения амплитуды у колебаний по информативной оси к амплитуде А ускорения Кориолиса и фазы этих колебаний от частоты, а на рис.6.26 б) — возможные режимы настройки ММГ.
Когда резонансные частоты совпадают ωx=ωy, механический коэффициент усиления ММГ очень высок, но полоса частот входного (измеряемой скорости) сигнала уменьшается и существует фазовый сдвиг на выходе. Если частота возбуждаемых колебаний намного меньше частоты колебаний режима чувствительности ωx<<ωy, гироскоп имеет большую полосу пропускания и не имеет фазового сдвига. Наконец, если резонансные частоты не совпадают на небольшом отрезке (например, в 10%), механический коэффициент усиления ММГ будет небольшим, полоса пропускания по сравнению с первым случаем уменьшится незначительно.
Настройка частоты ωx вынужденных движений осуществляется соответствующим подбором частоты питающего напряжения приводов. Настройка частоты информативных колебаний (режим чувствительности) осуществляется изменением жесткости подвеса в направлении этих колебаний за счет использования электростатических сил на электродах «гребенок».
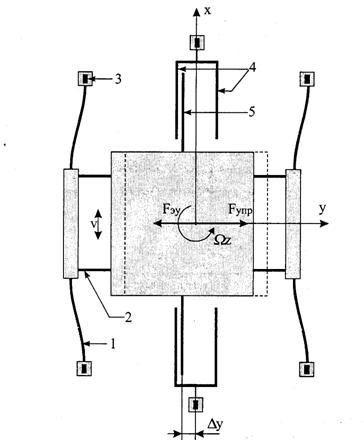
На рис.6.27 в качестве примера для схемы подвеса по рис. 6.24 показано смещение Δу
ЧЭ при его вынужденном движении со скоростью V измерении угловой скорости Ωz. В дополнение к торсионам 1, 2 и «точкам» закрепления 3, соответствующим рис. 6.24, здесь показаны неподвижные элементы 4 и подвижный палец 5, связанный с ЧЭ. На элементах «гребенки» размещены электроды, включенные в электрическую цепь и создающие электростатические силы. Очевидно, упругая сила Fуnp торсионов направлена против смещения
Δу, а электростатическая сила Fэy электродов «гребенки» — в сторону этого смещения. Суммарная сила, действующая на ЧЭ: Fynp - Fэy < Fynp и, следовательно, уменьшается жесткость подвеса и резонансная частота информативных колебаний.
 |
В общем случае «гребенки» могут содержать п пар конденсаторов и тогда для схемы подвеса по рис.6.27 с учетом (6.139) резонансная частота для режима чувствительности (в направлении оси у) определяется формулой:
где: Gоy,Δуоу— емкость i-ой пары конденсаторов и зазор между «пальцем» и электродом «гребенки»;
U0 — напряжение на конденсаторе.
Точная настройка резонансных частот возможна при соблюдении геометрических размеров элементов упругого подвеса, что при их малых размерах весьма затруднительно. При этом нужно иметь в виду, что длина упругих элементов определяется только литографией и поэтому соблюдается с большой точностью. Ширина и толщина упругих элементов определяется не только литографией, но и процессом травления. Относительные размеры упругих элементов соотносятся между собой следующим образом:
 |
 |
где: ΔLT,Δbп,Δсп — погрешности изготовления длины торсиона, ширины и толщины его поперечного размера (см. рис.6.7).
Рис. 6.27. К пояснению настройки ММГ в режиме чувствительности: 1,2 — торсионы; 3 — «точка» крепления; 4, 5 — элементы «гребенки»
 Анализ рис.6.26 показывает, что для динамики ММГ гораздо важнее отношение частот, чем их абсолютные значения. Рассмотрим зависимости отношения частот информативных движений к частоте вынужденных движений от геометрических размеров упругих элементов. Рассмотрим вначале случай измерения угловой скорости Ωz с подвесом ЧЭ по схеме рис.6.24. Запишем отношение резонансных частот информативного и вынужденного движений соответственно вдоль осей у и х:
Анализ рис.6.26 показывает, что для динамики ММГ гораздо важнее отношение частот, чем их абсолютные значения. Рассмотрим зависимости отношения частот информативных движений к частоте вынужденных движений от геометрических размеров упругих элементов. Рассмотрим вначале случай измерения угловой скорости Ωz с подвесом ЧЭ по схеме рис.6.24. Запишем отношение резонансных частот информативного и вынужденного движений соответственно вдоль осей у и х:
где:
bn i, cni, lTi — соответственно ширина, толщина и длина первого (i = 1) и второго (i = 2) торсионов.
После подстановки (6.162) в (6.161) получим:
 |
откуда, полагая bn1 = bn2 ,сn1 = сn2 имеем:
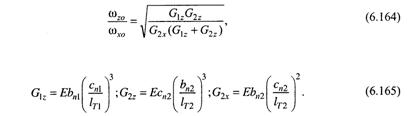 Рассмотрим теперь вариант измерения угловой скорости Ωy . В этом случае информативное движение ЧЭ происходит в направлении оси z и отношение резонансных частот равно:
Рассмотрим теперь вариант измерения угловой скорости Ωy . В этом случае информативное движение ЧЭ происходит в направлении оси z и отношение резонансных частот равно:
где:
Заметим, что формулы (6.165) записаны в предположении меньшей жесткости подвесов 1 в направлении оси z и торсионов 2 в направлении оси х.
После подстановки величин (6.165) в отношение (6.164) получим:
откуда, полагая bn1 ≈ bn2 ≈ bn, сn1 ≈ сn2 ≈ сn, следует:
Из сравнительного анализа отношений (6.163) и (6.166) следует, что ввиду технологической сложности точного соблюдения отношений сп/bп при измерении угловой скорости
Ωy, будет иметь место большая вариативность в относительном расположении резонансных частот по сравнению с измерением угловой скорости Ωz.
Аналогично может быть выполнен анализ влияния размеров торсионов на точность настройки резонансных режимов и для других схем упругих подвесов.
6.2.6. Электроника
Электроника, использующаяся в ММГ, относительно проста, т. к. все используемые напряжения - это различные линейные сочетания опорного напряжения и напряжений yправления (6.147).
Электростатические силы, используемые для движения ЧЭ чрезвычайно малы, поэтому ММГ работает в резонансных режимах и, кроме того, требуется тщательный контроль при работе гироскопа за электрическими и механическими параметрами его движения В частности, для контроля скорости ЧЭ в режиме движения может быть использован ток смещения (рис.6.28), равный:
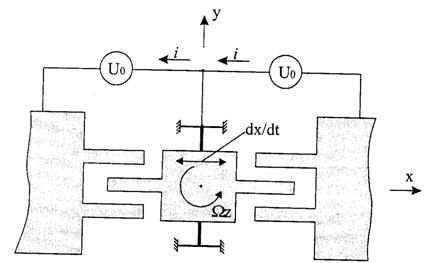 |
где емкость гребенчатой структуры С определяется по формуле (6.138).
Рис. 6.28. К возникновению тока смещения
Заметим, что если элементы гребенчатой структуры слева и справа от ЧЭ полностью идентичны, суммарный ток смещения отсутствует.
Следует обратить внимание, что контроль и поддержание (регулирование) тока смещения на заданном постоянном уровне принципиально важно для гироскопа, т к ускорение Кориолиса зависит от линейной скорости (dx/dt) ЧЭ. Следовательно, в режиме движения должна быть обеспечена постоянная амплитуда скорости ЧЭ, с помощью канала обратной связи.
Гармоническое движение ЧЭ в направлении оси x может быть обеспечено схемой с усилителем. Функциональная схема, поясняющая работу ММГ в режиме движения, приведена на рис. 6.29.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
